一种人形仿真机器人动态眼皮装置的制作方法
本技术涉及机器人动态眼皮,具体为一种人形仿真机器人动态眼皮装置。
背景技术:
1、高仿真人形机器人的整体结构,可以高度还原人体的运动,有较高的自由度,可以实现多种肢体运动,动作灵活且协调。通过丰富的肢体运动,表达人物情感。
2、而现有仿真机器人模拟眼皮动态装置多半是依靠内部电机驱动硬质的传动杆推拉眼皮转动,内部结构复杂导致组装成本高、维修工时长。行业中也有提出拉线代替硬质传动杆做旋转驱动,头部有限空间内,为了保障电机舵盘通过推杆推拉眼皮结构顺利执行,电机安装位置基本被强制设计在推杆的末端,电机推杆和眼皮连接点成一线,限制了电机的安装位置,缩减了头骨内支撑结构、电机、电路、电池等其他部件优化方案的可选性,拉线结构内部设计,因为拉线容易通过定滑轮转向,电机安装位置更灵活,电机可以在脑后部位通过拉线穿过头骨中间支撑的孔洞来拉拽前部眼皮结构运动。
3、但是拉线结构一个致命硬伤,是在舵盘上手工系线时的打结操作:因为拉线一端系在眼皮控制点,另一端末端系在电机舵盘上,而手工打结时必须将拉线结成圆圈扣后拉拽锁死在舵盘孔上(操作类同缝衣针对线末端的打结,如图5),此时圆圈被拉拽后打结的结果不能保证刚好在拉线拉直的最末端锁死结扣,多数可能是结扣后舵盘与眼皮控制点间拉线留有多余松量而不是绷直的线段(如图6)。这样电机转动控制眼皮时牵引拉线总有一段空跑余量,这段空跑余量一般3-10mm不等,手动操作不具有一致性(如图6中2种不同松度的结扣对照)。所以导致每次打结后的控制都需要针对每个眼球组合单独测量松量并单独在软件中微调参数以调整电机做运动的补偿。对于量产产品这种硬件组装的影响是致命的,因为该不一致性将导致后期调试流程增加,未来维修成本增高。所以,拉线结构普遍在现存的眼动设计方案中被淘汰。
技术实现思路
1、本实用新型的目的在于提供一种人形仿真机器人动态眼皮装置,解决的技术问题为:由于拉线在手工系线打结过程中不可避免的留线余量问题,导致组装后拉线松紧度一致性下降。
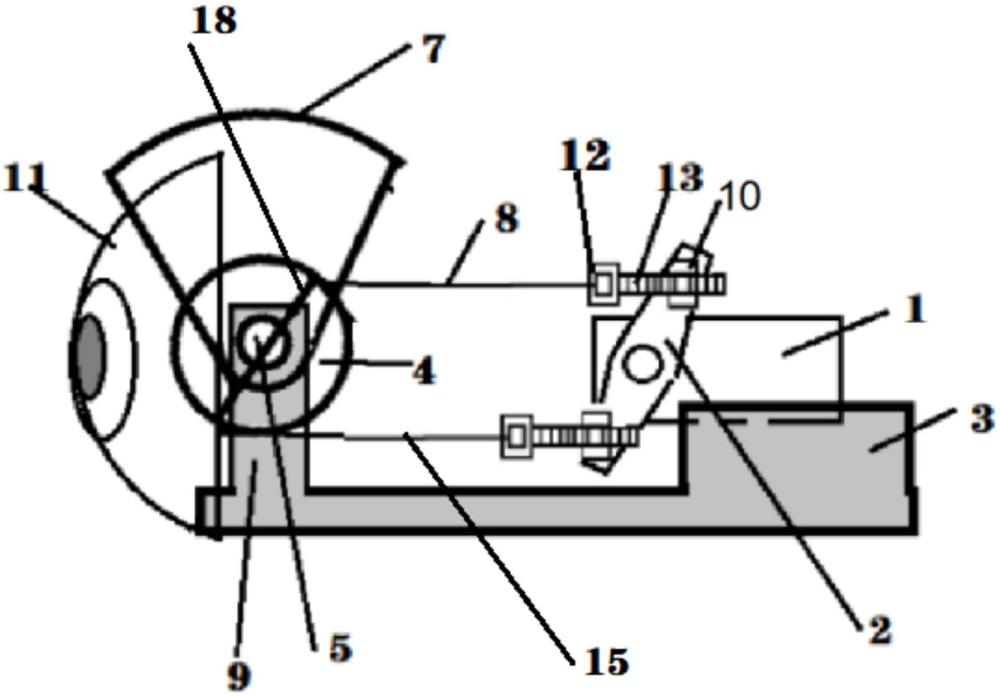
2、为了解决上述技术问题,本实用新型提供如下技术方案:一种人形仿真机器人动态眼皮装置,包括基座,所述基座的一侧上端固定设置有支撑架,所述支撑架的上端贯穿转动设置有延伸轴,所述延伸轴的中间位置固定设置有眼皮转动底盘,所述眼皮转动底盘与上下拉线转动机构连接,所述延伸轴的两端与眼皮的内侧壁固定连接,所述基座的一端固定设置有眼球。
3、在一种优选的实施方式中,所述支撑架为固定设置于基座上端的两个立柱,两个所述立柱上开设有供延伸轴穿过的通孔,通孔的设置方便延伸轴与支撑架转动连接,上端有通孔供眼皮转动底盘双侧延伸轴穿入并有一定松量方便眼皮延伸轴在内部转动。
4、在一种优选的实施方式中,所述上下拉线转动机构包括固定设置于基座上端的舵机,所述舵机的输出轴固定连接有舵盘,所述舵盘的上下两端均设置有第二扎带末端锁扣,所述第二扎带末端锁扣内中空空间供扎带带体穿过,根据标准工业扎带设计的用途,扎带带体可以单向穿过锁扣并依靠带体上微小齿条卡在锁扣内不可撤出;所述扎带带体远离第二扎带末端锁扣的一端设置有第一扎带末端锁扣,第一扎带末端锁扣和扎带带体本身就是工业通用的一条扎带整体,拉动眼皮底盘转动的拉线结扣就系在第一扎带末端锁扣上。
5、在一种优选的实施方式中,所述眼皮转动底盘上开设有供拉线穿过的线孔,所述拉线穿过线孔将两个第一扎带末端锁扣连接,线孔的设置方便拉线与眼皮转动底盘连接。
6、在一种优选的实施方式中,舵盘上开设有舵盘穿线孔,舵盘穿线孔的设置就是为了固定第二扎带末端锁扣,将锁扣的中空部分固定并暴露在舵盘一端,方便扎带带体穿过第二扎带末端锁扣并实现带体齿条与第二扎带末端锁扣的咬合锁定。
7、在一种优选的实施方式中,所述眼皮转动底盘为圆盘状,所述拉线采用完整无弹性的线。
8、与现有技术相比,本实用新型所达到的有益效果是:
9、本实用新型采用了辅助拉线打结的全新设计,打结时不可避免的拉线余量通过扎带补偿拉入,最终通过拉线与扎带的联合作用将拉线拉直,整个拉线驱动装置具有一致性。既保留了拉线结构的成本、组装优势,同时规避了拉线结构的原有弊端,最终使便捷的拉线控制结构能够落地实现、满足量产的一致性要求,电机的软件程序不需要逐个检测微调,可以通用。
技术特征:
1.一种人形仿真机器人动态眼皮装置,包括基座(3),其特征在于,所述基座(3)的一侧上端固定设置有支撑架(9),所述支撑架(9)的上端贯穿转动设置有延伸轴(5),所述延伸轴(5)的中间位置固定设置有眼皮转动底盘(4),所述眼皮转动底盘(4)与上下拉线转动机构连接,所述延伸轴(5)的两端与眼皮(7)的内侧壁固定连接,所述基座(3)的一端固定设置有眼球(11)。
2.根据权利要求1所述的一种人形仿真机器人动态眼皮装置,其特征在于,所述支撑架(9)为固定设置于基座(3)上端的两个立柱,两个所述立柱上开设有供延伸轴(5)穿过的通孔。
3.根据权利要求1所述的一种人形仿真机器人动态眼皮装置,其特征在于,所述上下拉线转动机构包括固定设置于基座(3)上端的舵机(1),所述舵机(1)的输出轴固定连接有舵盘(2),所述舵盘(2)的上下两端均开设有舵盘穿线孔,上端的所述舵盘穿线孔(6)设置有上拉线第二扎带末端锁扣(10),所述上拉线第二扎带末端锁扣(10)供上拉线扎带带体(13)穿过,所述上拉线扎带带体(13)远离上拉线第二扎带末端锁扣(10)的一端设置有上拉线第一扎带末端锁扣(12),所述第一扎带末端锁扣(12)通过系扣方式连接上拉线(8);
4.根据权利要求3所述的一种人形仿真机器人动态眼皮装置,其特征在于,所述眼皮转动底盘(4)上开设有供上拉线(8)和下拉线(15)穿过的眼皮转动底盘穿线孔(18),所述上拉线第二扎带末端锁扣(10)经过上拉线扎带带体(13)、上拉线第一扎带末端锁扣(12)、上拉线(8)、眼皮转动底盘穿线孔(18)、下拉线(15)、下拉线第一扎带末端锁扣(17)、下拉线扎带带体(16)、下拉线第二扎带末端锁扣(14)与舵盘(2)形成一个闭环,为上下拉线转动机构。
5.根据权利要求3所述的一种人形仿真机器人动态眼皮装置,其特征在于,所述眼皮转动底盘(4)为圆盘状,所述上拉线(8)和下拉线(15)为同一条无弹性的线的两端部分。
技术总结
本技术公开了一种人形仿真机器人动态眼皮装置,具体涉及人形机器人表情造型领域,包括基座,所述基座的一侧上端固定设置有支撑架,所述支撑架的上端贯穿设置有可转动的延伸轴,所述延伸轴的中间位置固定设置有眼皮转动底盘,所述眼皮转动底盘与上下拉线转动机构连接,所述延伸轴的两端与眼皮的内侧壁固定连接,所述基座的一端固定设置有眼球;本装置采用了辅助拉线打结的补偿拉直设计,将拉线结扣后的多余松量通过扎带补偿拉直,最终通过拉线与扎带的联合作用将拉线拉直,该设计既保留了拉线结构的成本、组装优势,同时规避了拉线结构的原有弊端,最终使便捷的拉线控制结构能够落地实现,满足量产的一致性要求。
技术研发人员:任瑞,王春林
受保护的技术使用者:无锡傅里叶科技有限公司
技术研发日:20230814
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!