一种自适应夹爪机构的制作方法
本技术应用于自适应夹爪的,特别涉及一种自适应夹爪机构。
背景技术:
1、目前市面上的夹爪机构需要由单独的机构对物料进行定位,成本较高;同时需要通过ccd视觉定位或先将物料放到整定机构上二次定位,且难以实现同时取放多个物料,效率较低,夹爪与产品接触面不匹配取放时受力不均会导致产品损坏,导致生产效率比较低。如果能设计出一种结构简单,可以夹取同时具有不同形状的物料,且能同时夹取多个物料的自适应夹爪机构,则能够解决上述问题。
技术实现思路
1、本实用新型所要解决的技术问题是克服现有技术的不足,提供了一种实现同时夹取、翻转、再次夹取、放置多件物料的功能,并在夹取过程中纠正产品状态及位置,达到自适应浮动效果的自适应夹爪机构。
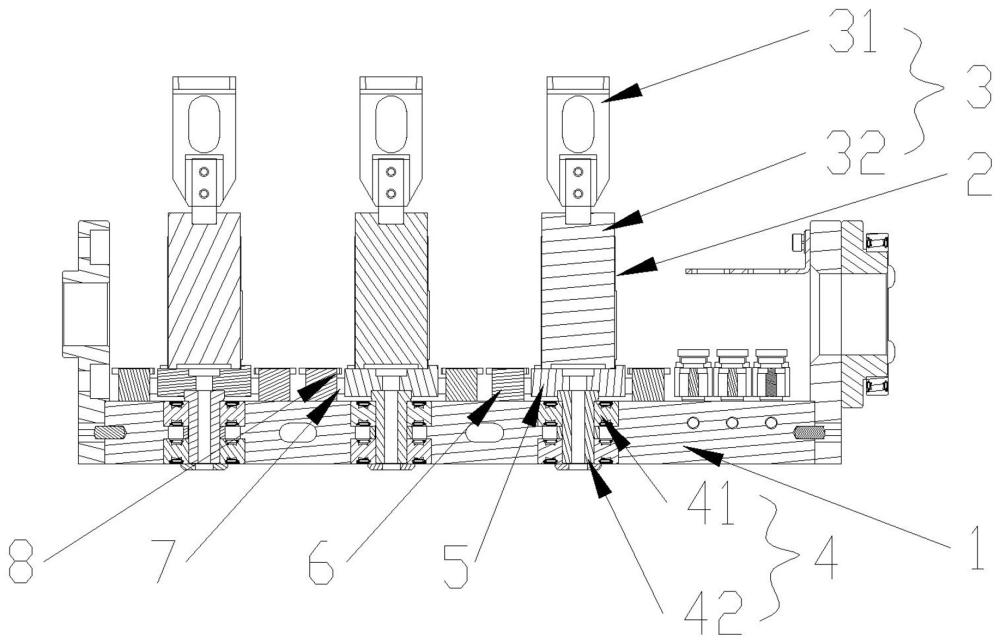
2、本实用新型所采用的技术方案是:本实用新型包括浮动夹爪支架和设置在所述浮动夹爪支架上的若干浮动夹爪,所述浮动夹爪包括夹爪装置和浮动装置,所述夹爪装置包括气动夹爪和设置在所述气动夹爪活动爪上的包胶夹爪,所述夹爪装置设置在气动夹爪安装板上,所述浮动装置包括转轴和轴承,所述气动夹爪安装板设置在所述转轴上,所述转轴通过所述轴承转动配合在所述浮动夹爪支架上。
3、进一步地,所述浮动夹爪支架上设置有若干个弹簧安装板,若干所述弹簧安装板分布在所述气动夹爪安装板的两侧,所述弹簧安装板和所述气动夹爪安装板之间设置有若干弹簧。
4、进一步地,所述弹簧安装板上设置有若干旋转限位器,所述浮动夹爪转动时,所述气动夹爪安装板的侧面与所述旋转限位器的端部限位配合。
5、进一步地,所述浮动夹爪在所述浮动夹爪支架上在±9°的范围内转动。
6、进一步地,所述自适应夹爪机构还包括翻转组件,所述浮动夹爪支架一端和所述翻转组件的旋转气缸的活动端相连接,所述浮动夹爪支架的另一端转动配合在所述翻转组件上。
7、进一步地,所述翻转组件顶部设置有传感器,所述包胶夹爪中间设置有空洞,当所述浮动夹爪夹取物料后向上翻转,所述传感器和所述包胶夹爪上的所述空洞平行,所述传感器的传感信号穿过所述空洞,所述传感器与所述空洞配合进行物料检测。
8、进一步地,所述自适应夹爪机构还包括放料夹爪组件,所述放料夹爪组件包括固定夹爪支架和固定夹爪,所述固定夹爪包括平面气动夹爪和设置在所述平面气动夹爪活动爪上的平面包胶夹爪,所述固定夹爪支架的顶部设置有与外部机械手相适配的机械手臂安装口。
9、进一步地,所述包胶夹爪和物料接触面均为圆弧面,所述包胶夹爪末端设置圆弧面柔性胶层。
10、进一步地,所述平面包胶夹爪与物料接触面为平面,所述平面包胶夹爪末端设置平面柔性胶层。
11、本实用新型的有益效果是:由于本实用新型包括浮动夹爪、浮动夹爪支架、翻转组件以及放料夹爪组件,所述浮动夹爪包含浮动装置和夹爪装置,所述放料夹爪组件包含固定夹爪和固定夹爪支架,当所述浮动夹爪夹取物料后,所述固定夹爪在所述浮动夹爪上二次夹取所述物料,所述浮动装置在±9°的范围内转动,可以达到自适应纠正所述物料角度的效果,无需设计单独的整定机构对物料进行二次定位,且所述自适应夹爪机构设置多个所述浮动夹爪和所述固定夹爪,可同时夹取多个所述物料,具有效率高,成本低,结构简单的优点。
技术特征:
1.一种自适应夹爪机构,包括浮动夹爪支架(1)和设置在所述浮动夹爪支架(1)上的若干浮动夹爪(2),其特征在于:所述浮动夹爪(2)包括夹爪装置(3)和浮动装置(4),所述夹爪装置(3)包括气动夹爪(32)和设置在所述气动夹爪(32)活动爪上的包胶夹爪(31),所述夹爪装置(3)设置在气动夹爪安装板(5)上,所述浮动装置(4)包括转轴(41)和轴承(42),所述气动夹爪安装板(5)设置在所述转轴(41)上,所述转轴(41)通过所述轴承(42)转动配合在所述浮动夹爪支架(1)上。
2.根据权利要求1所述的一种自适应夹爪机构,其特征在于:所述浮动夹爪支架(1)上设置有若干个弹簧安装板(6),若干所述弹簧安装板(6)分布在所述气动夹爪安装板(5)的两侧,所述弹簧安装板(6)和所述气动夹爪安装板(5)之间设置有若干弹簧(7)。
3.根据权利要求2所述的一种自适应夹爪机构,其特征在于:所述弹簧安装板(6)上设置有若干旋转限位器(8),所述浮动夹爪(2)转动时,所述气动夹爪安装板(5)的侧面与所述旋转限位器(8)的端部限位配合。
4.根据权利要求3所述的一种自适应夹爪机构,其特征在于:所述浮动夹爪(2)在所述浮动夹爪支架(1)上在±9°的范围内转动。
5.根据权利要求1所述的一种自适应夹爪机构,其特征在于:所述自适应夹爪机构还包括翻转组件(9),所述浮动夹爪支架(1)一端和所述翻转组件(9)的旋转气缸(10)的活动端相连接,所述浮动夹爪支架(1)的另一端转动配合在所述翻转组件(9)上。
6.根据权利要求5所述的一种自适应夹爪机构,其特征在于:所述翻转组件(9)顶部设置有传感器(11),所述包胶夹爪(31)中间设置有空洞(12),当所述浮动夹爪(2)夹取物料(17)后向上翻转,所述传感器(11)和所述包胶夹爪(31)上的所述空洞(12)平行,所述传感器(11)的传感信号穿过所述空洞(12),所述传感器(11)与所述空洞(12)配合进行物料检测。
7.根据权利要求1所述的一种自适应夹爪机构,其特征在于:所述自适应夹爪机构还包括放料夹爪组件(13),所述放料夹爪组件(13)包括固定夹爪支架(14)和固定夹爪(15),所述固定夹爪(15)包括平面气动夹爪(51)和设置在所述平面气动夹爪(51)活动爪上的平面包胶夹爪(52),所述固定夹爪支架(14)的顶部设置有与外部机械手相适配的机械手臂安装口(16)。
8.根据权利要求1所述的一种自适应夹爪机构,其特征在于:所述包胶夹爪(31)和物料(17)接触面均为圆弧面,所述包胶夹爪(31)末端设置圆弧面柔性胶层。
9.根据权利要求7所述的一种自适应夹爪机构,其特征在于:所述平面包胶夹爪(52)与物料(17)接触面为平面,所述平面包胶夹爪(52)末端设置平面柔性胶层。
技术总结
本技术公开了一种自适应夹爪机构,旨在提供一种实现同时夹取、翻转、再次夹取、放置多件物料的功能,并在夹取过程中纠正产品状态及位置,达到自适应效果的夹爪机构。本技术包括浮动夹爪支架和设置在所述浮动夹爪支架上的若干浮动夹爪,所述浮动夹爪包括夹爪装置和浮动装置,所述夹爪装置包括气动夹爪和设置在所述气动夹爪活动爪上的包胶夹爪,所述夹爪装置设置在气动夹爪安装板上,所述浮动装置包括转轴和轴承,所述气动夹爪安装板设置在所述转轴上,所述转轴通过所述轴承转动配合在所述浮动夹爪支架上。本技术应用于自适应夹爪的技术领域。
技术研发人员:李志,阳斌,董争武,杨海根,朱隆贵,徐记新,李新剑
受保护的技术使用者:珠海博杰电子股份有限公司
技术研发日:20230904
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!