本技术属于蛇形机器人领域,具体涉及一种模块化蛇形机器人。
背景技术:
1、蛇形机器人的设计灵感主要来源于自然界的蛇。它的主要特点是由多个运动模块连接而成,每个模块可以独立旋转和弯曲。这种设计使得蛇形机器人在处理复杂地形和环境时具有优势,因为它可以模拟蛇的运动方式,如横向滑动、螺旋滑动等。蛇形机器人的关键技术主要包括:运动控制系统、传感器技术、动力系统以及运动模块的设计。运动控制系统负责机器人的运动和导航,传感器技术用于感知环境和自身状态,动力系统为机器人提供动力,而运动模块的设计则直接影响到机器人的行动能力和适应性。
2、尽管蛇形机器人在处理复杂环境和地形上表现出较强的能力,但现有的技术仍存在一些问题。主要是运动模块之间的连接机构结构复杂,这导致了整体的自由度较低,不够灵活。蛇形机器人由多个运动模块组成,这些模块通过复杂的连接机构相互连接。这种设计在一定程度上增加了机器人的结构复杂度,并可能影响其可维护性和耐用性。而且虽然每个运动模块都可以独立旋转和弯曲,但由于连接机构的限制,整体的自由度并不高,导致灵活性不足,从而限制蛇形机器人在处理特定复杂环境时的能力,使其无法适应更复杂的地形。
3、因此,基于以上现有技术中的一些情况,本申请进行了进一步的设计和改进。
技术实现思路
1、针对以上现有技术中的不足,本实用新型提供了一种模块化蛇形机器人,运动模块之间的连接结构转动灵活,自由度高,且结构简单,有利于拆装和后续维护。
2、为了解决上述技术问题,本实用新型通过下述技术方案得以解决。
3、一种模块化蛇形机器人,包括若干运动模块,所述运动模块两侧分别装配有第一连接座和第二连接座,所述第一连接座和第二连接座通过连接轴铰接。所述运动模块上设置有轴承套,所述轴承套内装设有转动轴,所述转动轴与第一连接座固定装配。所述第一连接座能够转动,使得第一连接座和第二连接座之间的连接具有高自由度,保证蛇形机器人能够紧贴地面移动,且结构简单,有利于拆装,方便后续更换维护。
4、作为本实用新型所述一种模块化蛇形机器人的优选实施方案,具体地,所述第一连接座两侧设置有第一铰接支脚,所述第二连接座两侧设置有第二铰接支脚,所述连接轴连接第一铰接支脚和第二铰接支脚。结构简单,转动灵活。
5、作为本实用新型所述一种模块化蛇形机器人的优选实施方案,具体地,所述第一铰接支脚和第二铰接支脚设置为:所述第一铰接支脚位于第二铰接支脚之间,所述第二铰接支脚之间的最大间距小于运动模块的最大直径,保证运动模块之间连接可靠,并避免第二铰接支脚与地面摩擦受损。
6、作为本实用新型所述一种模块化蛇形机器人的优选实施方案,具体地,所述第二铰接支脚的端部设置为:所述第一铰接支脚和相邻运动第二铰接支脚垂直时,所述第二铰接支脚的端部不超过第一铰接支脚所在的运动模块的最大直径面,避免蛇形机器人弯曲扭动时第二铰接支脚的端部凸出与地面抵接导致受损。
7、作为本实用新型所述一种模块化蛇形机器人的优选实施方案,具体地,所述运动模块包括麦克纳姆轮,所述麦克纳姆轮的一侧设置有装配座,所述第二连接座与装配座转动装配,结构简单并保证蛇形机器人的运动灵活度。
8、作为本实用新型所述一种模块化蛇形机器人的优选实施方案,具体地,所述第二连接座内设置有驱动电机,所述驱动电机连接有驱动齿轮,所述装配座上设置有与驱动齿轮啮合连接的内齿圈。
9、作为本实用新型所述一种模块化蛇形机器人的优选实施方案,具体地,相邻的运动模块的麦克纳姆轮上的辊子的倾斜方向呈镜像相对设置,使得蛇形机器人能够在空间内进行弯曲、蠕动等动作。
10、作为本实用新型所述一种模块化蛇形机器人的优选实施方案,具体地,所述第一连接座上设置有装配槽,所述转动轴穿过装配槽并在装配槽处连接装配有固定块,用户可以通过卸载固定块将麦克纳姆轮和第一连接座的连接断开,拆卸简单方便,方便后续更换维护。
11、作为本实用新型所述一种模块化蛇形机器人的优选实施方案,具体地,还包括头部和尾部,所述头部和尾部上均设置有反射模块和避障感应模块,使得蛇形机器人首尾可以调换,有利于蛇形机器人在复杂环境内的运动。
12、与现有技术相比,本实用新型具有以下有益效果:运动模块之间的连接结构转动灵活,自由度高,且结构简单,有利于拆装和后续维护。
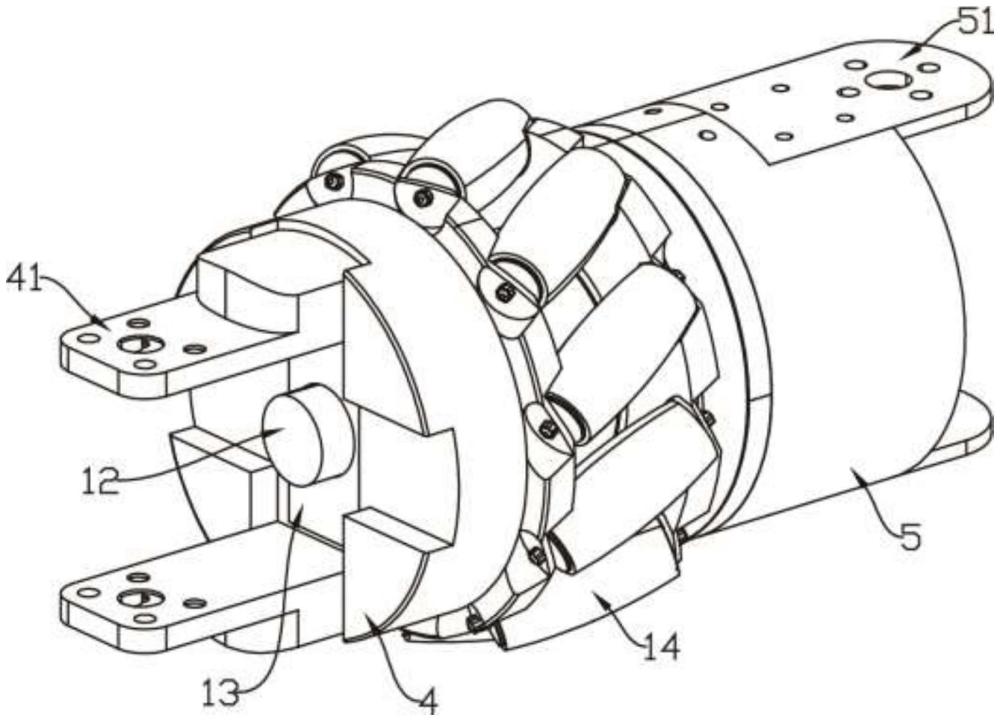
技术特征:1.一种模块化蛇形机器人,其特征在于,包括若干运动模块(1),所述运动模块(1)两侧分别装配有第一连接座(4)和第二连接座(5),所述第一连接座(4)和第二连接座(5)通过连接轴(6)铰接;所述运动模块(1)上设置有轴承套(11),所述轴承套(11)内装设有转动轴(12),所述转动轴(12)与第一连接座(4)固定装配。
2.根据权利要求1所述的一种模块化蛇形机器人,其特征在于,所述第一连接座(4)两侧设置有第一铰接支脚(41),所述第二连接座(5)两侧设置有第二铰接支脚(51),所述连接轴(6)连接第一铰接支脚(41)和第二铰接支脚(51)。
3.根据权利要求2所述的一种模块化蛇形机器人,其特征在于,所述第一铰接支脚(41)和第二铰接支脚(51)设置为:所述第一铰接支脚(41)位于第二铰接支脚(51)之间,所述第二铰接支脚(51)之间的最大间距小于运动模块(1)的最大直径。
4.根据权利要求2所述的一种模块化蛇形机器人,其特征在于,所述第二铰接支脚(51)的端部设置为:所述第一铰接支脚(41)和相邻运动第二铰接支脚(51)垂直时,所述第二铰接支脚(51)的端部不超过第一铰接支脚(41)所在的运动模块(1)的最大直径面。
5.根据权利要求1所述的一种模块化蛇形机器人,其特征在于,所述运动模块(1)包括麦克纳姆轮(14),所述麦克纳姆轮(14)的一侧设置有装配座(15),所述第二连接座(5)与装配座(15)转动装配。
6.根据权利要求5所述的一种模块化蛇形机器人,其特征在于,所述第二连接座(5)内设置有驱动电机(52),所述驱动电机(52)连接有驱动齿轮(53),所述装配座(15)上设置有与驱动齿轮(53)啮合连接的内齿圈(16)。
7.根据权利要求5所述的一种模块化蛇形机器人,其特征在于,相邻的运动模块(1)的麦克纳姆轮(14)上的辊子的倾斜方向呈镜像相对设置。
8.根据权利要求1所述的一种模块化蛇形机器人,其特征在于,所述第一连接座(4)上设置有装配槽,所述转动轴(12)穿过装配槽并在装配槽处连接装配有固定块(13)。
9.根据权利要求1所述的一种模块化蛇形机器人,其特征在于,还包括头部(2)和尾部(3),所述头部(2)和尾部(3)上均设置有反射模块和避障感应模块。
技术总结一种模块化蛇形机器人,包括若干运动模块(1),所述运动模块(1)两侧分别装配有第一连接座(4)和第二连接座(5),所述第一连接座(4)和第二连接座(5)通过连接轴(6)铰接;所述运动模块(1)上设置有轴承套(11),所述轴承套(11)内装设有转动轴(12),所述转动轴(12)与第一连接座(4)固定装配。与现有技术相比,本技术具有以下有益效果:运动模块(1)之间的连接结构转动灵活,自由度高,且结构简单,有利于拆装和后续维护。
技术研发人员:陈柏翰,蒋雯雯,谢质彬
受保护的技术使用者:宁波大学
技术研发日:20230816
技术公布日:2024/3/24