一种承托式取放治具的机械手的制作方法
本技术涉及治具组装,具体涉及一种承托式取放治具的机械手。
背景技术:
1、现有技术中软性基板制成的薄型板件,是3c电子产业中相当重要的零件;由于薄型板件缺乏刚性,极易弯曲变形或折损;因此,在薄型板件的加工制程中,必需将其置入双板治具中,利用双板治具的刚性结构,来保护该薄型板件在进行运送与制程加工中免于变形与折损。
2、一般的情况下是使用夹持机械手对治具进行夹持进行转移,由于普通的机械手的尺寸较大,导致治具的摆放需要留足够的位置供机械手进行伸缩,影响单位体积内治具摆放的利用率,对成本等方面造成影响。
技术实现思路
1、为了克服现有技术中存在的缺点和不足,本实用新型的目的在于提供一种承托式取放治具的机械手,可从治具的下方将治具进行承托取放,有效提升单位体积内治具摆放的利用率。
2、本实用新型是通过以下技术方案实现的:
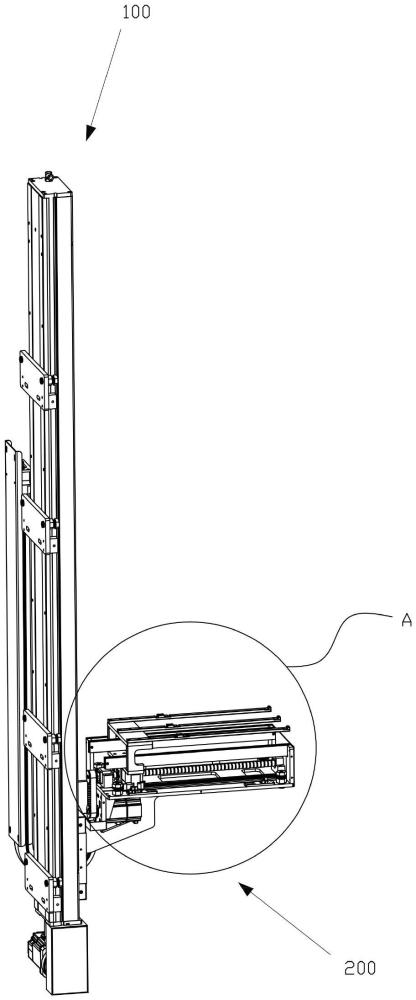
3、一种承托式取放治具的机械手,包括治具升降机构、治具伸缩机构以及治具承托件,所述治具伸缩机构装设于治具升降机构的输出端,所述治具承托件装设于治具伸缩机构的输出端;所述治具承托件包括若干平行设置的承托条,所述承托条远离治具升降机构的一端设置有阻挡凸部,所述承托条的非两端位置设置有定位凸部。
4、其中,所述治具伸缩机构包括安装架体、伸缩电机、传动组件、滑轨以及滑块,所述电机以及滑轨分别装设于安装架体,所述驱动电机通过传动组件与滑块驱动连接,所述滑块与滑轨滑动连接,所述治具承托件与滑块连接。
5、其中,所述传动组件包括第一同步轮、第二同步轮、同步带、螺杆以及螺母,所述第一同步轮装设于驱动电机的输出轴,所述第一同步轮通过同步带与第二同步轮驱动连接,所述第二同步轮连接于螺杆的一端,所述螺杆与螺母螺接,所述螺母与滑块连接。
6、其中,所述滑轨一侧的前后两端分别设置有传感器,所述滑块的一侧连接有用于触发传感器的挡片。
7、其中,多个承托条之间等距设置。
8、其中,所述定位凸部与承托条阻尼式地滑动连接。
9、本实用新型的有益效果:
10、本实用新型的一种承托式取放治具的机械手,通过设置有治具升降机构、治具伸缩机构以及治具承托件,治具承托件至少由若干平行设置的承托条组成,使用时,治具升降机构驱动治具伸缩机构升降至对应的位置,随后治具伸缩机构驱动治具承托件伸进外界的治具存储仓的隔层内,治具升降机构再驱动治具伸缩机构上升一定的距离后,阻挡凸部以及定位凸部对治具定位的同时将双层治具托起;此时治具伸缩机构驱动治具承托件缩回,即完成对双板治具的取出;需要放回治具时则进行相反的操作。与传统的夹持结构相比,本实用新型可从治具的下方将治具进行承托取放,有效提升单位体积内治具摆放的利用率。
技术特征:
1.一种承托式取放治具的机械手,其特征在于:包括治具升降机构、治具伸缩机构以及治具承托件,所述治具伸缩机构装设于治具升降机构的输出端,所述治具承托件装设于治具伸缩机构的输出端;
2.根据权利要求1所述的一种承托式取放治具的机械手,其特征在于:所述治具伸缩机构包括安装架体、伸缩电机、传动组件、滑轨以及滑块,所述伸缩电机以及滑轨分别装设于安装架体,所述伸缩电机通过传动组件与滑块驱动连接,所述滑块与滑轨滑动连接,所述治具承托件与滑块连接。
3.根据权利要求2所述的一种承托式取放治具的机械手,其特征在于:所述传动组件包括第一同步轮、第二同步轮、同步带、螺杆以及螺母,所述第一同步轮装设于伸缩电机的输出轴,所述第一同步轮通过同步带与第二同步轮驱动连接,所述第二同步轮连接于螺杆的一端,所述螺杆与螺母螺接,所述螺母与滑块连接。
4.根据权利要求2所述的一种承托式取放治具的机械手,其特征在于:所述滑轨一侧的前后两端分别设置有传感器,所述滑块的一侧连接有用于触发传感器的挡片。
5.根据权利要求1所述的一种承托式取放治具的机械手,其特征在于:多个承托条之间等距设置。
6.根据权利要求1所述的一种承托式取放治具的机械手,其特征在于:所述定位凸部与承托条阻尼式地滑动连接。
技术总结
本技术涉及治具组装技术领域,具体涉及一种承托式取放治具的机械手,该机械手包括治具升降机构、治具伸缩机构以及治具承托件,所述治具伸缩机构装设于治具升降机构的输出端,所述治具承托件装设于治具伸缩机构的输出端;所述治具承托件包括若干平行设置的承托条,所述承托条远离治具升降机构的一端设置有阻挡凸部,所述承托条的非两端位置设置有定位凸部。本技术的目的在于提供一种承托式取放治具的机械手,可从治具的下方将治具进行承托取放,有效提升单位体积内治具摆放的利用率。
技术研发人员:王建智,李文舜
受保护的技术使用者:迅得机械(东莞)有限公司
技术研发日:20230829
技术公布日:2024/5/19
- 还没有人留言评论。精彩留言会获得点赞!