一种转移机械手的制作方法
本技术属于机械手,具体涉及一种转移机械手。
背景技术:
1、工件为机械加工过程中的零件,且对工件加工打磨处理时需要对工件从一个位置处向打磨位置处转移加工,通常通过转移机械手对工件转移打磨操作,且现有的机械手为打磨加工时转移工件使用的设备,且机械手在加工时直接将其加强支撑夹取工件,将工件从放置处转移至打磨加工处打磨处理,且在转移操作时加强支撑固定,并转移时加强防护,提高机械手在夹取工件转移打磨处理时加强支撑固定性与防护使用效果;
2、现有的机械手为工件加工打磨处理时,直接由夹持机构对加工打磨的工件夹持固定并转移至打磨机处打磨,当机械手转移工件夹持时将夹板嵌入工件端部的内表面,气缸运动下将夹板挤压在工件的内表面进行夹持,因此在夹持固定时对夹板向侧面移动挤压,在挤压时夹板的底端不易加强支撑,受力较大时易造成夹板底端挤压夹取至变形损坏,并对工件夹持不紧固,同时机械手在夹取并转移工件时不便于对端部防护,转移时不注意触碰外界时易造成损坏,且影响机械手对工件夹取打磨处理时夹取的加强支撑防护效果的问题,为此我们提出一种转移机械手。
技术实现思路
1、本实用新型的目的在于提供一种转移机械手,以解决上述背景技术中提出机械手夹持工件时不便于对夹板的底端加强支撑,受力较大时易造成夹板底端挤压夹取至变形损坏,并对工件夹持不紧固,同时转移时不注意触碰外界时易造成损坏,且影响机械手对工件夹取打磨处理时夹取的加强支撑防护效果的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种转移机械手,包括机械手主体,所述机械手主体包括固定座、机械臂三、连接座与紧压夹板,所述连接座通过电机安装在机械臂三的底端,所述紧压夹板通过气缸安装在连接座的两侧,所述机械手主体上还设置有:
3、加强支撑防护机构,且该加强支撑防护机构包括弹性连接组件、加强支撑组件与缓冲防护组件,所述弹性连接组件设置在紧压夹板的内部,所述加强支撑组件设置在两组弹性连接组件的连接处,所述缓冲防护组件设置在机械臂三的外表面;
4、加固安装机构,且该加固安装机构包括固定安装组件与加固支撑组件,所述固定安装组件设置在固定座的外表面,所述加固支撑组件设置在固定安装组件的边缘处。
5、优选的,所述固定座的上表面转动连接有旋转座,所述旋转座的端部设置有机械臂一,所述机械臂一的端部设置有机械臂二,且所述机械臂二与所述机械臂三转动连接。
6、优选的,所述弹性连接组件包括开设在紧压夹板内部的滑槽,所述滑槽的内部两端滑动连接有滑块,两个所述滑块的连接处焊接固定有紧压弹簧,所述滑块的端部位于紧压夹板的表面焊接固定有连接块。
7、优选的,两个所述滑块相互对称设置,且两个所述滑块通过所述紧压弹簧弹性连接。
8、优选的,所述加强支撑组件包括通过连接销安装在两个连接块连接处的加强支撑杆,且两个所述加强支撑杆交叉设置,两个所述加强支撑杆的中间位置处通过连接销活动连接。
9、优选的,所述缓冲防护组件包括设置在机械臂三外表面的防护筒,所述防护筒的内表面设置有弹性缓冲环,所述弹性缓冲环的外表面与内表面分别通过螺钉固定安装有固定筒b与固定筒c,且所述固定筒c与所述机械臂三的外表面通过螺钉固定连接,所述固定筒b与防护筒的内表面通过螺钉固定连接。
10、优选的,所述固定安装组件包括通过螺栓固定安装在固定座外表面的固定环,且所述固定座贯穿于固定环的内部。
11、优选的,所述加固支撑组件包括焊接固定在固定环边缘处的加强固定杆,所述加强固定杆的端部焊接固定有固定板。
12、与现有技术相比,本实用新型的有益效果是:
13、通过设计加强支撑防护机构,可以当机械手对工件夹持固定转移时,且在紧压夹板嵌入工件的内部通过气缸挤压时,紧压夹板挤压时带动加强支撑杆发生倾斜度,并加强支撑杆发生倾斜度时,由紧压弹簧发生形变通过滑块与连接块对加强支撑杆始终紧压支撑,且便于紧压夹板在挤压时通过加强支撑杆对紧压夹板的底端加强支撑,夹持工件时不易发生变形,同时转移时机械臂三的表面受到触碰,由弹性缓冲环发生形变对防护筒弹性缓冲,且便于对机械臂三的表面缓冲防护,提高机械手在夹取工件转移打磨处理时加强支撑固定性与防护使用效果。
技术特征:
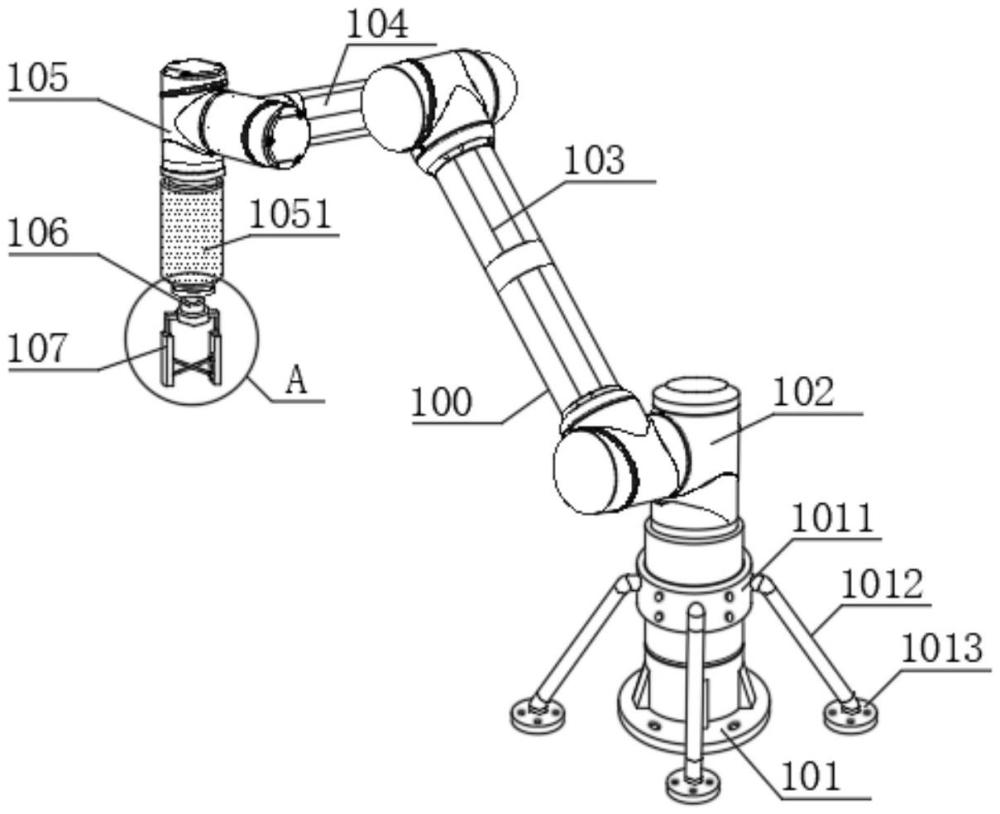
1.一种转移机械手,包括机械手主体(100),所述机械手主体(100)包括固定座(101)、机械臂三(105)、连接座(106)与紧压夹板(107),所述连接座(106)通过电机安装在机械臂三(105)的底端,所述紧压夹板(107)通过气缸安装在连接座(106)的两侧,其特征在于:所述机械手主体(100)上还设置有:
2.根据权利要求1所述的一种转移机械手,其特征在于:所述固定座(101)的上表面转动连接有旋转座(102),所述旋转座(102)的端部设置有机械臂一(103),所述机械臂一(103)的端部设置有机械臂二(104),且所述机械臂二(104)与所述机械臂三(105)转动连接。
3.根据权利要求1所述的一种转移机械手,其特征在于:所述弹性连接组件包括开设在紧压夹板(107)内部的滑槽(1071),所述滑槽(1071)的内部两端滑动连接有滑块(1074),两个所述滑块(1074)的连接处焊接固定有紧压弹簧(1075),所述滑块(1074)的端部位于紧压夹板(107)的表面焊接固定有连接块(1072)。
4.根据权利要求3所述的一种转移机械手,其特征在于:两个所述滑块(1074)相互对称设置,且两个所述滑块(1074)通过所述紧压弹簧(1075)弹性连接。
5.根据权利要求3所述的一种转移机械手,其特征在于:所述加强支撑组件包括通过连接销安装在两个连接块(1072)连接处的加强支撑杆(1073),且两个所述加强支撑杆(1073)交叉设置,两个所述加强支撑杆(1073)的中间位置处通过连接销活动连接。
6.根据权利要求1所述的一种转移机械手,其特征在于:所述缓冲防护组件包括设置在机械臂三(105)外表面的防护筒(1051),所述防护筒(1051)的内表面设置有弹性缓冲环(1053),所述弹性缓冲环(1053)的外表面与内表面分别通过螺钉固定安装有固定筒b(1052)与固定筒c(1054),且所述固定筒c(1054)与所述机械臂三(105)的外表面通过螺钉固定连接,所述固定筒b(1052)与防护筒(1051)的内表面通过螺钉固定连接。
7.根据权利要求1所述的一种转移机械手,其特征在于:所述固定安装组件包括通过螺栓固定安装在固定座(101)外表面的固定环(1011),且所述固定座(101)贯穿于固定环(1011)的内部。
8.根据权利要求7所述的一种转移机械手,其特征在于:所述加固支撑组件包括焊接固定在固定环(1011)边缘处的加强固定杆(1012),所述加强固定杆(1012)的端部焊接固定有固定板(1013)。
技术总结
本技术公开了一种转移机械手,包括机械手主体,所述机械手主体包括固定座、机械臂三、连接座与紧压夹板,所述连接座通过电机安装在机械臂三的底端,所述紧压夹板通过气缸安装在连接座的两侧;通过设计加强支撑防护机构,可以当机械手对工件夹持固定转移时,且在紧压夹板嵌入工件的内部通过气缸挤压时,紧压夹板挤压时带动加强支撑杆发生倾斜度,并加强支撑杆发生倾斜度时,由紧压弹簧发生形变通过滑块与连接块对加强支撑杆始终紧压支撑,且便于紧压夹板在挤压时通过加强支撑杆对紧压夹板的底端加强支撑,夹持工件时不易发生变形,同时转移时机械臂三的表面受到触碰,由弹性缓冲环发生形变对防护筒弹性缓冲。
技术研发人员:郜同顺,胡阿敏,侍路路,李涛
受保护的技术使用者:费默勒智能装备(无锡)有限公司
技术研发日:20230814
技术公布日:2024/4/22
- 还没有人留言评论。精彩留言会获得点赞!