一种抓取力度可调的机械臂的制作方法
本技术属于机械臂,更具体地说,特别涉及一种抓取力度可调的机械臂。
背景技术:
1、铸管因其运行安全可靠、施工维修便捷、防腐性能优异等特点,广泛应用在穿路、穿越建筑的管线施工中,铸管生产时需要用到机械臂;目前的机械臂,磨损严重出现损坏时需要整体更换,不方便对磨损部位进行更换,且不能与物体弹性接触,导致物体抓取时容易发生夹伤。
技术实现思路
1、为了解决上述技术问题,本实用新型提供一种抓取力度可调的机械臂,以解决现有磨损严重出现损坏时需要整体更换,物体抓取时容易发生夹伤的问题。
2、本实用新型抓取力度可调的机械臂的目的与功效,由以下具体技术手段所达成:
3、一种抓取力度可调的机械臂,包括抓取架、支撑组件、抓取组件和保护组件;其特征在于:所述支撑组件安装在抓取架上;所述抓取组件安装在抓取架上;所述保护组件安装在支撑组件和抓取组件上;
4、所述支撑组件包括:稳定导向轴a、支撑板、限位圆环、限位支撑环和调节凸起;所述稳定导向轴a共设有两个,且两个稳定导向轴a滑动安装在抓取架的内部;所述支撑板固定安装在两个稳定导向轴a的右侧;所述限位圆环共设有两个,且两个限位圆环固定安装在两个稳定导向轴a的外端,并且两个限位圆环的右侧与抓取架接触;所述限位支撑环共设有两个,且两个限位支撑环螺纹连接在两个稳定导向轴a的外部,并且两个限位支撑环的外壁分别设置有三个调节凸起。
5、进一步的,所述抓取组件还包括:电动缸;所述电动缸固定安装在抓取架的右侧,且电动缸还与抓取板固定连接。
6、进一步的,所述支撑组件还包括:固定螺钉和支撑弹簧;所述固定螺钉共设有六个,且六个固定螺钉螺纹连接在两个限位支撑环的内部,并且六个固定螺钉的内端与两个稳定导向轴a接触;所述支撑弹簧共设有两个,且两个支撑弹簧安装在两个稳定导向轴a的外部,并且两个支撑弹簧位于抓取架和两个限位支撑环之间。
7、进一步的,所述保护组件包括:连接块和保护板;所述连接块共设有四个,且四个连接块插入在支撑板和抓取板的内部;所述保护板共设有两个,且两个保护板固定安装在四个连接块的内端。
8、进一步的,所述抓取组件包括:稳定导向轴b和抓取板;所述稳定导向轴b共设有两个,且两个稳定导向轴b滑动安装在抓取架的内部;所述抓取板固定安装在两个稳定导向轴b的左侧。
9、进一步的,所述保护组件还包括:u型限位架;所述u型限位架共设有两个,且两个u型限位架插入在支撑板、抓取板和四个连接块的内部,并且两个u型限位架与支撑板、抓取板和四个连接块过盈配合连接。
10、与现有技术相比,本实用新型具有如下有益效果:
11、1、该抓取力度可调的机械臂,因两个限位支撑环螺纹连接在两个稳定导向轴a的外部,且两个限位支撑环的外壁分别设置有三个调节凸起,从而方便工作人员通过六个调节凸起适当调整两个限位支撑环的位置,对两个支撑弹簧起到了调节作用,便于工作人员适当调整抓取力度,又因六个固定螺钉螺纹连接在两个限位支撑环的内部,且六个固定螺钉的内端与两个稳定导向轴a接触,进而使得两个限位支撑环调整后更加稳定。
12、2、该抓取力度可调的机械臂,因电动缸固定安装在抓取架的右侧,且电动缸还与抓取板固定连接,从而当电动缸工作时抓取板发生移动,对铸管起到了抓取作用。
13、3、该抓取力度可调的机械臂,因两个保护板固定安装在四个连接块的内端,从而对支撑板和抓取板起到了保护作用,避免了支撑板和抓取板因磨损发生损坏,又因两个u型限位架插入在支撑板、抓取板和四个连接块的内部,并且两个u型限位架与支撑板、抓取板和四个连接块过盈配合连接,进而方便工作人员对损坏的两个保护板进行更换,提高了本实用新型的整体使用寿命。
技术特征:
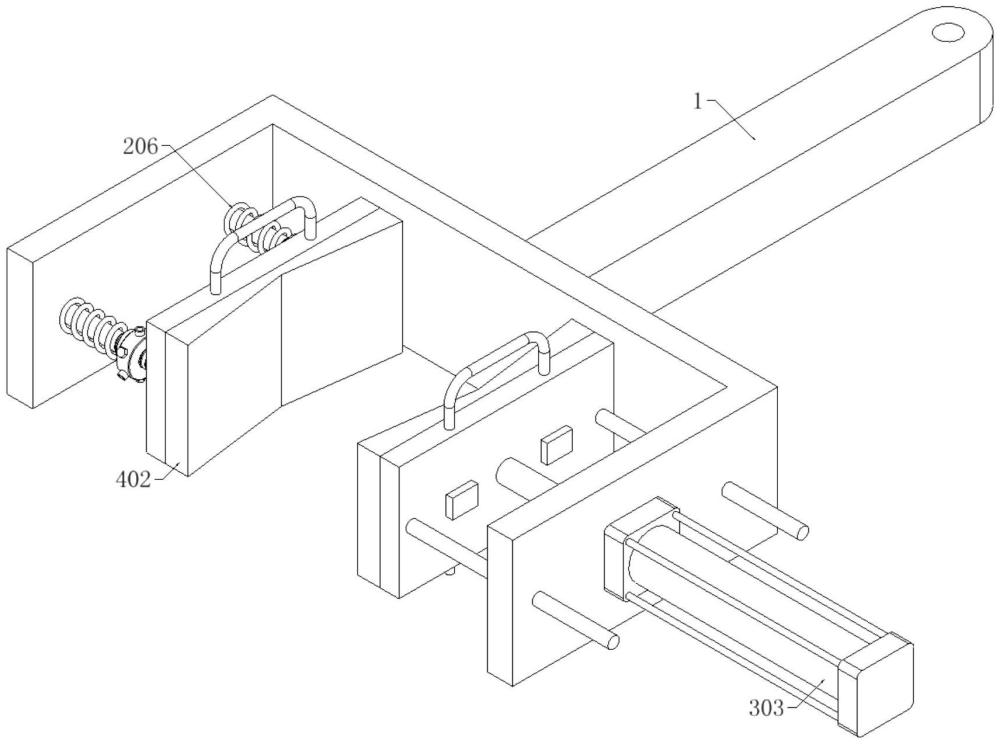
1.一种抓取力度可调的机械臂,包括抓取架(1)、支撑组件(2)、抓取组件(3)和保护组件(4);其特征在于:所述支撑组件(2)安装在抓取架(1)上;所述抓取组件(3)安装在抓取架(1)上;所述保护组件(4)安装在支撑组件(2)和抓取组件(3)上;
2.根据权利要求1所述的一种抓取力度可调的机械臂,其特征在于:所述支撑组件(2)还包括:固定螺钉(205)和支撑弹簧(206);所述固定螺钉(205)共设有六个,且六个固定螺钉(205)螺纹连接在两个限位支撑环(204)的内部,并且六个固定螺钉(205)的内端与两个稳定导向轴a(201)接触;所述支撑弹簧(206)共设有两个,且两个支撑弹簧(206)安装在两个稳定导向轴a(201)的外部,并且两个支撑弹簧(206)位于抓取架(1)和两个限位支撑环(204)之间。
3.根据权利要求1所述的一种抓取力度可调的机械臂,其特征在于:所述抓取组件(3)包括:稳定导向轴b(301)和抓取板(302);所述稳定导向轴b(301)共设有两个,且两个稳定导向轴b(301)滑动安装在抓取架(1)的内部;所述抓取板(302)固定安装在两个稳定导向轴b(301)的左侧。
4.根据权利要求3所述的一种抓取力度可调的机械臂,其特征在于:所述抓取组件(3)还包括:电动缸(303);所述电动缸(303)固定安装在抓取架(1)的右侧,且电动缸(303)还与抓取板(302)固定连接。
5.根据权利要求3所述的一种抓取力度可调的机械臂,其特征在于:所述保护组件(4)包括:连接块(401)和保护板(402);所述连接块(401)共设有四个,且四个连接块(401)插入在支撑板(202)和抓取板(302)的内部;所述保护板(402)共设有两个,且两个保护板(402)固定安装在四个连接块(401)的内端。
6.根据权利要求5所述的一种抓取力度可调的机械臂,其特征在于:所述保护组件(4)还包括:u型限位架(403);所述u型限位架(403)共设有两个,且两个u型限位架(403)插入在支撑板(202)、抓取板(302)和四个连接块(401)的内部,并且两个u型限位架(403)与支撑板(202)、抓取板(302)和四个连接块(401)过盈配合连接。
技术总结
本技术提供一种抓取力度可调的机械臂,涉及机械臂技术领域,以解决现有磨损严重出现损坏时需要整体更换,物体抓取时容易发生夹伤的问题,包括抓取架所述支撑组件安装在抓取架上;所述抓取组件安装在抓取架上;所述保护组件安装在支撑组件和抓取组件上;所述限位圆环共设有两个,且两个限位圆环固定安装在两个稳定导向轴A的外壁,并且两个限位圆环的右侧与限位圆环接触;该抓取力度可调的机械臂,又因两个U型限位架插入在支撑板、抓取板和四个连接块的内部,并且两个U型限位架与支撑板、抓取板和四个连接块过盈配合连接,进而方便工作人员对损坏的两个保护板进行更换,提高了本技术的整体使用寿命。
技术研发人员:吕琳,屠树青,牟宗强
受保护的技术使用者:山西华茂智能新材料有限公司
技术研发日:20230809
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!