一种协作机器人末端工具的制作方法
本技术属于配电柜巡检机器人,尤其涉及一种协作机器人末端工具。
背景技术:
1、为避免人工检测配电柜易导致人员受到伤害的问题,现在电厂都采用配电柜巡检机器人对配电柜进行检测。授权公告号为cn217317989u、授权公告日为2022年08月30日的实用新型专利公开了“一种机械臂及巡检机器人”,该巡检机器人将局放检测器和操作器集成在机械臂的活动端,通过视觉定位器完成对局放检测器检测局放时的定位和操作器操作断路器时的定位,使得一个巡检机器人既可以对配电柜执行断路器开关操作,又可以对配电柜进行局部放电检测,从而满足配电间不同功能的需求。但该机器人末端执行器裸露在外,没有任何保护结构对末端执行器进行保护,长时间裸露会影响其使用寿命,而且该机器人操作时无法控制机械臂及末端执行器与检测的配电柜之间的安全距离,无法避免在操作失误时机械臂及末端执行器与检测的配电柜相互磕碰导致零件损伤的情况,影响工作效率,造成不必要的损失。因此,需要对现有的末端执行器结构进行改进,以克服现有末端执行器存在的上述问题。
技术实现思路
1、本实用新型的目的是提供一种协作机器人末端工具,用以解决现有配电柜巡检机器人末端执行器外侧未设置保护结构及操作时无法控制机械臂及末端执行器与检测的配电柜之间的安全距离的问题。
2、为实现上述目的,本实用新型采取的技术方案如下:
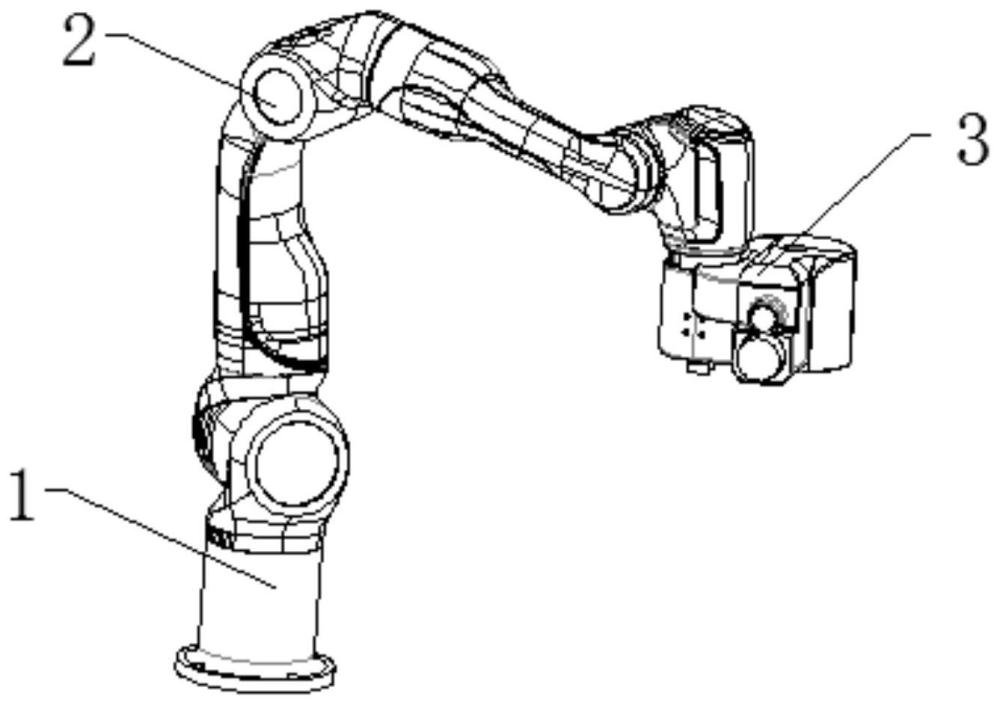
3、一种协作机器人末端工具,包括安装座、机械臂和执行器,执行器包括保护罩、安装法兰、电动夹爪、安装架、距离传感器、工业相机、局部传感器、视觉传感器和光源,机械臂固定端固定在安装座上,电动夹爪与安装法兰下表面一端固定连接,安装架固定在安装法兰下表面中部,距离传感器固定在安装架与电动夹爪相邻的一侧,工业相机固定在安装架与电动夹爪相背的一侧,光源固定在安装架上并位于工业相机下端,局部传感器和视觉传感器均固定在保护罩内,且局部传感器和视觉传感器设置在保护罩侧壁上相对应的通孔内,机械臂活动端穿过保护罩与安装法兰上表面一端固定连接。
4、与现有技术相比,本实用新型的有益效果是:
5、1、本实用新型的协作机器人末端工具,由于设置有保护罩,局部传感器和视觉传感器均设在保护罩内,保护罩对局部传感器和视觉传感器起到保护作用,可以保证局部传感器和视觉传感器的使用寿命,也可以在操作失误时有效保护局部传感器和视觉传感器受到磕碰伤害,提高使用寿命。
6、2、本实用新型的协作机器人末端工具,由于设置有距离传感器,操作时可以控制机械臂及执行器与检测的配电柜之间的安全距离,当机械臂及执行器与检测的配电柜之间距离较近时,距离传感器发出信号,避免机械臂及执行器与检测的配电柜相互磕碰导致零件损伤的情况,提高工作效率,减少不必要的损失。
7、3、本实用新型的协作机器人末端工具,由于设置有定位传感器、局部传感器和距离传感器,三种传感器实现各自功能,使用时三种传感器互相配合,可以有效提高整个末端工具的工作效率。
8、4、本实用新型的协作机器人末端工具,由于执行器结构简单,安装方便,生产成本低,并且功能多样,具有适用性强,适用面广的特点。
技术特征:
1.一种协作机器人末端工具,其特征在于:包括安装座(1)、机械臂(2)和执行器(3),执行器(3)包括保护罩(4)、安装法兰(5)、电动夹爪(7)、安装架(9)、距离传感器(10)、工业相机(11)、局部传感器(12)、视觉传感器(13)和光源(14),机械臂(2)固定端固定在安装座(1)上,电动夹爪(7)与安装法兰(5)下表面一端固定连接,安装架(9)固定在安装法兰(5)下表面中部,距离传感器(10)固定在安装架(9)与电动夹爪(7)相邻的一侧,工业相机(11)固定在安装架(9)与电动夹爪(7)相背的一侧,光源(14)固定在安装架(9)上并位于工业相机(11)下端,局部传感器(12)和视觉传感器(13)均固定在保护罩(4)内,且局部传感器(12)和视觉传感器(13)设置在保护罩(4)侧壁上相对应的通孔内,机械臂(2)活动端穿过保护罩(4)与安装法兰(5)上表面一端固定连接。
2.根据权利要求1所述的一种协作机器人末端工具,其特征在于:电动夹爪(7)通过夹爪安装板(6)与安装法兰(5)下表面一端固定连接,电动夹爪(7)的活动端安装有夹块(8)。
3.根据权利要求1所述的一种协作机器人末端工具,其特征在于:安装架(9)包括安装板(19)、安装板金件一(16)、安装板金件二(17)和安装板金件三(18),安装板(19)上端与安装法兰(5)下表面中部固定连接,安装板(19)与电动夹爪(7)相邻的一侧板面固定有安装板金件一(16),安装板(19)与电动夹爪(7)相背的一侧板面由上至下分别固定有安装板金件二(17)和安装板金件三(18)。
4.根据权利要求3所述的一种协作机器人末端工具,其特征在于:安装板金件一(16)与距离传感器(10)固定连接,安装板金件二(17)与工业相机(11)固定连接,安装板金件三(18)与光源(14)固定连接。
5.根据权利要求1所述的一种协作机器人末端工具,其特征在于:光源(14)为环形光源。
6.根据权利要求5所述的一种协作机器人末端工具,其特征在于:工业相机(11)的镜头置于光源(14)内。
7.根据权利要求1所述的一种协作机器人末端工具,其特征在于:视觉传感器(13)置于局部传感器(12)上方,视觉传感器(13)的传感端与保护罩(4)对应的通孔外侧平齐,局部传感器(12)的传感端穿出保护罩(4)对应的通孔置于保护罩(4)外部。
技术总结
一种协作机器人末端工具,属于配电柜巡检机器人技术领域。机械臂固定端固定在安装座上,电动夹爪与安装法兰下表面一端固定连接,安装架固定在安装法兰下表面中部,距离传感器固定在安装架与电动夹爪相邻的一侧,工业相机固定在安装架与电动夹爪相背的一侧,光源固定在安装架上并位于工业相机下端,局部传感器和视觉传感器均固定在保护罩内,且局部传感器和视觉传感器设置在保护罩侧壁上相对应的通孔内,机械臂活动端穿过保护罩与安装法兰上表面一端固定连接,本技术的协作机器人末端工具可以解决现有配电柜巡检机器人末端执行器外侧未设置保护结构及操作时无法控制机械臂及末端执行器与检测的配电柜之间的安全距离的问题。
技术研发人员:李莫,尹相辉,邵文迪
受保护的技术使用者:思灵机器人科技(哈尔滨)有限公司
技术研发日:20230816
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!