一种球形机器人机械结构减震系统的制作方法
本技术属于智能机器人领域,涉及一种球形机器人,特别涉及一种球形机器人机械结构减震系统。
背景技术:
1、球形机器人也称之为滚动机器人,球形机器人中部具有环形的滚动面,球形机器人的两侧中心之间设置主轴,主轴和滚动面之间可相对转动,确保滚动面滚动时,主轴保持相对稳定,主轴中心设置水平的副轴,副轴与主轴垂直且可相对转动,副轴的下方吊设有重摆,通过主轴驱动重摆的前后摆动,使驱动块重心向前或向后,实现球形机器人的前后滚动,通过副轴驱动重摆左右摆动,使驱动块重心向一侧倾斜,实现球形机器人的转弯。
2、球形机器人因其本身的外形特点具有更好的环境适应能力,能进入一些复杂、危险、恶劣的环境开展工作。球形机器人在复杂环境下工作时,会有受到较剧烈冲击或从一定高度上跌落的场景,容易对球形机器人内部的结构形成冲击,严重时会导致球形机器人损坏。
技术实现思路
1、本实用新型的目的在于解决球形机器人在复杂环境工作时,可能受到较剧烈冲击或从一定高度上跌落,导致内部结构损坏的问题,提供一种球形机器人机械结构减震系统,可以对球形机器人的内部部件、尤其是质量最大的重摆形成减震缓冲,减少球形机器人内部构件受冲击而损坏的概率。
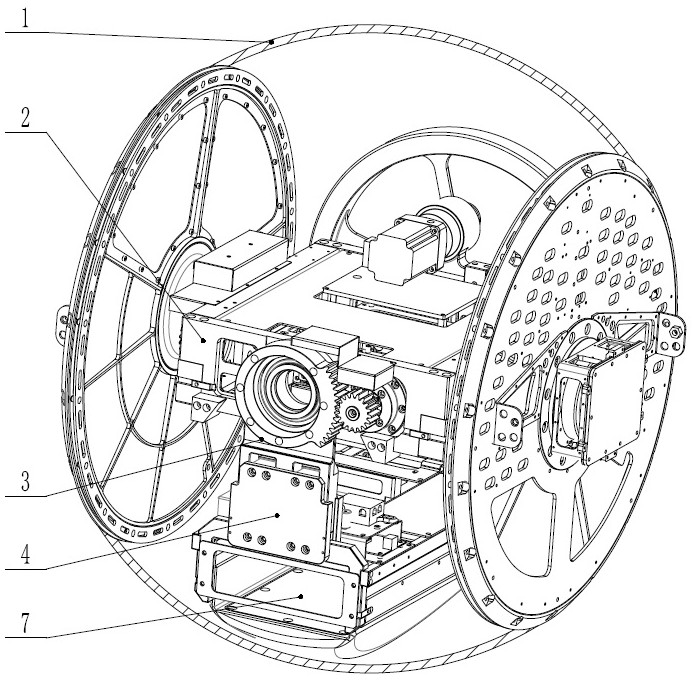
2、本实用新型解决其技术问题所采用的技术方案是:一种球形机器人机械结构减震系统,包括壳体,壳体中部为环形滚动面,壳体左右侧面中心之间设置有主轴,主轴中心设置有与主轴垂直的副轴,副轴下方吊设重摆,所述主轴中部为框型的主轴框架,主轴框架前后侧面对称设置有圆柱凸台,两圆柱凸台上分别挂设有副轴吊环,副轴吊环下部设有镂空的弹簧腔,所述重摆两侧分别通过减震板组件挂设在副轴吊环上,所述减震板组件上端从两侧扣设在弹簧腔内,所述减震板组件与弹簧腔之间设置减震弹簧。
3、本装置中,当球型机器人正常运动时,压设在减震板组件和副轴吊环之间的减震弹簧提供充足的支撑力,使重摆能悬空吊设在副轴上,与球壳内壁保持一定间距,且能跟随副轴的转动精确地改变重摆在球内的姿态,从而改变球形机器人的质心,提供运动所需的驱动力。在正常行驶,或受到细小颠簸时,重摆不应产生晃动,故由压设在减震板组件和副轴之间的减震弹簧弹力提供的支撑力须远大于重摆自重。当球形机器人从一定高度跌落,或者剧烈撞击坚硬物体时,因受外力影响壳体组件和主轴的速度在极短时间内降至零,重摆由于惯性,依旧保持原有状态运动,开始克服弹力相对主轴向下压缩减震弹簧运动,直至撞击到壳体内壁后,速度降为零。而后在减震弹簧作用下回弹。
4、作为优选,所述减震板组件包括相互扣合的第一减震板和第二减震板,第一减震板的上端向一侧设有凸块,所述减震弹簧设置在凸块底面和弹簧腔底面之间。弹簧腔设置为方形腔,方便减震弹簧的布置。
5、作为优选,所述重摆包括重摆主体,重摆主体的两侧设置有重摆吊耳,所述第一减震板和第二减震板从两侧抱夹重摆吊耳固定。
6、作为优选,所述重摆吊耳上端或副轴吊环下端设置有橡胶垫。
7、作为优选,所述减震板组件上方与弹簧腔顶面之间设有橡胶垫。当球形机器人过滤完首次跌落震动后恢复原始姿态时,减震弹簧开始向外释放压力,向上提起重摆,副轴相对向下运动撞击橡胶垫,此次冲击通过设置在重摆吊耳、副轴吊环之间的橡胶垫以及设置在弹簧腔间隙处的橡胶垫大幅吸收冲击力,过滤震动。
8、作为优选,所述副轴吊环和圆柱凸台之间设置有滚动轴承。
9、作为优选,所述主轴框架内侧设置有电器框架,所述电器框架前后左右四个侧面与主轴框架之间分别设置有钢丝减震器。电器框架吊设在钢丝减震器上,钢丝减震器具备多方向减震特性,能更有效的保护内部电器,承受不同方向的冲击。
10、作为优选,所述主轴框架与钢丝减震器一一对应设置有减震支架。
11、作为优选,所述主轴框架在主轴上居中设置,所述圆柱凸台位于主轴中心并与主轴相互垂直。圆柱凸台即副轴的上端在主轴上居中设置,保持球形机器人重心居中且稳定。
12、作为优选,单侧的减震板组件与弹簧腔之间并列设置两个减震弹簧。
13、本实用新型球形机器人在受到剧烈冲击或高处跌落时能通过减震弹簧对重摆进行缓冲减震,确保连接结构安全可靠,且通过钢丝减震器保证内部机构及电子元件功能正常,且减轻了机器人的整体重量,具有结构紧凑的优点。
技术特征:
1.一种球形机器人机械结构减震系统,包括壳体,壳体中部为环形滚动面,壳体左右侧面中心之间设置有主轴,主轴中心设置有与主轴垂直的副轴,副轴下方吊设重摆,其特征在于:所述主轴中部为框型的主轴框架,主轴框架前后侧面对称设置有圆柱凸台,两圆柱凸台上分别挂设有副轴吊环,副轴吊环下部设有镂空的弹簧腔,所述重摆两侧分别通过减震板组件挂设在副轴吊环上,所述减震板组件上端从两侧扣设在弹簧腔内,所述减震板组件与弹簧腔之间设置减震弹簧。
2.根据权利要求1所述的一种球形机器人机械结构减震系统,其特征在于:所述减震板组件包括相互扣合的第一减震板和第二减震板,第一减震板的上端向一侧设有凸块,所述减震弹簧设置在凸块底面和弹簧腔底面之间。
3.根据权利要求2所述的一种球形机器人机械结构减震系统,其特征在于:所述重摆包括重摆主体,重摆主体的两侧设置有重摆吊耳,所述第一减震板和第二减震板从两侧抱夹重摆吊耳固定。
4.根据权利要求3所述的一种球形机器人机械结构减震系统,其特征在于:所述重摆吊耳上端或副轴吊环下端设置有橡胶垫。
5.根据权利要求1或2或3所述的一种球形机器人机械结构减震系统,其特征在于:所述减震板组件上方与弹簧腔顶面之间设有橡胶垫。
6.根据权利要求1或2或3或4所述的一种球形机器人机械结构减震系统,其特征在于:所述副轴吊环和圆柱凸台之间设置有滚动轴承。
7.根据权利要求1或2或3所述的一种球形机器人机械结构减震系统,其特征在于:所述主轴框架内侧设置有电器框架,所述电器框架前后左右四个侧面与主轴框架之间分别设置有钢丝减震器。
8.根据权利要求7所述的一种球形机器人机械结构减震系统,其特征在于:所述主轴框架与钢丝减震器一一对应设置有减震支架。
9.根据权利要求1或2或3所述的一种球形机器人机械结构减震系统,其特征在于:所述主轴框架在主轴上居中设置,所述圆柱凸台位于主轴中心并与主轴相互垂直。
10.根据权利要求1或2或3所述的一种球形机器人机械结构减震系统,其特征在于:单侧的减震板组件与弹簧腔之间并列设置两个减震弹簧。
技术总结
本技术涉及一种球形机器人机械结构减震系统,解决球形机器人在复杂环境工作时,可能受到较剧烈冲击或从一定高度上跌落的问题。本装置壳体左右侧面中心之间设置有主轴,主轴中心设置有与主轴垂直的副轴,副轴下方吊设重摆,所述主轴中部为框型的主轴框架,主轴框架前后侧面对称设置有圆柱凸台,两圆柱凸台上分别挂设有副轴吊环,副轴吊环下部设有镂空的弹簧腔,重摆两侧分别通过减震板组件挂设在副轴吊环上,减震板组件上端从两侧扣设在弹簧腔内,减震板组件与弹簧腔之间设置减震弹簧。本技术球形机器人在受到冲击或高处跌落时能通过减震弹簧对重摆进行缓冲减震,确保连接结构安全可靠,且通过钢丝减震器保证内部机构及电子元件功能正常。
技术研发人员:宁建忠,陈振峰,叶泉,王酉,郝杰
受保护的技术使用者:逻腾(杭州)科技有限公司
技术研发日:20230817
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!