一种机器人大臂的制作方法
本技术属于机器人领域,更具体而言涉及一种机器人大臂。
背景技术:
1、机器人是一种可以半自动或全自动进行工作的智能机器,从而可以代替人们从事各种繁重的机械化劳动,因此所应用的领域范围十分广泛,其运动原理是在大臂的带动下,机器人小臂可以进行俯仰运动,但现有技术中在大臂滑动组件的驱动下往往不能行之有效的带动小臂支撑架实现转动,进而不能有效的使机器人小臂进行俯仰运动,而且目前大都采用在机器人大臂内设置丝杠,以丝杠的转动来驱动滑动装置带动机器人小臂进行俯仰运动,然而这样设置对丝杠上滑动装置没有起到导向的作用,进而会导致机器人大臂丝杠产生较大的径向变形。
技术实现思路
1、本实用新型的主要目的在于提供一种机器人大臂,可以有效的带动小臂支撑架实现转动,从而实现机器人小臂的俯仰运动作业,同时可以对丝杠上的大臂滑动组件在丝杠轴线方向上的运动起到导向作用,进而保证大臂丝杠在工作中不发生较大的径向变形。
2、为达到上述目的,本实用新型的技术方案为:
3、一种机器人大臂,包括有大臂主体,所述大臂主体一端设有大臂驱动装置,所述大臂主体的另一端设有小臂承载架,所述大臂驱动装置的输出端设有大臂丝杠,所述大臂丝杠上还设有大臂滑动组件,所述小臂承载架一端设有小臂拉杆,所述小臂拉杆的另一端与所述大臂滑动组件连接。
4、本实用新型的一个特定的实施例中,所述大臂滑动组件包括大臂滑块,所述大臂主体内设有至少一副大臂滑轨,所述大臂滑块与所述大臂滑轨配合连接。
5、本实用新型的一个特定的实施例中,所述大臂滑动组件还包括在大臂丝杠上设置的丝杠螺母连接件与所述丝杠螺母连接件配合连接的丝杠螺母。
6、本实用新型的一个特定的实施例中,所述大臂主体包括在所述大臂丝杠上方设置的大臂上加强板和在所述大臂丝杠下方设置的大臂下加强板,且所述大臂上加强板与所述大臂下加强板相互平行。
7、本实用新型的一个特定的实施例中,所述大臂上加强板靠近所述大臂丝杠的一侧设有两幅所述大臂滑轨,所述大臂下加强板靠近所述大臂丝杠的一侧设有两副所述大臂滑轨,所述丝杠螺母连接件的第一侧上设有两幅所述大臂滑块,所述丝杠螺母连接件的第二侧上设有两幅所述大臂滑块,所述大臂上加强板上的两幅所述大臂滑轨与所述第一侧上的两幅所述大臂滑块配合连接,所述大臂下加强板上的两幅所述大臂滑轨与所述第二侧上的两幅所述大臂滑块配合连接。
8、本实用新型的一个特定的实施例中,所述大臂驱动装置包含大臂电机、在大臂电机上设置的大臂减速器和在大臂减速器上设置的联轴器。
9、本实用新型的一个特定的实施例中,所述大臂驱动装置两侧设有大臂电机安装架。
10、本实用新型的一个特定的实施例中,两个所述大臂电机安装架相互平行,且两个所述大臂电机安装架的中心位置各设有一个大臂支撑轴。
11、本实用新型的一个特定的实施例中,所述小臂承载架靠近所述大臂下加强板的一端设有小臂连接轴,所述小臂承载架靠近所述大臂上加强板的一端设有辅大臂连接轴。
12、本实用新型上述技术方案中的一个技术方案至少具有如下优点或有益效果之一:
13、本实用新型通过在大臂主体的一端设置小臂承载架,在小臂承载架一端设置小臂拉杆,将小臂拉杆的另一端与大臂主体内大臂丝杠上的大臂滑动组件连接,可以保证在大臂滑动组件的驱动下小臂拉杆能够带动小臂支撑架实现转动,进而可以保证小臂进行俯仰运动,通过在大臂主体内设置大臂滑轨,在大臂滑动组件上设置大臂滑块,将大臂滑块与大臂滑轨配合连接,从而保证大臂滑动组件在大臂丝杠轴线方向上的运动导向良好,进而保证了大臂丝杠在工作时不会产生过大的径向变形。
技术特征:
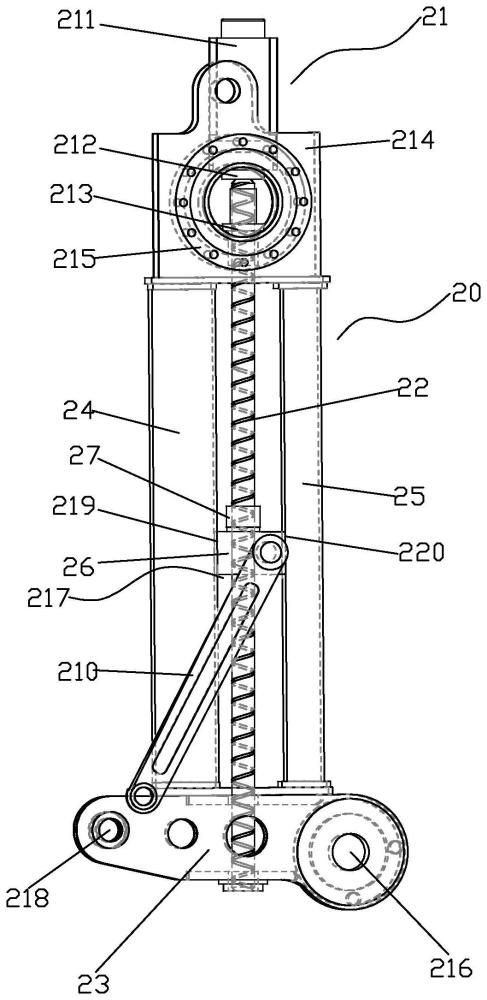
1.一种机器人大臂,其特征在于,包括有大臂主体(20),所述大臂主体(20)一端设有大臂驱动装置(21),所述大臂主体(20)的另一端设有小臂承载架(23),所述大臂驱动装置(21)的输出端设有大臂丝杠(22),所述大臂丝杠(22)上还设有大臂滑动组件(217),所述小臂承载架(23)一端设有小臂拉杆(210),所述小臂拉杆(210)的另一端与所述大臂滑动组件(217)连接。
2.根据权利要求1所述的机器人大臂,其特征在于:所述大臂滑动组件(217)包括大臂滑块(29),所述大臂主体(20)内设有至少一副大臂滑轨(28),所述大臂滑块(29)与所述大臂滑轨(28)配合连接。
3.根据权利要求2所述的机器人大臂,其特征在于:所述大臂滑动组件(217)还包括在大臂丝杠(22)上设置的丝杠螺母连接件(26)与所述丝杠螺母连接件(26)配合连接的丝杠螺母(27)。
4.根据权利要求3所述的机器人大臂,其特征在于:所述大臂主体(20)包括在所述大臂丝杠(22)上方设置的大臂上加强板(24)和在所述大臂丝杠(22)下方设置的大臂下加强板(25),且所述大臂上加强板(24)与所述大臂下加强板(25)相互平行。
5.根据权利要求4所述的机器人大臂,其特征在于:所述大臂上加强板(24)靠近所述大臂丝杠(22)的一侧设有两幅所述大臂滑轨(28),所述大臂下加强板(25)靠近所述大臂丝杠(22)的一侧设有两副所述大臂滑轨(28),所述丝杠螺母连接件(26)的第一侧(219)上设有两幅所述大臂滑块(29),所述丝杠螺母连接件(26)的第二侧(220)上设有两幅所述大臂滑块(29),所述大臂上加强板(24)上的两幅所述大臂滑轨(28)与所述第一侧(219)上的两幅所述大臂滑块(29)配合连接,所述大臂下加强板(25)上的两幅所述大臂滑轨(28)与所述第二侧(220)上的两幅所述大臂滑块(29)配合连接。
6.根据权利要求1所述的机器人大臂,其特征在于:所述大臂驱动装置(21)包括大臂电机(211)、在大臂电机(211)上设置的大臂减速器(212)和在大臂减速器(212)上设置的联轴器(213)。
7.根据权利要求6所述的机器人大臂,其特征在于:所述大臂驱动装置(21)两侧设有大臂电机安装架(214)。
8.根据权利要求7所述的机器人大臂,其特征在于:两个所述大臂电机安装架(214)相互平行,且两个所述大臂电机安装架(214)的中心位置各设有一个大臂支撑轴(215)。
9.根据权利要求4所述的机器人大臂,其特征在于:所述小臂承载架(23)靠近所述大臂下加强板(25)的一端设有小臂连接轴(216),所述小臂承载架(23)靠近所述大臂上加强板(24)的一端设有辅大臂连接轴(218)。
技术总结
本技术公开了一种机器人大臂,包括有大臂主体,大臂主体的一端设有大臂驱动装置,大臂主体的另一端设有小臂承载架,大臂驱动装置的输出端设有大臂丝杠,大臂丝杠远离大臂驱动装置的一端与小臂承载架连接,大臂丝杠上还设有大臂滑动组件,小臂承载架一端设有小臂拉杆,小臂拉杆的另一端与大臂滑动组件连接,另外在大臂主体内设置有滑轨,而且在大臂滑动组件上设有大臂滑块,本技术提供了一种机器人大臂,在大臂滑动组件的驱动下可以有效带动小臂进行俯仰运动,而且可以对大臂滑动组件在丝杠轴线方向上的运动起到导向作用,进而保证大臂丝杠在工作中不会发生较大的径向变形,本技术属于机器人领域。
技术研发人员:官志伟,杨君勇,李恒通,吴丹,李涛,黄祖文,赖启文,陈永国,简宏
受保护的技术使用者:广州铁路科技开发有限公司
技术研发日:20230828
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!