自动切割排列收集一体机的制作方法
本技术属于丸棒加工,特别是涉及自动切割排列收集一体机。
背景技术:
1、丸棒在加工成型后被机械手取出并放置到切割机的治具上,随后治具将其带动至切割位置,通过传感器检测到产品到位后,切割机将丸棒上的废料盘去除,使得废料盘经由出料斗滑落至塑料袋中,随后通过机械手将切割后的丸棒放置于专用治具中即可。
2、在对丸棒加工时产生的废料小盘进行收集时需要将塑料袋与出料斗之间通过橡皮筋进行扎固,避免废料小盘直接从出料斗中滑出时出现未进入塑料袋的情况发生,此过程中需要人工手持橡皮筋对塑料袋进行定位,较为不便,因此需要一种自动切割排列收集一体机,可直接将塑料袋与出料斗之间进行固定,提高塑料袋固定与拆卸时的便捷性。
技术实现思路
1、本实用新型的目的是提供自动切割排列收集一体机,通过滑料斗两侧的转杆一转动并带动曲杆和夹棒摆动,使得夹棒将塑料袋夹持固定在滑料斗的表面,可直接将塑料袋与出料斗之间进行固定,提高塑料袋固定与拆卸时的便捷性,以解决上述背景技术所提出的技术问题。
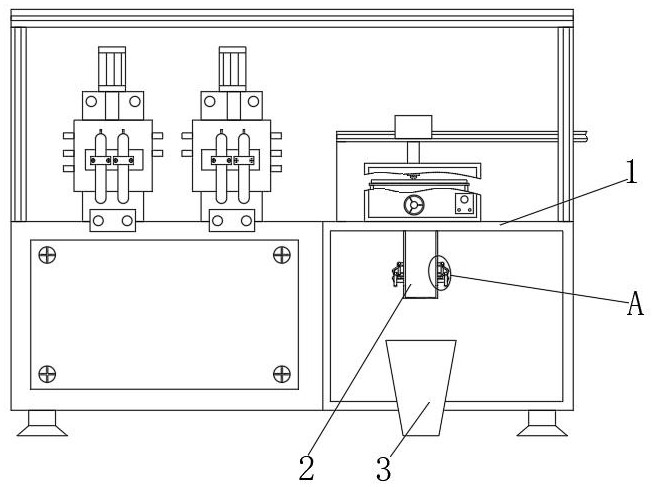
2、本实用新型解决上述技术问题的技术方案如下:自动切割排列收集一体机,其包括机床:所述机床上连通有滑料斗,所述滑料斗的下方放置有料桶,所述滑料斗的两侧均通过转轴转动连接有转杆一,所述滑料斗的后侧通过转轴转动连接有转杆二,所述转杆一的后端与转杆二的两端分别固定连接有锥齿轮一和锥齿轮二,所述转杆一的表面焊接有两个曲杆,两个曲杆的底端共同焊接有夹棒,所述滑料斗的后侧固定安装有气缸,所述气缸的输出端通过法兰固定连接有齿条,所述转杆二的表面通过螺栓固定连接有齿轮。
3、优选的,所述夹棒的表面黏贴有夹套,所述夹套为橡胶套。
4、优选的,所述锥齿轮一和锥齿轮二之间相啮合,所述齿条与齿轮之间相啮合。
5、优选的,所述齿条的表面滑动连接有限位框,所述限位框与滑料斗之间固定连接。
6、优选的,所述滑料斗的后侧通过螺栓固定连接有罩壳,所述罩壳位于锥齿轮一和锥齿轮二的外侧。
7、1、本实用新型的有益效果是:本实用新型通过气缸带动齿条移动,使得齿条通过齿轮带动转杆二转动,继而转杆二通过锥齿轮二带动锥齿轮一转动,进而锥齿轮一通过转杆一和曲杆带动夹棒摆动并将塑料袋夹持固定在滑料斗的外侧,即可达到对塑料袋与滑料斗之间夹持固定,避免橡皮筋的使用,提高了塑料袋固定与拆卸时便捷性的目的。
8、2、本实用新型通过夹套的设置,对夹棒的表面进行垫护,避免夹棒直接对塑料袋进行夹持时造成后者破损的情况发生。
9、3、本实用新型通过限位框的设置,对齿条的移动进行限位,避免齿条在移动过程中出现晃动的情况发生。
10、4、本实用新型通过罩壳的设置,对锥齿轮一和锥齿轮二的啮合处进行罩护,避免锥齿轮一和锥齿轮二的啮合处咬合到外物的情况发生,进而提高了锥齿轮一和锥齿轮二转动的平顺性。
技术特征:
1.自动切割排列收集一体机,其特征在于,包括机床(1):所述机床(1)上连通有滑料斗(2),所述滑料斗(2)的下方放置有料桶(3),所述滑料斗(2)的两侧均通过转轴转动连接有转杆一(4),所述滑料斗(2)的后侧通过转轴转动连接有转杆二(5),所述转杆一(4)的后端与转杆二(5)的两端分别固定连接有锥齿轮一(6)和锥齿轮二(7),所述转杆一(4)的表面焊接有两个曲杆(8),两个曲杆(8)的底端共同焊接有夹棒(9),所述滑料斗(2)的后侧固定安装有气缸(11),所述气缸(11)的输出端通过法兰固定连接有齿条(12),所述转杆二(5)的表面通过螺栓固定连接有齿轮(13)。
2.根据权利要求1所述的自动切割排列收集一体机,其特征在于,所述夹棒(9)的表面黏贴有夹套(10),所述夹套(10)为橡胶套。
3.根据权利要求2所述的自动切割排列收集一体机,其特征在于,所述锥齿轮一(6)和锥齿轮二(7)之间相啮合,所述齿条(12)与齿轮(13)之间相啮合。
4.根据权利要求3所述的自动切割排列收集一体机,其特征在于,所述齿条(12)的表面滑动连接有限位框(14),所述限位框(14)与滑料斗(2)之间固定连接。
5.根据权利要求4所述的自动切割排列收集一体机,其特征在于,所述滑料斗(2)的后侧通过螺栓固定连接有罩壳(15),所述罩壳(15)位于锥齿轮一(6)和锥齿轮二(7)的外侧。
技术总结
本技术公开了自动切割排列收集一体机,其包括机床:所述机床上连通有滑料斗,所述滑料斗的下方放置有料桶,所述滑料斗的两侧均通过转轴转动连接有转杆一,所述滑料斗的后侧通过转轴转动连接有转杆二,所述转杆一的后端与转杆二的两端分别固定连接有锥齿轮一和锥齿轮二,所述转杆一的表面焊接有两个曲杆。本技术通过气缸带动齿条移动,使得齿条通过齿轮带动转杆二转动,继而转杆二通过锥齿轮二带动锥齿轮一转动,进而锥齿轮一通过转杆一和曲杆带动夹棒摆动并将塑料袋夹持固定在滑料斗的外侧,即可达到对塑料袋与滑料斗之间夹持固定,避免橡皮筋的使用,提高了塑料袋固定与拆卸时便捷性的目的。
技术研发人员:李延栋,杨连永,张亮,苏东升,宫洪波
受保护的技术使用者:大连精工技研有限公司
技术研发日:20230816
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!