可移动式越障带电作业机器人的制作方法
本技术属于机器人领域,具体地说是可移动式越障带电作业机器人。
背景技术:
1、人工带电操作需要操作人员在高压、强电磁场等极端危险环境下进行接线、解线等手工操作,劳动强度大,精神高度紧张,不仅给带电作业人员带来人身危险,而且完成作业效率低下。
2、目前市场上已经研发出来多种类型的带电作业机器人,但工作时仍然需要工作人员在旁边进行操作,并且由于带电机器人在特殊环境下,如沙地,山区,泥地等,会造成带电机器人行动不方便,或者无法行动时,使带电机器人对有故障的电力线路无法进行观察,从而无法提醒工作人员线路在哪里出现故障,影响工作效率。
3、综上,因此本实用新型提供了可移动式越障带电作业机器人,以解决上述问题。
技术实现思路
1、为了解决上述技术问题,本实用新型提供可移动式越障带电作业机器人,以解决现有技术中市场上已经研发出来多种类型的带电作业机器人,但工作时仍然需要工作人员在旁边进行操作,并且由于带电机器人在特殊环境下,如沙地,山区,泥地等,会造成带电机器人行动不方便,或者无法行动时,使带电机器人对有故障的电力线路无法进行观察,从而无法提醒工作人员线路在哪里出现故障,影响工作效率等问题。
2、可移动式越障带电作业机器人,包括机体,所述机体包括摄像头,所述机体安装有两侧安装有多组虹膜机构,所述虹膜机构包括第一固定板,所述第一固定板一侧连接有多组固定柱,所述固定柱一端连接有第二固定板,所述第二固定板一端两侧连接有液压机,所述液压机一端连接有伸缩杆,所述伸缩杆一端连接有移动块,所述移动块内侧一端连接有第一转动盘,所述第一转动盘内部一侧连接有多组支撑架,所述支撑架一侧与第一固定板内侧贴合连接。
3、作为本实用新型的一种技术方案,所述第一转动盘外部一侧连接有第二转动盘,所述第二转动盘中间位置安装有螺栓,所述螺栓一端与第一固定板内侧相连接,所述机体两端两侧连接有第一转动杆,所述液压机一端安装有六角螺栓,所述六角螺栓一端与第二固定板外侧相连接。
4、作为本实用新型的一种技术方案,所述第一转动杆一端连接有轮胎,所述轮胎两端连接有限位板,所述轮胎侧面贴合连接有履带。
5、作为本实用新型的一种技术方案,所述机体两侧中间位置连接有固定器,所述固定器一侧安装有多组固定架,所述固定架一端连接有第二转动杆,所述第二转动杆一端连接有辅助轮,所述辅助轮一端连接有第三转动杆,所述第三转动杆一端与第一固定板内侧相连接,所述辅助轮一侧与履带内侧贴合连接。
6、作为本实用新型的一种技术方案,所述机体一端两侧连接有固定杆,所述固定杆内部安装有弹簧,所述弹簧一端连接有限位器,所述机体顶部一侧安装有收纳箱,所述收纳箱顶部贴合连接有挡板,所述挡板一端贯穿收纳箱连接有把手。
7、作为本实用新型的一种技术方案,所述机体顶部一侧安装有限位柱,所述限位柱一侧连接有多功能转动杆,所述多功能转动杆底端连接有摄像头,所述限位柱通过多功能转动杆连接有摄像头。
8、与现有技术相比,本实用新型具有如下有益效果:
9、本实用新型通过液压机带动伸缩杆进行伸缩,从而带动移动块进行移动,通过移动块带动第一转动盘进行移动,从而带动支撑架进行移动,通过支撑架可以加强辅助轮对地面的摩擦力,通过支撑架提高机体在泥地里的抓地力,不会让机体陷入到泥地里,从而影响到工作进度,同时轮胎与辅助轮的高度不同,从而提高了履带前端的高度,使机体可以更好的翻越障碍,同时机体两侧的固定杆、弹簧以及限位器可以防止机体发生翻滚,防止对机体造成破坏,本实用新型通过虹膜机构提高了机体在特殊环境的行动能力,从而提高了工作效率。
技术特征:
1.可移动式越障带电作业机器人,包括机体(1),所述机体(1)包括摄像头(19),其特征在于:所述机体(1)安装有两侧安装有多组虹膜机构,所述虹膜机构包括第一固定板(7),所述第一固定板(7)一侧连接有多组固定柱(701),所述固定柱(701)一端连接有第二固定板(9),所述第二固定板(9)一端两侧连接有液压机(10),所述液压机(10)一端连接有伸缩杆(1001),所述伸缩杆(1001)一端连接有移动块(1002),所述移动块(1002)内侧一端连接有第一转动盘(12),所述第一转动盘(12)内部一侧连接有多组支撑架(8),所述支撑架(8)一侧与第一固定板(7)内侧贴合连接。
2.如权利要求1所述可移动式越障带电作业机器人,其特征在于:所述第一转动盘(12)外部一侧连接有第二转动盘(1201),所述第二转动盘(1201)中间位置安装有螺栓(1202),所述螺栓(1202)一端与第一固定板(7)内侧相连接,所述机体(1)两端两侧连接有第一转动杆(2),所述液压机(10)一端安装有六角螺栓(11),所述六角螺栓(11)一端与第二固定板(9)外侧相连接。
3.如权利要求2所述可移动式越障带电作业机器人,其特征在于:所述第一转动杆(2)一端连接有轮胎(3),所述轮胎(3)两端连接有限位板(301),所述轮胎(3)侧面贴合连接有履带(20)。
4.如权利要求1所述可移动式越障带电作业机器人,其特征在于:所述机体(1)两侧中间位置连接有固定器(4),所述固定器(4)一侧安装有多组固定架(5),所述固定架(5)一端连接有第二转动杆(501),所述第二转动杆(501)一端连接有辅助轮(6),所述辅助轮(6)一端连接有第三转动杆(601),所述第三转动杆(601)一端与第一固定板(7)内侧相连接,所述辅助轮(6)一侧与履带(20)内侧贴合连接。
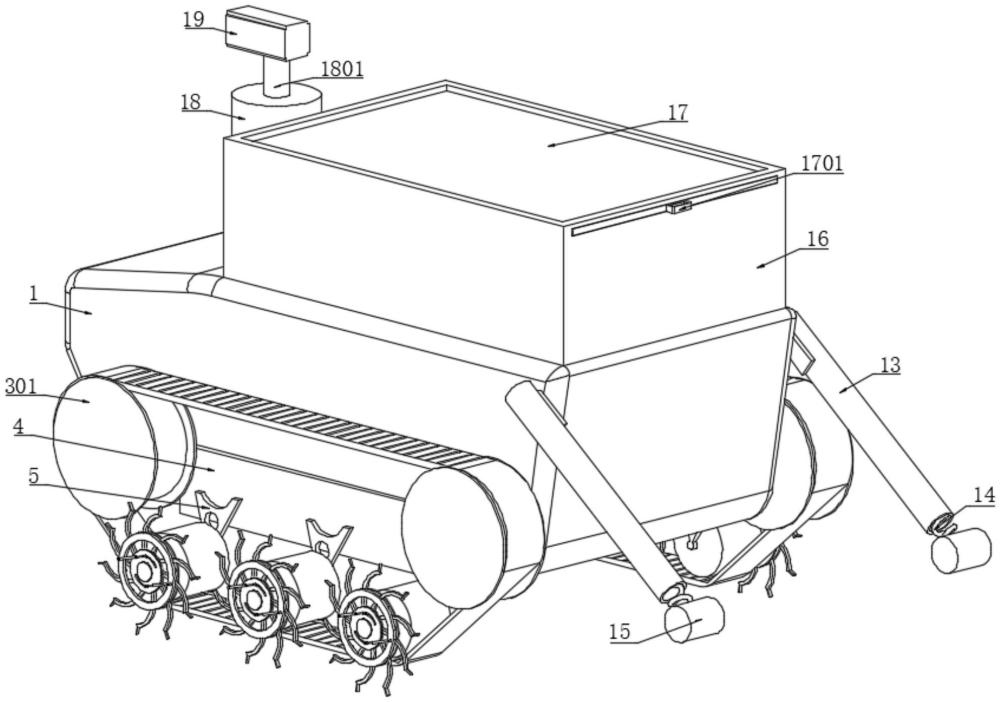
5.如权利要求1所述可移动式越障带电作业机器人,其特征在于:所述机体(1)一端两侧连接有固定杆(13),所述固定杆(13)内部安装有弹簧(14),所述弹簧(14)一端连接有限位器(15),所述机体(1)顶部一侧安装有收纳箱(16),所述收纳箱(16)顶部贴合连接有挡板(17),所述挡板(17)一端贯穿收纳箱(16)连接有把手(1701)。
6.如权利要求1所述可移动式越障带电作业机器人,其特征在于:所述机体(1)顶部一侧安装有限位柱(18),所述限位柱(18)一侧连接有多功能转动杆(1801),所述多功能转动杆(1801)底端连接有摄像头(19),所述限位柱(18)通过多功能转动杆(1801)连接有摄像头(19)。
技术总结
本技术提供可移动式越障带电作业机器人,包括机体,机体包括摄像头,机体安装有两侧安装有多组虹膜机构,虹膜机构包括第一固定板,第一固定板一侧连接有多组固定柱,本技术通过液压机带动伸缩杆伸缩,带动移动块进行移动,移动块带动第一转动盘进行移动,带动支撑架进行移动,支撑架加强辅助轮对地面的摩擦力,支撑架提高机体在泥地里的抓地力,不会让机体陷入到泥地里,同时轮胎与辅助轮的高度不同,提高了履带前端的高度,使机体可以更好的翻越障碍,机体两侧的固定杆、弹簧以及限位器可以防止机体发生翻滚,防止对机体造成破坏,本技术通过虹膜机构提高了机体在特殊环境的行动能力,从而提高了工作效率。
技术研发人员:彭玲玲,刘治平,许国香,袁康
受保护的技术使用者:青创智云(北京)科技有限公司
技术研发日:20230817
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!