一种具有反馈系统的六自由度水下功能作业机械手
本技术涉及机械手,尤其涉及一种具有反馈系统的六自由度水下功能作业机械手。
背景技术:
1、水下作业机械手,是通过模仿人手和手臂的动作功能,用于代替人工、按照固定程序进行抓取、搬运及操作工具的装置,可通过人工遥控或自动控制来代替人工完成各种水下作业任务,在水下生物样本采集、海洋资源开发、深水油气田咖啡等领域被广泛应用。
2、现有技术的水下作业机械手,由于机械手臂自由度不足,造成活动范围和作业空间小,转动不够灵活,机械手臂转动角度的反馈效果差,使得操作者无法准确感知机械臂角度位移的变化,造成操控性能不佳,使用可靠性差,无法满足水下复杂的工况,另外,现有技术的水下作业机械手大多只能抓取单一物体,适用范围较窄,对抓取不同形状和特性物体的适应程度具有较大的局限性。
3、因此,有必要提出一种具有反馈系统的六自由度水下功能作业机械手的改进,以克服现有技术的缺陷。
技术实现思路
1、本实用新型的目的是解决现有技术中的问题,提供一种具有反馈系统的六自由度水下功能作业机械手。
2、本实用新型的技术方案是:
3、一种具有反馈系统的六自由度水下功能作业机械手,包括;
4、旋转底座单元,底座单元包括底座本体,底座本体上设置有垂坐式角度反馈装置和底座回转装置,底座回转装置和垂坐式角度反馈装置传动连接;
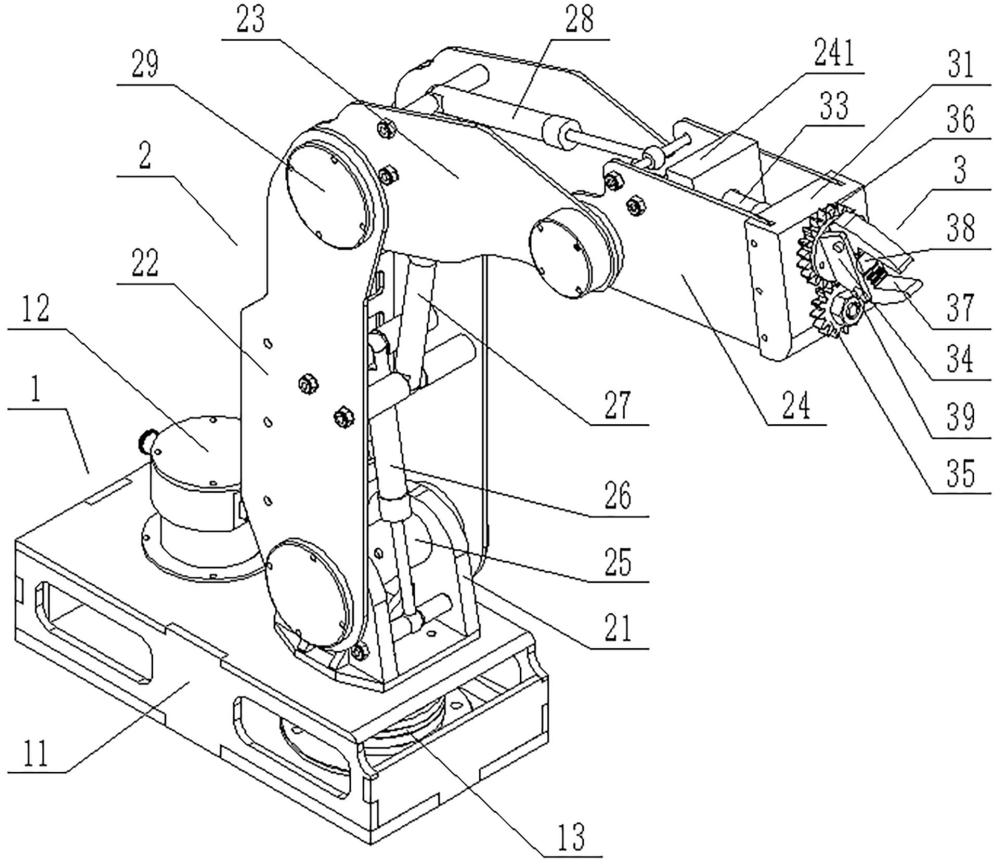
5、摆臂单元,摆臂单元包括肩部关节框架、大臂关节、小臂关节和延展臂关节,肩部关节框架设置在底座回转装置上,肩部关节框架、大臂关节、小臂关节、延展臂关节依次通过悬挂式角度反馈装置枢轴连接;
6、爪部单元,爪部单元设置在延展臂关节上,用于实现物品的抓取,爪部单元上设置有力学反馈传感器。
7、优选的,底座回转装置包括旋转轴、回转枢轴、回转连接筒、顶部压紧板和第一液压缸,旋转轴设置在底座本体上,回转枢轴可转动设置在旋转轴上,回转连接筒套设在回转枢轴上,且通过顶部压紧板与肩部关节框架连接,第一液压缸的固定端铰接在底座本体上,第一液压缸的自由端铰接在回转连接筒上;
8、第一液压缸推动回转连接筒绕旋转轴转动,通过相互连接的回转连接筒、回转枢轴和顶部压紧板带动肩部关节框架转动,形成一个肩部角度旋转的自由度。
9、优选的,垂坐式角度反馈装置包括垂坐外壳和第一电位器,垂坐外壳设置在底座本体上,第一电位器设置在垂坐外壳的内部,第一电位器的转轴穿出垂坐外壳连接有绕线装置,绕线装置与回转连接筒传动连接,垂坐外壳的顶部设置有第一封板;
10、第一液压缸驱动回转连接筒转动,通过传动连接带动绕线装置同步旋转,从而带动第一电位器的转轴转动触发第一电位器发出信号,信号反馈精准。
11、优选的,悬挂式角度反馈装置包括悬挂外壳、第二电位器和连接轴,第二电位器设置在悬挂外壳的内部,连接轴一端与第二电位器的转轴连接,连接轴另一端延伸至悬挂外壳的外部与侧盖板连接,悬挂外壳远离连接轴的端部设置有第二封板;
12、悬挂外壳采用过盈配合安装,旋转时悬挂外壳带动第二电位器同步转动,由于连接轴被侧盖板限制转动,使得第二电位器的转轴与连接轴之间产生相对的转动,触发第二电位器发出信号并反馈给上位控制系统。
13、优选的,爪部单元包括承载块、旋转舵机、第二液压缸和固定座,承载块设置在延展臂关节的端部,旋转舵机设置在承载块上,旋转舵机的输出轴穿透承载块连接有主动齿轮,承载块上设置有可转动的从动齿轮,从动齿轮和主动齿轮啮合,固定座连接在从动齿轮上,固定座上对称设置有两个夹爪,夹爪通过力学反馈传感器与固定座铰接,夹爪的铰接端设置有不完全齿轮,第二液压缸的固定端铰接在延展臂关节上,第二液压缸的自由端连接有齿条,齿条与夹爪的不完全齿轮啮合;
14、旋转舵机驱动主动齿轮转动,通过主动齿轮和从动齿轮的啮合,带动固定座以及固定座上的夹爪旋转,形成夹爪旋转的自由度,第二液压缸带动齿条移动,通过齿条与夹爪不完全齿轮的啮合,带动两个夹爪开闭,形成夹爪抓取的自由度,夹爪通过力学反馈传感器铰接,采集夹爪的抓取力,完成夹爪的精准的力学设计,做到既可以夹软体生物又可以采集岩石矿产,满足机械手水下功能作业的兼容性与作业的多维度性。
15、优选的,肩部关节框架和大臂关节之间设置有第三液压缸,大臂关节和小臂关节之间设置有第四液压缸,小臂关节和延展臂关节之间设置有第五液压缸;
16、第三液压缸带动大臂关节绕肩部关节框架旋转,第四液压缸带动小臂关节绕大臂关节旋转,第五液压缸带动延展臂关节绕小臂关节旋转,通过三个液压缸的伸缩控制摆臂单元形成三个角度旋转的自由度。
17、优选的,悬挂外壳的外侧壁上和或设置有法兰盘;
18、悬挂外壳上设置有法兰盘时,通过法兰盘与肩部关节框架连接。
19、优选的,延展臂关节上设置有托块,旋转舵机和第二液压缸均穿透设置在托块上;
20、托块对旋转舵机和第二液压缸进行支撑,并对第二液压缸进行限位,保持旋转舵机和第二液压缸安装的稳定性。
21、优选的,垂坐外壳在位于第一电位器转轴伸出的端部设置有组合密封垫,第一封板上套设有密封圈;
22、增强垂坐外壳的密封性,避免在进行水下作业时,水进入垂坐外壳内造成第一电位器的损坏。
23、优选的,悬挂外壳在连接轴伸出的端部设置有密封环,密封环套装在连接轴上,第二封板上套设有密封圈;
24、增强悬挂外壳的密封性,避免在进行水下作业时,水泄漏进入悬挂外壳的内部,造成第二电位器的损坏。
25、与现有技术相比,本实用新型的有益效果是:
26、1.灵活性高,六自由度的设计使得整个机械手系统具有较高的灵活性,通过各种运动机构的组合设计,使得整个运动系统灵活性进一步提高,满足水下作业空间运动的需求;
27、2.运动控制定位准确,电位器的设计使得各个关节的运动及时的反馈给上位控制系统,控制系统根据接收的信号进一步控制相应关节的运动,做到实时准确的定位控制;
28、3.爪部功能作业多元化,夹爪上设置力学反馈传感器,可以清晰地测量爪部给所抓取的物体所施加的力,通过调节爪部抓取物体的力的大小可以满足多种物品的抓取,实现爪部功能作业的多元化。
技术特征:
1.一种具有反馈系统的六自由度水下功能作业机械手,其特征在于:包括:
2.根据权利要求1所述的具有反馈系统的六自由度水下功能作业机械手,其特征在于:所述底座回转装置(13)包括旋转轴(131)、回转枢轴(132)、回转连接筒(133)、顶部压紧板(134)和第一液压缸(135),所述旋转轴(131)设置在底座本体(11)上,所述回转枢轴(132)可转动设置在旋转轴(131)上,所述回转连接筒(133)套设在回转枢轴(132)上,且通过顶部压紧板(134)与肩部关节框架(21)连接,所述第一液压缸(135)的固定端铰接在底座本体(11)上,第一液压缸(135)的自由端铰接在回转连接筒(133)上。
3.根据权利要求2所述的具有反馈系统的六自由度水下功能作业机械手,其特征在于:所述垂坐式角度反馈装置(12)包括垂坐外壳(121)和第一电位器(122),所述垂坐外壳(121)设置在底座本体(11)上,所述第一电位器(122)设置在垂坐外壳(121)的内部,第一电位器(122)的转轴穿出垂坐外壳(121)连接有绕线装置(124),所述绕线装置(124)与回转连接筒(133)传动连接,垂坐外壳(121)的顶部设置有第一封板(123)。
4.根据权利要求1所述的具有反馈系统的六自由度水下功能作业机械手,其特征在于:所述悬挂式角度反馈装置(25)包括悬挂外壳(251)、第二电位器(252)和连接轴(253),所述第二电位器(252)设置在所述悬挂外壳(251)的内部,所述连接轴(253)一端与第二电位器(252)的转轴连接,连接轴(253)另一端延伸至悬挂外壳(251)的外部与侧盖板(29)传动连接,悬挂外壳(251)远离连接轴(253)的端部设置有第二封板(254)。
5.根据权利要求1所述的具有反馈系统的六自由度水下功能作业机械手,其特征在于:所述爪部单元(3)包括承载块(31)、旋转舵机(32)、第二液压缸(33)和固定座(34),所述承载块(31)设置在延展臂关节(24)的端部,所述旋转舵机(32)设置在所述承载块(31)上,旋转舵机(32)的输出轴穿透承载块(31)连接有主动齿轮(35),承载块(31)上设置有可转动的从动齿轮(36),所述从动齿轮(36)和主动齿轮(35)啮合,所述固定座(34)连接在从动齿轮(36)上,固定座(34)上对称设置有两个夹爪(37),所述夹爪(37)通过所述力学反馈传感器(39)与固定座(34)铰接,夹爪(37)的铰接端设置有不完全齿轮,所述第二液压缸(33)的固定端铰接在延展臂关节(24)上,第二液压缸(33)的自由端连接有齿条(38),所述齿条(38)与夹爪(37)的不完全齿轮啮合。
6.根据权利要求1所述的具有反馈系统的六自由度水下功能作业机械手,其特征在于:所述肩部关节框架(21)和大臂关节(22)之间设置有第三液压缸(26),大臂关节(22)和小臂关节(23)之间设置有第四液压缸(27),小臂关节(23)和延展臂关节(24)之间设置有第五液压缸(28)。
7.根据权利要求4所述的具有反馈系统的六自由度水下功能作业机械手,其特征在于:所述悬挂外壳(251)的外侧壁上和或设置有法兰盘(256)。
8.根据权利要求5所述的具有反馈系统的六自由度水下功能作业机械手,其特征在于:所述延展臂关节(24)上设置有托块(241),旋转舵机(32)和第二液压缸(33)均穿透设置在所述托块(241)上。
9.根据权利要求3所述的具有反馈系统的六自由度水下功能作业机械手,其特征在于:所述垂坐外壳(121)在位于第一电位器(122)转轴伸出的端部设置有组合密封垫(125),第一封板(123)上套设有密封圈。
10.根据权利要求4所述的具有反馈系统的六自由度水下功能作业机械手,其特征在于:所述悬挂外壳(251)在连接轴(253)伸出的端部设置有密封环(255),所述密封环(255)套装在连接轴(253)上,所述第二封板(254)上套设有密封圈。
技术总结
本技术涉及机械手技术领域,尤其公开了一种具有反馈系统的六自由度水下功能作业机械手,旋转底座单元,底座单元包括底座本体、垂坐式角度反馈装置和底座回转装置;摆臂单元,摆臂单元包括依次枢轴连接的肩部关节框架、大臂关节、小臂关节和延展臂关节;爪部单元,爪部单元设置在延展臂关节上,爪部单元上设置有力学反馈传感器。本技术六自由度的设计使得整个机械手系统具有较高的灵活性,能满足水下作业空间运动的需求,电位器使得各关节的运动及时的反馈给上位控制系统,做到实时准确的定位控制,夹爪上设置力学反馈传感器,可通过调节爪部抓取物体的力的大小可以满足多种物品的抓取,实现爪部功能作业的多元化。
技术研发人员:杨卓懿,郝志韬,刘汉强,朱金霄
受保护的技术使用者:山东交通学院
技术研发日:20230901
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!