一种机器人第七轴地轨的制作方法
本技术涉及机器人第七轴地轨结构的,具体涉及一种机器人第七轴地轨。
背景技术:
1、目前的第七轴机器人在使用时通常是安装在地轨上使用,机器人可在地轨上行走。
2、目前的机器人的旋转方式是±180°旋转,不是0-360°旋转,如果机器人安装方向不对,机器人工作时需要旋转的角度就更大,增加机器人拿取和放置工件的时间,增加生产成本。
技术实现思路
1、本实用新型的目的是提供一种机器人第七轴地轨,使机器人可朝向多个方向安装,将机器人安装在工作时需要旋转角度小的方向,提升工作效率,降低生产成本。
2、为实现上述目的,本实用新型采用如下技术方案。
3、一种机器人第七轴地轨,包括地轨本体和机器人底座,所述地轨本体上可滑动安装有机器人安装大板,所述机器人底座上安装有机器人,所述机器人安装大板上设置有至少一组安装孔,至少两个呈圆形均布的安装孔构成一组安装孔,所述机器人底座上形成有与所述安装孔相对应的连接孔,螺栓穿过所述连接孔和安装孔将连接在机器人安装大板上的所述机器人可至少朝向在同一直线上的两相反方向。
4、采用上述技术方案的本实用新型,通过机器人安装大板上设置有至少一组安装孔,至少两个呈圆形均布的安装孔构成一组安装孔,并在机器人底座上形成有与安装孔相对应的连接孔,便于通过螺栓穿过连接孔和连接孔将连接在机器人安装大板上的机器人可至少朝向在同一直线上的两相反方向,在机器人实际工作时,可将机器人安装在工作时需要旋转角度小的方向,提升机器人工作效率,降低生产成本。
5、优选的,所述机器人底座整体呈正方形,所述正方形的四个角上均设置有一个连接孔构成一组连接孔,所述机器人安装大板上设置有与一组所述连接孔相对齐的一组安装孔。
6、通过在机器人底座正方形的四个角上均设置有一个连接孔构成一组连接孔,便于机器人可朝四个方向安装,将机器人安装在工作时需要旋转角度小的方向,提升机器人工作效率,降低生产成本。
7、优选的,所述正方形的四个角上均设置有三个连接孔构成三组连接孔,所述机器人安装大板上设置有与三组所述连接孔相对齐的三组安装孔。
8、通过在正方形的四个角上均设置有三个连接孔构成三组连接孔,便于提交安装机器人的强度和刚度。
9、优选的,所述机器人安装大板的一侧安装有至少两个拖链安装板,任一所述拖链安装板均可安装拖链。
10、通过安装有至少两个拖链安装板,便于可根据实际需要选择任一托链安装板来安装拖链,便于可选择拖链的安装位置。
11、优选的,所述地轨本体由数个轨道通过连接结构连接形成。
12、这样,将地轨本体由数个轨道通过连接结构连接形成,便于可根据实际需要调整轨道安装个数,调节轨道本体的长度。
13、优选的,所述连接结构包括两对接块和连接螺栓,两所述对接块分别固定连接在对应轨道的侧面,每个所述对接块上均形成有通孔,连接螺栓穿过所述通孔与螺母螺合将两所述对接块固定连接。
14、这样,通过设置两对接块和连接螺栓,便于通过两对接块对准连接的两轨道定位,并通过连接螺栓穿过所通孔与螺母螺合,将两对接块固定连接,进而将两个轨道形成定位连接。
15、优选的,所述轨道的侧面固定连接有连接板,所述连接板上形成有安装孔,调节螺栓穿过所述安装孔与底板螺接。
16、通过在轨道的侧面固定连接有连接板,并在连接板上形成有安装孔,便于通过调节螺栓穿过安装孔与底板螺接。
17、优选的,所述连接板上还安装有化学螺栓,通过所述化学螺栓将所述轨道连接在地板上。
18、通过在连接板上安装化学螺栓,便于通过化学螺栓将轨道连接在地板上,保证轨道安装在地板上的刚度和强度。
19、优选的,所述轨道安装有拖链安装板的一侧安装有拖链导条。
20、通过设置拖链导条,便于对拖链形成导向。
21、优选的,所述机器人上安装有接水盘,所述接水盘位于机器人的电机上方,靠近所述接水盘的边缘处形成有通孔,所述通孔构成导流孔。
22、通过设置接水盘,防止机器人夹取的零件上的水掉落在机器人的电机上,并设置导流孔,对水进行引流和收集保证工作环境干净整洁。
23、本实用新型的有益效果是,通过在机器人安装大板上形成有数组安装孔,并在机器人底座上形成有数组连接孔,使任一组连接孔均可与任一组连接孔相对齐且余下的数组安装孔与连接孔均相对齐,便于通过螺栓穿过连接孔和连接孔将安装在机器人底座上的机器人可朝向任一方向连接在机器人安装大板上,在机器人实际工作时,可将机器人安装在工作时需要旋转角度小的方向,提升机器人工作效率,降低生产成本。通过安装有至少两个拖链安装板,便于可根据实际需要选择任一托链安装板来安装拖链,便于可选择拖链的安装位置。这样,将地轨本体由数个轨道通过连接结构连接形成,便于可根据实际需要调整轨道安装个数,调节轨道本体的长度。
技术特征:
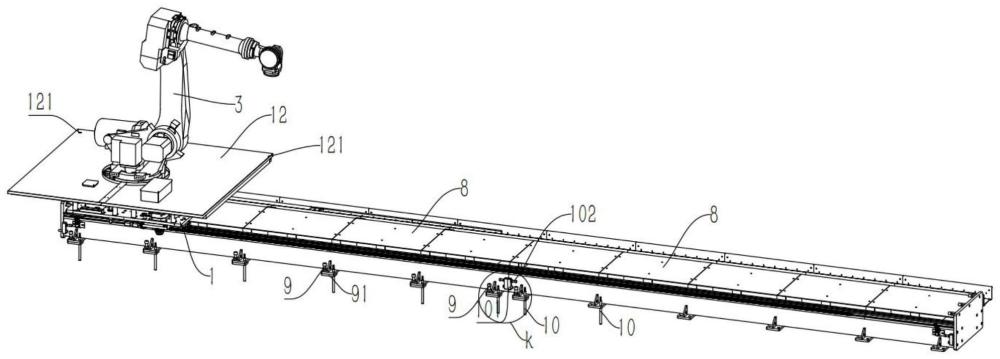
1.一种机器人第七轴地轨,其特征在于,包括地轨本体和机器人底座(4),所述地轨本体上可滑动安装有机器人安装大板(1),所述机器人底座(4)上安装有机器人(3),所述机器人安装大板(1)上设置有至少一组安装孔(11),至少两个呈圆形均布的安装孔(11)构成一组安装孔(11),所述机器人底座(4)上形成有与所述安装孔(11)相对应的连接孔(41),螺栓穿过所述连接孔(41)和安装孔(11)将连接在机器人安装大板(1)上的所述机器人(3)可至少朝向在同一直线上的两相反方向。
2.根据权利要求1所述的机器人第七轴地轨,其特征在于,所述机器人底座(4)整体呈正方形,所述正方形的四个角上均设置有一个连接孔(41)构成一组连接孔(41),所述机器人安装大板(1)上设置有与一组所述连接孔(41)相对齐的一组安装孔(11)。
3.根据权利要求2所述的机器人第七轴地轨,其特征在于,所述正方形的四个角上均设置有三个连接孔(41)构成三组连接孔(41),所述机器人安装大板(1)上设置有与三组所述连接孔(41)相对齐的三组安装孔(11)。
4.根据权利要求1所述的机器人第七轴地轨,其特征在于,所述机器人安装大板(1)的一侧安装有至少两个拖链安装板(132),任一所述拖链安装板(132)均可安装拖链(13)。
5.根据权利要求1所述的机器人第七轴地轨,其特征在于,所述地轨本体由数个轨道(8)通过连接结构连接形成。
6.根据权利要求5所述的机器人第七轴地轨,其特征在于,所述连接结构包括两对接块(101)和连接螺栓(102),两所述对接块(101)分别固定连接在对应轨道(8)的侧面,每个所述对接块(101)上均形成有通孔,连接螺栓(102)穿过所述通孔与螺母螺合将两所述对接块(101)固定连接。
7.根据权利要求5所述的机器人第七轴地轨,其特征在于,所述轨道(8)的侧面固定连接有连接板(91),所述连接板(91)上形成有安装孔,调节螺栓(9)穿过所述安装孔与底板螺接。
8.根据权利要求7所述的机器人第七轴地轨,其特征在于,所述连接板(91)上还安装有化学螺栓(10),通过所述化学螺栓(10)将所述轨道(8)连接在地板上。
9.根据权利要求5所述的机器人第七轴地轨,其特征在于,所述轨道(8)安装有拖链安装板(132)的一侧安装有拖链导条(131)。
10.根据权利要求1所述的机器人第七轴地轨,其特征在于,所述机器人(3)上安装有接水盘(12),所述接水盘(12)位于机器人(3)的电机上方,靠近所述接水盘(12)的边缘处形成有通孔,所述通孔构成导流孔(121)。
技术总结
本技术公开了一种机器人第七轴地轨,机器人第七轴地轨包括地轨本体和机器人底座,地轨本体上可滑动安装有机器人安装大板,机器人底座上安装有机器人,机器人安装大板上设置有至少一组安装孔,至少两个呈圆形均布的安装孔构成一组安装孔,机器人底座上形成有与安装孔相对应的连接孔,螺栓穿过连接孔和安装孔将连接在机器人安装大板上的机器人可至少朝向在同一直线上的两相反方向。本技术的有益效果是:在机器人安装大板上设置安装孔,并在机器人底座上形成有对应的连接孔,使机器人的朝向至少在同一直线上的两相反方向连接在机器人安装大板上,可将机器人安装在工作时需要旋转角度小的方向,提升机器人工作效率,降低生产成本。
技术研发人员:王一,彭加国,朱向成
受保护的技术使用者:四川盛弘机械有限公司
技术研发日:20230811
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!