一种挂轨式巡检机器人
本技术涉及巡检机器人的,尤其是涉及一种挂轨式巡检机器人。
背景技术:
1、在养鸡时需要构建鸡舍,较大规模的鸡舍可能会出现无人值守的情况,为了保证饲养的鸡能安全的长大,需要及时掌握鸡舍的情况,可通过轨道安装巡检机器人,可顺着轨道对现场进行巡视,及时发现鸡舍的情况,在其它的需要巡检的场所,也常应用到巡检机器人。
2、巡检机器人可挂在轨道上通过电机驱动,巡检机器人在巡检过程中,需要进行转弯,在转弯时可通过导向轮转弯,但是轨道发生弯曲,部分搭在轨道上的滚轮会出现摩擦,使得拐弯不够稳定。因此,本领域技术人员提供了一种挂轨式巡检机器人,以解决提出的问题。
技术实现思路
1、为了解决上述拐弯不够稳定的问题,本实用新型提供一种挂轨式巡检机器人。
2、本实用新型提供的一种挂轨式巡检机器人采用如下的技术方案:
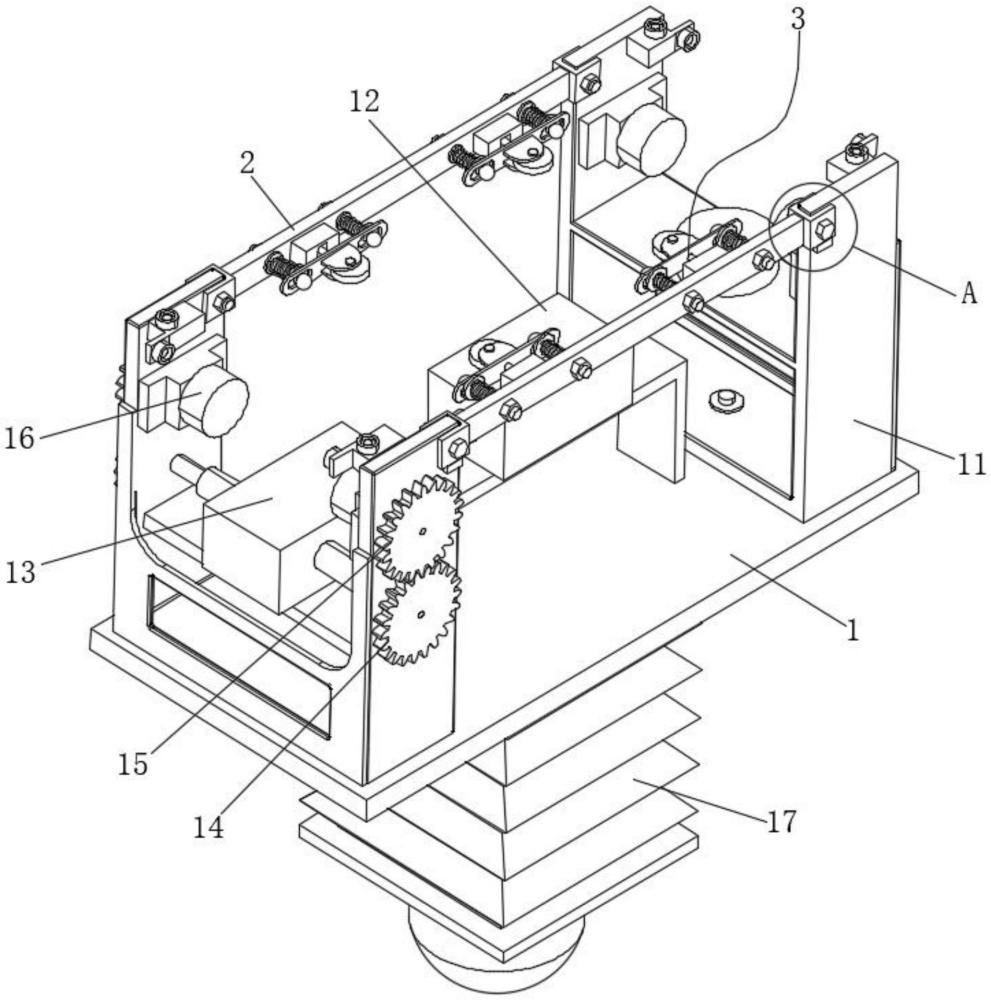
3、一种挂轨式巡检机器人,包括主架,主架的顶部对称地固定安装有两个侧架,主架上固定安装有电机,电机的输出轴安装有差速器,差速器分别通过两个轴安装有齿轮一,齿轮一的上方啮接有齿轮二,两个齿轮一和两个齿轮二均通过转轴转动安装在其中一个侧架上,两个齿轮二上的转轴另一端固定安装有滚轮,另一个侧架上也对应地转动安装有两个滚轮,主架的底部设置有检测结构,两个所述侧架之间通过螺栓固定安装有连接板,连接板上设置有两个导向结构,导向结构包括两个横柱,两个横柱均插接连接板上,横柱上固定套设有限位板,横柱上还套设有弹簧一和垫片,两个横柱上共同套设有安装板,横柱的一端通过螺纹安装有螺母,横柱的另一端固定安装有圆球,安装板一侧还转动安装有导向轮,可对拐弯进行导向,使能顺利地稳定地进行拐弯。
4、优选的,所述安装板上对称地开设有两个槽口,两个横柱分别贯穿两个槽口,槽口可使安装板能移动,方便进行拐弯。
5、优选的,所述连接板上还固定安装有两个调节块,且调节块位于两个横柱之间,安装板的另一侧固定安装有固定杆,固定杆插接在调节块内,可对安装板进行复位。
6、优选的,所述调节块内开设有两个内槽,调节块的一侧开设有中间口,内槽内设置有弹簧二,内槽内插接有插块,插块的一端固定安装有推块,推块设置在中间口内,在拐弯结束后,对应的弹簧二可通过推块使安装板复位。
7、优选的,所述推块为对称设置,且两个推块相对一侧设置为弧面,固定杆插接在两个推块之间,可方便固定杆与弧面接触插入到两个推块之间。
8、综上所述,本实用新型包括以下有益技术效果:
9、可实现转弯的功能,四个导向结构可对轨道进行导向,可减少滚轮与轨道结构接触出现较大摩擦,当需要拐弯时,横柱穿过槽口,安装板可横向移动,弹簧一可压缩,安装板可顺着横柱的方向移动,可根据轨道的改变进行相适应的位置变化,当拐弯结束后固定杆在两个弹簧二的作用下,可回到初始位置,拐弯的过程比较稳定。
技术特征:
1.一种挂轨式巡检机器人,包括主架(1),主架(1)的顶部对称地固定安装有两个侧架(11),主架(1)上固定安装有电机(12),电机(12)的输出轴安装有差速器(13),差速器(13)分别通过两个轴安装有齿轮一(14),齿轮一(14)的上方啮接有齿轮二(15),两个齿轮一(14)和两个齿轮二(15)均通过转轴转动安装在其中一个侧架(11)上,两个齿轮二(15)上的转轴另一端固定安装有滚轮(16),另一个侧架(11)上也对应地转动安装有两个滚轮(16),主架(1)的底部设置有检测结构(17),其特征在于:两个所述侧架(11)之间通过螺栓固定安装有连接板(2),连接板(2)上设置有两个导向结构(3),导向结构(3)包括两个横柱(31),两个横柱(31)均插接连接板(2)上,横柱(31)上固定套设有限位板(32),横柱(31)上还套设有弹簧一(33)和垫片(34),两个横柱(31)上共同套设有安装板(35),横柱(31)的一端通过螺纹安装有螺母,横柱(31)的另一端固定安装有圆球,安装板(35)一侧还转动安装有导向轮(314)。
2.根据权利要求1所述的一种挂轨式巡检机器人,其特征在于:所述安装板(35)上对称地开设有两个槽口(36),两个横柱(31)分别贯穿两个槽口(36)。
3.根据权利要求1所述的一种挂轨式巡检机器人,其特征在于:所述连接板(2)上还固定安装有两个调节块(38),且调节块(38)位于两个横柱(31)之间,安装板(35)的另一侧固定安装有固定杆(37),固定杆(37)插接在调节块(38)内。
4.根据权利要求3所述的一种挂轨式巡检机器人,其特征在于:所述调节块(38)内开设有两个内槽(39),调节块(38)的一侧开设有中间口(311),内槽(39)内设置有弹簧二(310),内槽(39)内插接有插块(312),插块(312)的一端固定安装有推块(313),推块(313)设置在中间口(311)内。
5.根据权利要求4所述的一种挂轨式巡检机器人,其特征在于:所述推块(313)为对称设置,且两个推块(313)相对一侧设置为弧面,固定杆(37)插接在两个推块(313)之间。
技术总结
本技术涉及一种挂轨式巡检机器人,包括主架,主架的顶部对称地固定安装有两个侧架,主架上固定安装有电机,电机的输出轴安装有差速器,差速器分别通过两个轴安装有齿轮一,齿轮一的上方啮接有齿轮二,两个齿轮一和两个齿轮二均通过转轴转动安装在其中一个侧架上;本方案通过可实现转弯的功能,四个导向结构可对轨道进行导向,可减少滚轮与轨道结构接触出现较大摩擦,当需要拐弯时,横柱穿过槽口,安装板可横向移动,弹簧一可压缩,安装板可顺着横柱的方向移动,可根据轨道的改变进行相适应的位置变化,当拐弯结束后固定杆在两个弹簧二的作用下,可回到初始位置,拐弯的过程比较稳定。
技术研发人员:班浩,徐文龙,石传淼,李盛章,徐天哲,仝志民
受保护的技术使用者:青岛农业大学
技术研发日:20230830
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!