一种带有颜色识别功能的工业机器人末端执行器的制作方法
本技术涉及工业机器人末端执行器,具体领域为一种带有颜色识别功能的工业机器人末端执行器。
背景技术:
1、工业机器人在制造业中有很多的应用场景,例如利用工业机器人进行货物的搬运、码垛、焊接和喷涂作业等。其中很多应用场合是需要用到对物品颜色识别来进行产品的分类、加工和装配等操作,经检索,中国专利授权公告号cn215749223u,公开了一种带有颜色识别功能的工业机器人末端执行器,通过设置颜色传感器,实现了对所吸取物品颜色的识别,避免了现有技术中通过算法实现颜色识别时价格昂贵、维修难度大等缺陷;但上述技术方案中,以吸取的方式进行颜色识别,拖慢识别速度,由此可知现有末端执行器灵活性有待提升,为此提出一种新型带有颜色识别功能的工业机器人末端执行器。
技术实现思路
1、本实用新型的目的在于提供一种带有颜色识别功能的工业机器人末端执行器,以解决上述背景技术中提出的问题。
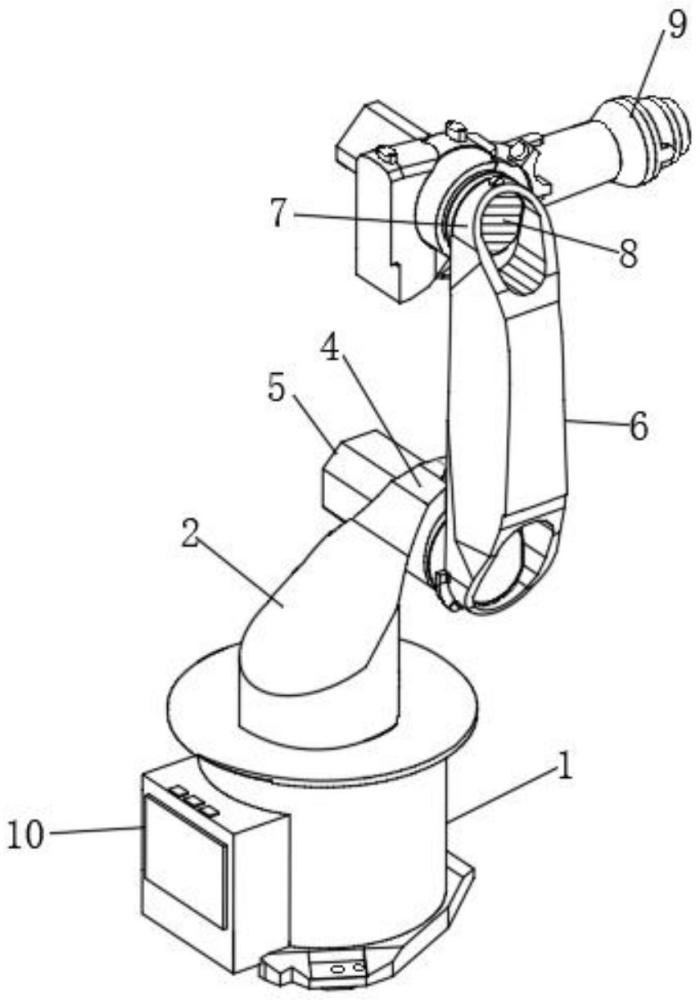
2、为实现上述目的,本实用新型提供如下技术方案:一种带有颜色识别功能的工业机器人末端执行器,包括连接座,所述连接座上转动连接有第一转动臂,所述连接座的内部为空腔结构,所述连接座的空腔内设置有第一电机,所述第一电机的输出端与所述第一转动臂相连接,通过所述第一电机工作,带动所述第一转动臂转动,所述第一转动臂的端部一体成型有第一固定环,所述第一固定环内固定安装有第二电机,所述第一固定环对所述第二电机起到固定作用,所述第二电机的输出端固定连接有第二转动臂,通过所述第二电机工作,可带动所述第二转动臂转动,所述第二转动臂的端部一体成型有第二固定环,所述第二固定环内固定安装有第三电机,所述第二固定环对所述第三电机起到固定作用,所述第三电机的输出端固定连接有颜色传感器载具,所述颜色传感器载具上设置有颜色传感器,通过所述第三电机工作,带动所述颜色传感器载具转动,末端执行器整体具有三段可转动的转动臂,末端执行器上的颜色传感器可进行水平及大小范围的竖直位移,活动角度多样且灵活,末端执行器上的颜色传感器可随三段转动臂的转动移动至周侧任意位置,与多位置物品接触并对多位置的物品颜色进行逐一识别,将识别数据传输至工业机器人,由工业机器人进行进一步处理。
3、优选的,所述连接座上设置有操控台,所述操控台内设置有与颜色传感器电连接的微处理器,所述操控台上设置有用于控制所述第一电机、所述第二电机和所述第三电机工作的操作键,微处理器控制颜色传感器对物品的颜色进行识别,并将物品的rgb数据送入控制电路的微处理器中,微处理器接收到颜色传感器的rgb数据之后,驱动rgb灯珠发出相应颜色的光,同时将rgb数据发送至工业机器人,由工业机器人进行进一步处理。
4、优选的,所述连接座包括连接板,所述连接板上固定连接有外壳,所述连接板上开设有装配孔,所述外壳内转动连接有转板件,所述第一电机的输出端通过转板件与所述第一转动臂相连接,所述连接板与工业机器人主体部分连接,使末端执行器整体固定在工业机器人上。
5、优选的,所述转板件包括转动筒,所述外壳的内侧壁固定连接有环形凸起,所述转动筒的外侧壁开设有与所述环形凸起配合使用的环形凹槽,所述转动筒的内侧固定连接有第一固定板,所述第一电机的输出端与所述固定板固定连接,所述环形凸起和所述环形凹槽的设置增加所述转动筒在所述外壳内侧的转动顺滑性。
6、优选的,所述转动筒的上端且位于所述外壳的外部固定连接有第二固定板,所述第一转动臂与所述第二固定板固定连接,所述第二固定板便于与所述第一转动臂固定连接。
7、与现有技术相比,本实用新型的有益效果是:
8、通过第一电机工作,带动第一转动臂转动,第一转动臂的端部一体成型有第一固定环,第一固定环内固定安装有第二电机,第一固定环对第二电机起到固定作用,第二电机的输出端固定连接有第二转动臂,通过第二电机工作,可带动第二转动臂转动,第二转动臂的端部一体成型有第二固定环,第二固定环内固定安装有第三电机,第二固定环对第三电机起到固定作用,第三电机的输出端固定连接有颜色传感器载具,颜色传感器载具上设置有颜色传感器,通过第三电机工作,带动颜色传感器载具转动,末端执行器整体具有三段可转动的转动臂,末端执行器上的颜色传感器可进行水平及大小范围的竖直位移,活动角度多样且灵活,末端执行器上的颜色传感器可随三段转动臂的转动移动至周侧任意位置,与多位置物品接触并对多位置的物品颜色进行逐一识别,识别速度具有较大程度上的提升。
技术特征:
1.一种带有颜色识别功能的工业机器人末端执行器,其特征在于:包括连接座(1),所述连接座(1)上转动连接有第一转动臂(2),所述连接座(1)的内部为空腔结构,所述连接座(1)的空腔内设置有第一电机(3),所述第一电机(3)的输出端与所述第一转动臂(2)相连接,所述第一转动臂(2)的端部一体成型有第一固定环(4),所述第一固定环(4)内固定安装有第二电机(5),所述第二电机(5)的输出端固定连接有第二转动臂(6),所述第二转动臂(6)的端部一体成型有第二固定环(7),所述第二固定环(7)内固定安装有第三电机(8),所述第三电机(8)的输出端固定连接有颜色传感器载具(9),所述颜色传感器载具(9)上设置有颜色传感器。
2.根据权利要求1所述的一种带有颜色识别功能的工业机器人末端执行器,其特征在于:所述连接座(1)上设置有操控台(10),所述操控台(10)内设置有与颜色传感器电连接的微处理器,所述操控台(10)上设置有用于控制所述第一电机(3)、所述第二电机(5)和所述第三电机(8)工作的操作键。
3.根据权利要求2所述的一种带有颜色识别功能的工业机器人末端执行器,其特征在于:所述连接座(1)包括连接板(101),所述连接板(101)上固定连接有外壳(102),所述连接板(101)上开设有装配孔,所述外壳(102)内转动连接有转板件,所述第一电机(3)的输出端通过转板件与所述第一转动臂(2)相连接。
4.根据权利要求3所述的一种带有颜色识别功能的工业机器人末端执行器,其特征在于:所述转板件包括转动筒(103),所述外壳(102)的内侧壁固定连接有环形凸起(104),所述转动筒(103)的外侧壁开设有与所述环形凸起(104)配合使用的环形凹槽(105),所述转动筒(103)的内侧固定连接有第一固定板(106),所述第一电机(3)的输出端与所述第一固定板(106)固定连接。
5.根据权利要求4所述的一种带有颜色识别功能的工业机器人末端执行器,其特征在于:所述转动筒(103)的上端且位于所述外壳(102)的外部固定连接有第二固定板(107),所述第一转动臂(2)与所述第二固定板(107)固定连接。
技术总结
本技术公开了一种带有颜色识别功能的工业机器人末端执行器,包括连接座,通过第一电机工作,带动第一转动臂转动,第一固定环对第二电机起到固定作用,通过第二电机工作,可带动第二转动臂转动,第二固定环对第三电机起到固定作用,第三电机的输出端固定连接有颜色传感器载具,颜色传感器载具上设置有颜色传感器,通过第三电机工作,带动颜色传感器载具转动,末端执行器整体具有三段可转动的转动臂,末端执行器上的颜色传感器可进行水平及大小范围的竖直位移,活动角度多样且灵活,末端执行器上的颜色传感器可随三段转动臂的转动移动至周侧任意位置,与多位置物品接触并对多位置的物品颜色进行逐一识别,识别速度具有较大程度上的提升。
技术研发人员:李慧东,徐林东,赵长梅,李贺,庞玲玲
受保护的技术使用者:昆明冶金高等专科学校
技术研发日:20230816
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!