一种工业机器人用模块化多角度调节装置的制作方法
本技术涉及工业机器人,具体为一种工业机器人用模块化多角度调节装置。
背景技术:
1、机器人是一种能够半自主或全自主工作的智能机器。机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。工业机器人被广泛应用于电子、物流、化工等各个工业领域之中。
2、在申请号为:cn202220580076.6,名称为:一种工业机器人用模块化多角度调节装置的专利中,通过调节组件、定位组件的共同配合来解决机械臂自身重力影响导致其变形断裂的问题;但是该方案中,只是通过对机械臂的底部进行了加固限制,其整体仍存在受力不均的情况;同时该方案中,机械臂的移动方式较为单一,难以满足使用需求。
技术实现思路
1、本实用新型的目的在于提供一种工业机器人用模块化多角度调节装置,以解决上述背景技术中提出的问题。
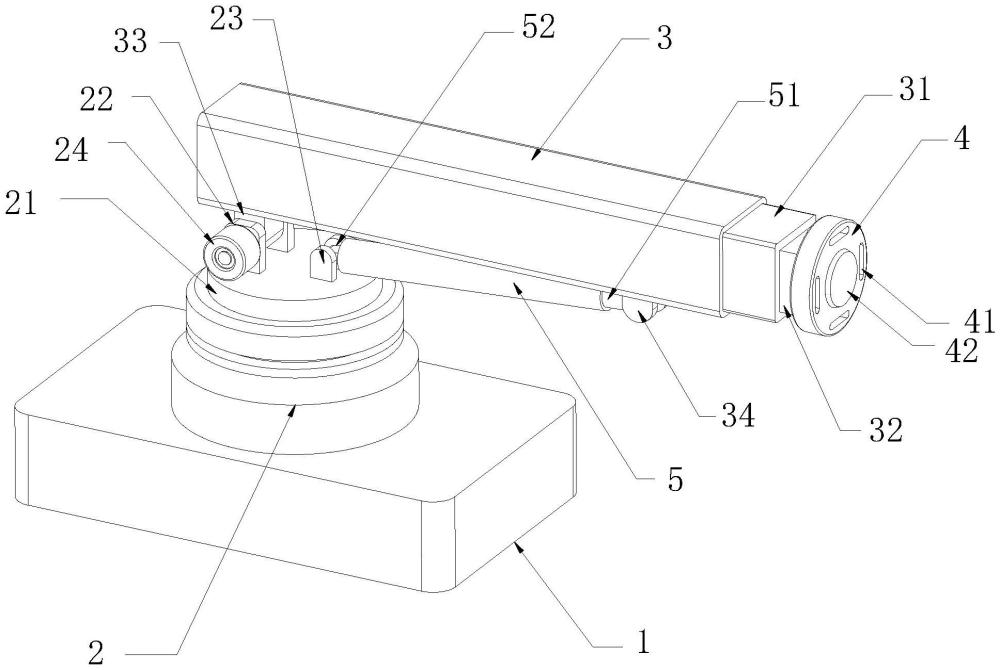
2、为实现上述目的,本实用新型提供如下技术方案:一种工业机器人用模块化多角度调节装置,包括安装座、换向台、驱动臂、安装板以及支撑套筒,所述安装座整体设置为方形结构,所述换向台设置在安装座的上部;所述换向台内部设置换向电机,所述换向电机的输出端安装有换向座;所述驱动臂一端开口,在驱动臂内设置有伸缩臂,所述安装板设置在伸缩臂的端部;所述驱动臂下侧设置有旋转块、第二支撑座,在换向座上部安装有旋转座、第一支撑座,所述旋转块通过转轴安装在旋转座中;所述支撑套筒内设置有支撑杆,所述支撑套筒端部转动安装在第一支撑座中,所述支撑杆端部转动安装在第二支撑座中。
3、优选的,所述旋转块、第二支撑座分别处于驱动臂下侧的两端,其中第二支撑座处于靠近安装板的一端;在旋转座的一侧设置有旋转电机,所述旋转电机的输出端与旋转块的转轴相连。
4、优选的,所述驱动臂、支撑套筒内部分布设置有液压杆,驱动臂中液压杆的输出端与伸缩臂相连,支撑套筒中液压杆的输出端与支撑杆相连。
5、优选的,所述支撑套筒端部设置有第一转块,所述支撑杆的端部设置有第二转块,所述第一转块、第二转块分别通过转轴安装在第一支撑座、第二支撑座中。
6、优选的,所述伸缩臂端部设置有调节台,在调节台内设置有调节电机,所述调节电机的输出端与安装板相连;所述安装座下侧设置有安装槽。
7、优选的,所述安装板设置为圆形结构,在安装板上设置有若干组呈环形阵列分布的安装孔,所述安装孔设置为腰型孔;所述安装板的中心处设置有缓冲垫,所述缓冲垫采用橡胶材料制成。
8、与现有技术相比,本实用新型的有益效果是:本实用新型所提供的调节装置,能够实现机械臂在多个维度上变换位置来满足使用需求;同时,还通过支撑套筒结构对机械臂的两端进行支撑,以使机械臂整体均匀受力,保障其使用寿命。
技术特征:
1.一种工业机器人用模块化多角度调节装置,其特征在于:包括安装座(1)、换向台(2)、驱动臂(3)、安装板(4)以及支撑套筒(5),所述安装座(1)整体设置为方形结构,所述换向台(2)设置在安装座(1)的上部;所述换向台(2)内部设置换向电机,所述换向电机的输出端安装有换向座(21);所述驱动臂(3)一端开口,在驱动臂(3)内设置有伸缩臂(31),所述安装板(4)设置在伸缩臂(31)的端部;所述驱动臂(3)下侧设置有旋转块(33)、第二支撑座(34),在换向座(21)上部安装有旋转座(22)、第一支撑座(23),所述旋转块(33)通过转轴安装在旋转座(22)中;所述支撑套筒(5)内设置有支撑杆(51),所述支撑套筒(5)端部转动安装在第一支撑座(23)中,所述支撑杆(51)端部转动安装在第二支撑座(34)中。
2.根据权利要求1所述的一种工业机器人用模块化多角度调节装置,其特征在于:所述旋转块(33)、第二支撑座(34)分别处于驱动臂(3)下侧的两端,其中第二支撑座(34)处于靠近安装板(4)的一端;在旋转座(22)的一侧设置有旋转电机(24),所述旋转电机(24)的输出端与旋转块(33)的转轴相连。
3.根据权利要求1所述的一种工业机器人用模块化多角度调节装置,其特征在于:所述驱动臂(3)、支撑套筒(5)内部分布设置有液压杆,驱动臂(3)中液压杆的输出端与伸缩臂(31)相连,支撑套筒(5)中液压杆的输出端与支撑杆(51)相连。
4.根据权利要求1所述的一种工业机器人用模块化多角度调节装置,其特征在于:所述支撑套筒(5)端部设置有第一转块(52),所述支撑杆(51)的端部设置有第二转块(53),所述第一转块(52)、第二转块(53)分别通过转轴安装在第一支撑座(23)、第二支撑座(34)中。
5.根据权利要求1所述的一种工业机器人用模块化多角度调节装置,其特征在于:所述伸缩臂(31)端部设置有调节台(32),在调节台(32)内设置有调节电机,所述调节电机的输出端与安装板(4)相连;所述安装座(1)下侧设置有安装槽(11)。
6.根据权利要求1所述的一种工业机器人用模块化多角度调节装置,其特征在于:所述安装板(4)设置为圆形结构,在安装板(4)上设置有若干组呈环形阵列分布的安装孔(41),所述安装孔(41)设置为腰型孔;所述安装板(4)的中心处设置有缓冲垫(42),所述缓冲垫(42)采用橡胶材料制成。
技术总结
本技术涉及工业机器人技术领域,具体公开了一种工业机器人用模块化多角度调节装置,包括安装座、换向台、驱动臂、安装板以及支撑套筒,所述安装座整体设置为方形结构,所述换向台设置在安装座的上部;所述换向台内部设置换向电机,所述换向电机的输出端安装有换向座;所述驱动臂一端开口,在驱动臂内设置有伸缩臂,所述安装板设置在伸缩臂的端部;所述驱动臂下侧设置有旋转块、第二支撑座,在换向座上部安装有旋转座、第一支撑座;所述旋转块通过转轴安装在旋转座中;所述支撑套筒内设置有支撑杆,所述支撑套筒端部转动安装在第一支撑座中,所述支撑杆端部转动安装在第二支撑座中。
技术研发人员:郝广利,黄培坚,湛湛
受保护的技术使用者:东莞创利达智能装备有限公司
技术研发日:20230816
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!