一种硬臂式助力机械手的制作方法
本技术涉及机械手,具体为一种硬臂式助力机械手。
背景技术:
1、硬臂式助力机械手是一种机械臂系统,它使用刚性杆件和关节连接来实现运动,该机械手通常由多个关节组成,每个关节都具有自己的电机和驱动系统,用于控制其运动。硬臂式助力机械手通常应用在有扭矩产生的情况下,比如在工件重心远离臂悬挂点,或是工件需要翻转或倾斜。
2、中国专利文献cn213796522u公开了一种硬臂式助力机械手,该专利采用固定式安装方式,存在搬运范围小的缺陷,且该专利中主力臂为费力杠杆,工件重心远离臂悬挂点,主力臂起重工件的平衡性较差。
技术实现思路
1、本实用新型的目的在于提供一种硬臂式助力机械手,以解决上述背景技术中提出的问题。
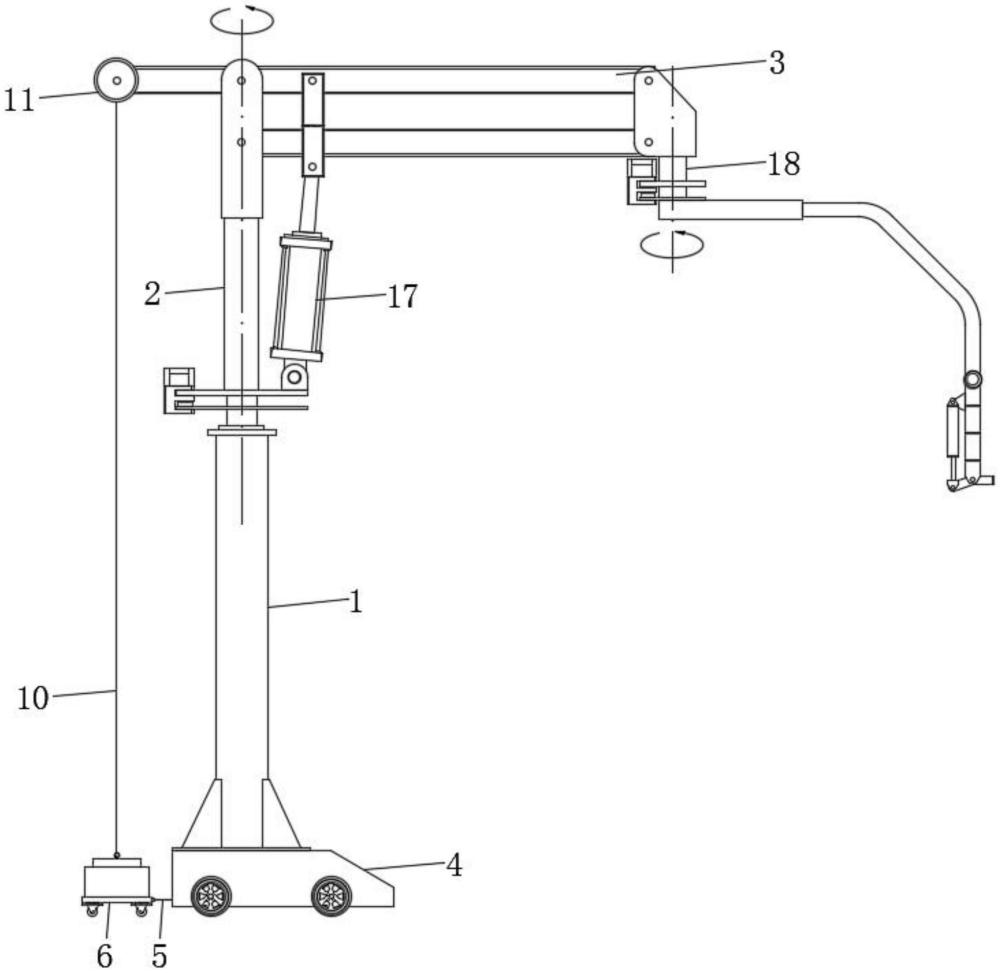
2、为实现上述目的,本实用新型提供如下技术方案:一种硬臂式助力机械手,包括立柱,所述立柱的顶部设有主旋转轴,所述主旋转轴的顶部铰接有主力臂,所述立柱的底部固定设有自动导向车,所述主力臂的短臂端下方设有平板车,所述平板车和所述自动导向车之间固定设有牵引杆,所述平板车上设有若干个上下设置的配重块,下一级配重块的上表面固定设有活动套接上一级配重块的圆筒,上下相邻的配重块和圆筒之间固定设有牵引绳,位于最上方的配重块的上表面固定设有钢丝绳,所述主力臂的短臂端固定设有收卷所述钢丝绳的电动卷扬机。
3、可选的,所述配重块为圆饼形结构,所述配重块的外径大于所述圆筒的内径,所述牵引绳的长度大于所述圆筒的深度。
4、可选的,所述配重块的下表面开设有容纳所述牵引绳的凹槽,所述凹槽为圆台孔结构,位于最上方的配重块的上表面固定设有挂环,所述钢丝绳的底端绑扎于所述挂环上。
5、可选的,所述平板车包括平板以及安装于所述平板下表面的万向脚轮,所述平板的上表面固定连接有圆环体,所述配重块设于所述圆环体内,所述圆环体的内壁固定套接有软垫圈。
6、可选的,所述牵引杆的一端和所述平板之间固定连接有左右铰链,所述牵引杆的另一端和所述自动导向车通过螺栓连接。
7、可选的,所述主旋转轴上固定设有举升气缸,所述举升气缸的输出轴活塞杆与所述主力臂铰接,所述主力臂的长臂端固定设有次旋转轴。
8、与现有技术相比,本实用新型具备以下有益效果:
9、1.本实用新型通过电动卷扬机起吊配重块,使得机械手重心向主力臂的短臂端移动,提高主力臂起重工件的平衡性,可以根据工件重量不同,选择起吊合适数量的配重块;
10、2.本实用新型通过圆筒套接配重块,一方面使得若干个配重块可以集中收纳,另一方面配重块可以上下叠放,降低电动卷扬机起吊钢丝绳长度。
技术特征:
1.一种硬臂式助力机械手,包括立柱(1),所述立柱(1)的顶部设有主旋转轴(2),所述主旋转轴(2)的顶部铰接有主力臂(3),其特征在于:所述立柱(1)的底部固定设有自动导向车(4),所述主力臂(3)的短臂端下方设有平板车(6),所述平板车(6)和所述自动导向车(4)之间固定设有牵引杆(5),所述平板车(6)上设有若干个上下设置的配重块(7),下一级配重块(7)的上表面固定设有活动套接上一级配重块(7)的圆筒(8),上下相邻的配重块(7)和圆筒(8)之间固定设有牵引绳(9),位于最上方的配重块(7)的上表面固定设有钢丝绳(10),所述主力臂(3)的短臂端固定设有收卷所述钢丝绳(10)的电动卷扬机(11)。
2.根据权利要求1所述的一种硬臂式助力机械手,其特征在于:所述配重块(7)为圆饼形结构,所述配重块(7)的外径大于所述圆筒(8)的内径,所述牵引绳(9)的长度大于所述圆筒(8)的深度。
3.根据权利要求2所述的一种硬臂式助力机械手,其特征在于:所述配重块(7)的下表面开设有容纳所述牵引绳(9)的凹槽(12),所述凹槽(12)为圆台孔结构,位于最上方的配重块(7)的上表面固定设有挂环(13),所述钢丝绳(10)的底端绑扎于所述挂环(13)上。
4.根据权利要求1所述的一种硬臂式助力机械手,其特征在于:所述平板车(6)包括平板以及安装于所述平板下表面的万向脚轮,所述平板的上表面固定连接有圆环体(14),所述配重块(7)设于所述圆环体(14)内,所述圆环体(14)的内壁固定套接有软垫圈(15)。
5.根据权利要求4所述的一种硬臂式助力机械手,其特征在于:所述牵引杆(5)的一端和所述平板之间固定连接有左右铰链(16),所述牵引杆(5)的另一端和所述自动导向车(4)通过螺栓连接。
6.根据权利要求1所述的一种硬臂式助力机械手,其特征在于:所述主旋转轴(2)上固定设有举升气缸(17),所述举升气缸(17)的输出轴活塞杆与所述主力臂(3)铰接,所述主力臂(3)的长臂端固定设有次旋转轴(18)。
技术总结
本技术涉及机械手技术领域,具体为一种硬臂式助力机械手,包括立柱,主旋转轴,以及主力臂,立柱的底部固定设有自动导向车,主力臂的短臂端下方设有平板车,平板车和自动导向车之间固定设有牵引杆,平板车上设有若干个上下设置的配重块,下一级配重块的上表面固定设有活动套接上一级配重块的圆筒,上下相邻的配重块和圆筒之间固定设有牵引绳,位于最上方的配重块的上表面固定设有钢丝绳,主力臂的短臂端固定设有收卷钢丝绳的电动卷扬机。本技术通过电动卷扬机起吊配重块,使得机械手重心向主力臂的短臂端移动,提高主力臂起重工件的平衡性,可以根据工件重量不同,选择起吊合适数量的配重块。
技术研发人员:卜县城
受保护的技术使用者:常州承一机械设备有限公司
技术研发日:20230811
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!