一种防震机械手装置
本技术涉及机械手装置,特别是涉及一种防震机械手装置。
背景技术:
1、机械手是用来抓持工件(或工具)的部件,其根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。随着现代工业的不断发展,机械手越来越多的被应用于各种行业。
2、中国专利cn205255018u公开了一种防震机械手装置,可对塑料或者其他质软工件进行夹持,可有效避免工件表面容易受到损伤的情况出现,但其在机械爪的上下移动过程中,由于机械运动产生的震动和惯性,容易使工件掉落,因此亟需一种防震机械手装置来解决。
技术实现思路
1、本实用新型的目的是提供一种防震机械手装置,以解决上述问题,达到减少机械爪移动过程中的震动,避免工件掉落的目的。
2、为实现上述目的,本实用新型提供了如下方案:
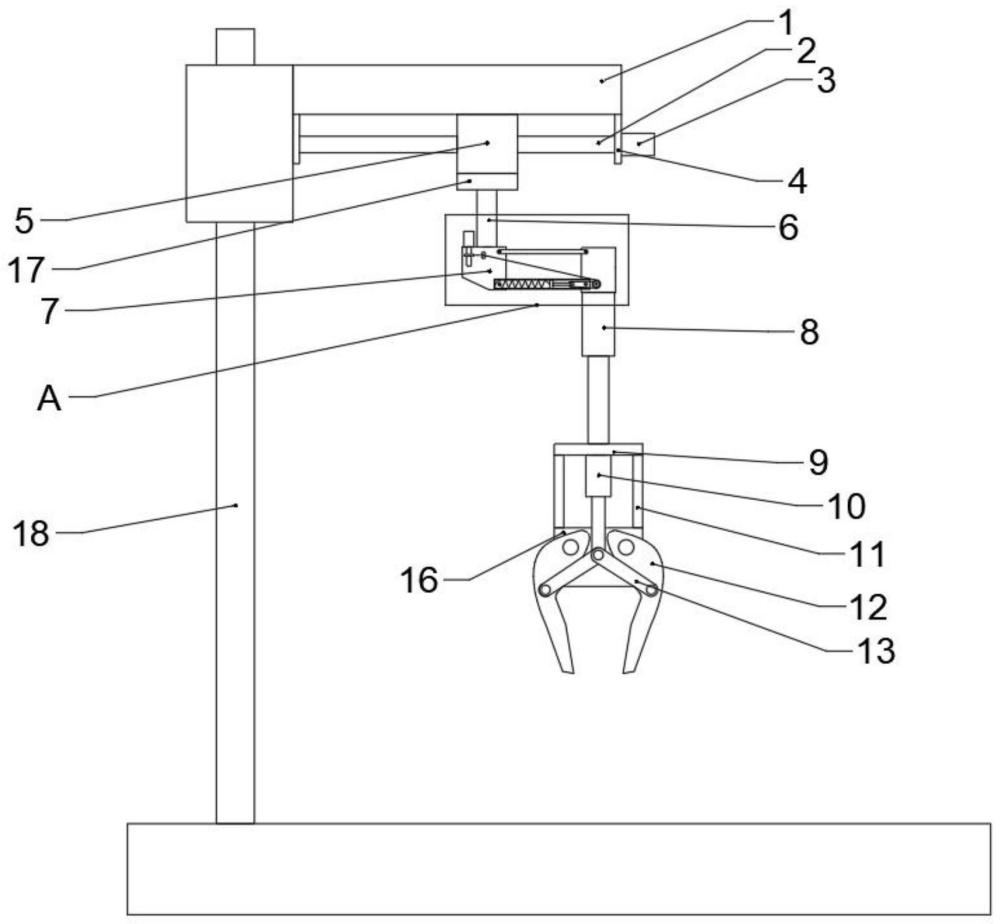
3、一种防震机械手装置,包括减震装置,所述减震装置顶部一端固接有第一连杆,所述第一连杆顶部固接有转动部,所述转动部顶部固接有螺纹块,所述螺纹块传动连接有横移部,所述减震装置底部一端固接有第一伸缩部,所述第一伸缩部的活动端固接有机械爪座,所述机械爪座底部固接有抓取部。
4、优选的,所述减震装置包括第一减震座,所述第一减震座顶部与所述第一连杆底部固接,所述第一减震座的一侧设置有第二减震座,所述第一减震座和所述第二减震座靠近一端的顶部和底部分别铰接有第三连杆和第四连杆,所述第一减震座、所述第二减震座、所述第三连杆和所述第四连杆两两铰接并形成平行四边形结构,所述第四连杆内固接有弹性调节部的一端,所述弹性调节部的另一端与所述第二减震座转动连接,所述弹性调节部位于所述第二减震座的一端传动连接有驱动部,所述驱动部与所述第一减震座顶部固接,所述第二减震座底部与所述第一伸缩部顶部固接。
5、优选的,所述弹性调节部包括弹簧,所述弹簧位于所述第四连杆内,所述弹簧的一端与所述第四连杆一端内壁固接,所述弹簧的另一端固接有滑块,所述滑块与所述第四连杆内壁接触并滑动设置,所述滑块的另一端固接有第五连杆,所述第五连杆的端部转动连接有第一导轮,所述第一导轮通过钢丝绳传动连接有第三导轮,所述第三导轮一侧固接有第二导轮,所述第二导轮与所述第二减震座转动连接,所述钢丝绳的一端缠绕在所述第三导轮上,所述钢丝绳的另一端绕过所述第一导轮,经所述第二导轮侧壁与所述驱动部传动连接。
6、优选的,所述驱动部包括第三电机,所述第三电机的固定端与所述第一减震座顶部一端固接,所述第三电机的输出轴固接有卷线轮,所述卷线轮靠近所述第二减震座一侧设置有两对称设置的第四导轮,所述第四导轮与所述第一减震座转动连接,两所述第四导轮的对称轴与所述卷线轮转动轴的中点共线设置且空间垂直,所述钢丝绳的一端通过两所述第四导轮之间缠绕在所述卷线轮上。
7、优选的,所述第一伸缩部包括第一伸缩杆,所述第一伸缩杆的固定端与所述第二减震座底部固接,所述第一伸缩杆的活动端与所述机械爪座顶部固接。
8、优选的,所述抓取部包括爪盘,所述爪盘两端固接有两第二支架的一端,两所述第二支架的另一端与所述机械爪座底部固接,所述爪盘对称设置有两第一爪,所述第一爪与所述爪盘转动连接,所述第一爪的中部铰接有第二连杆的一端,两所述第二连杆的另一端铰接有第二伸缩部的一端,所述第二伸缩部的另一端与所述机械爪座底部固接。
9、优选的,所述第二伸缩部包括第二伸缩杆,所述第二伸缩杆的固定端与所述机械爪座底部固接,所述第二伸缩杆的活动端与两所述第二连杆的一端铰接。
10、优选的,所述转动部包括第二电机,所述第二电机的固定端与所述螺纹块底部固接,所述第二电机的输出端与所述第一减震座顶部固接。
11、优选的,所述横移部包括底座,所述底座底部两端分别固接有第一支架,两所述第一支架之间转动连接有螺纹杆,所述螺纹杆的一端固接有第一电机的输出端,所述第一电机的固定端与任一所述第一支架侧壁固接,所述螺纹杆与所述螺纹块螺纹连接,所述螺纹块的顶部与所述底座底部接触并滑动设置。
12、本实用新型具有如下技术效果:使用时,通过抓取部抓取工件,通过第一伸缩部可以调整抓取部的高度以便于工件的顺利抓取和移动,转动部可驱动抓取部实现抓取部所在平面内的转动,便于工件的移动,同时横移部可以调整抓取部水平位置,进一步增加了抓取部的移动范围。当横移部的一端沿立柱上下移动时,通过减震装置可减少抓取部移动过程中产生的竖向震动,避免工件被震落,大大提高工件抓取的稳定性。
技术特征:
1.一种防震机械手装置,其特征在于:包括减震装置(7),所述减震装置(7)顶部一端固接有第一连杆(6),所述第一连杆(6)顶部固接有转动部,所述转动部顶部固接有螺纹块(5),所述螺纹块(5)传动连接有横移部,所述减震装置(7)底部一端固接有第一伸缩部,所述第一伸缩部的活动端固接有机械爪座(9),所述机械爪座(9)底部固接有抓取部。
2.根据权利要求1所述一种防震机械手装置,其特征在于:所述减震装置(7)包括第一减震座(701),所述第一减震座(701)顶部与所述第一连杆(6)底部固接,所述第一减震座(701)的一侧设置有第二减震座(712),所述第一减震座(701)和所述第二减震座(712)靠近一端的顶部和底部分别铰接有第三连杆(704)和第四连杆(705),所述第一减震座(701)、所述第二减震座(712)、所述第三连杆(704)和所述第四连杆(705)两两铰接并形成平行四边形结构,所述第四连杆(705)内固接有弹性调节部的一端,所述弹性调节部的另一端与所述第二减震座(712)转动连接,所述弹性调节部位于所述第二减震座(712)的一端传动连接有驱动部,所述驱动部与所述第一减震座(701)顶部固接,所述第二减震座(712)底部与所述第一伸缩部顶部固接。
3.根据权利要求2所述一种防震机械手装置,其特征在于:所述弹性调节部包括弹簧(706),所述弹簧(706)位于所述第四连杆(705)内,所述弹簧(706)的一端与所述第四连杆(705)一端内壁固接,所述弹簧(706)的另一端固接有滑块(707),所述滑块(707)与所述第四连杆(705)内壁接触并滑动设置,所述滑块(707)的另一端固接有第五连杆(708),所述第五连杆(708)的端部转动连接有第一导轮(709),所述第一导轮(709)通过钢丝绳(713)传动连接有第三导轮(711),所述第三导轮(711)一侧固接有第二导轮(710),所述第二导轮(710)与所述第二减震座(712)转动连接,所述钢丝绳(713)的一端缠绕在所述第三导轮(711)上,所述钢丝绳(713)的另一端绕过所述第一导轮(709),经所述第二导轮(710)侧壁与所述驱动部传动连接。
4.根据权利要求3所述一种防震机械手装置,其特征在于:所述驱动部包括第三电机(702),所述第三电机(702)的固定端与所述第一减震座(701)顶部一端固接,所述第三电机(702)的输出轴固接有卷线轮(703),所述卷线轮(703)靠近所述第二减震座(712)一侧设置有两对称设置的第四导轮(714),所述第四导轮(714)与所述第一减震座(701)转动连接,两所述第四导轮(714)的对称轴与所述卷线轮(703)转动轴的中点共线设置且空间垂直,所述钢丝绳(713)的一端通过两所述第四导轮(714)之间缠绕在所述卷线轮(703)上。
5.根据权利要求2所述一种防震机械手装置,其特征在于:所述第一伸缩部包括第一伸缩杆(8),所述第一伸缩杆(8)的固定端与所述第二减震座(712)底部固接,所述第一伸缩杆(8)的活动端与所述机械爪座(9)顶部固接。
6.根据权利要求1所述一种防震机械手装置,其特征在于:所述抓取部包括爪盘(16),所述爪盘(16)两端固接有两第二支架(11)的一端,两所述第二支架(11)的另一端与所述机械爪座(9)底部固接,所述爪盘(16)对称设置有两第一爪(12),所述第一爪(12)与所述爪盘(16)转动连接,所述第一爪(12)的中部铰接有第二连杆(13)的一端,两所述第二连杆(13)的另一端铰接有第二伸缩部的一端,所述第二伸缩部的另一端与所述机械爪座(9)底部固接。
7.根据权利要求6所述一种防震机械手装置,其特征在于:所述第二伸缩部包括第二伸缩杆(10),所述第二伸缩杆(10)的固定端与所述机械爪座(9)底部固接,所述第二伸缩杆(10)的活动端与两所述第二连杆(13)的一端铰接。
8.根据权利要求2所述一种防震机械手装置,其特征在于:所述转动部包括第二电机(17),所述第二电机(17)的固定端与所述螺纹块(5)底部固接,所述第二电机(17)的输出端与所述第一减震座(701)顶部固接。
9.根据权利要求1所述一种防震机械手装置,其特征在于:所述横移部包括底座(1),所述底座(1)底部两端分别固接有第一支架(4),两所述第一支架(4)之间转动连接有螺纹杆(2),所述螺纹杆(2)的一端固接有第一电机(3)的输出端,所述第一电机(3)的固定端与任一所述第一支架(4)侧壁固接,所述螺纹杆(2)与所述螺纹块(5)螺纹连接,所述螺纹块(5)的顶部与所述底座(1)底部接触并滑动设置。
技术总结
本技术涉及机械手装置技术领域,特别是涉及一种防震机械手装置,包括减震装置,减震装置顶部一端固接有第一连杆,第一连杆顶部固接有转动部,转动部顶部固接有螺纹块,螺纹块传动连接有横移部,减震装置底部一端固接有第一伸缩部,第一伸缩部的活动端固接有机械爪座,机械爪座底部固接有抓取部。本技术可以达到减少机械爪移动过程中的震动,避免工件掉落的目的。
技术研发人员:陈小红,姜晓强,尹林志,邹金桥,陶勇,顾其俊,赵传强
受保护的技术使用者:浙江机电职业技术学院
技术研发日:20230904
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!