一种抽屉式配送机器人的制作方法
本技术涉及机器人,尤其涉及一种抽屉式配送机器人。
背景技术:
1、随着机器人行业的不断发展,机器人的种类和性能也逐渐多样化,以满足不同行业的智能化需求。例如,物流机器人、传菜机器人等具有物品配送功能的机器人,其通常设置有用于存放物品的舱体。比较常见的舱体一般有蝶异门式、旋转门式和抽屉式等,其中,抽屉式是最符合人机工程学的舱体方式。
2、然而,目前市场上,抽屉式舱体大多为双仓,这会限制最大配送单数和效率;或者,有多个舱体直接阵列排布设置,但这会使得机器人的占用空间较大,也会显得比较笨重。
技术实现思路
1、本实用新型实施例的目的在于,解决现有抽屉式配送机器人单次配送量不多、显得笨重的技术问题。
2、为了解决上述技术问题,本实用新型实施例提供一种抽屉式配送机器人,采用了如下所述的技术方案:
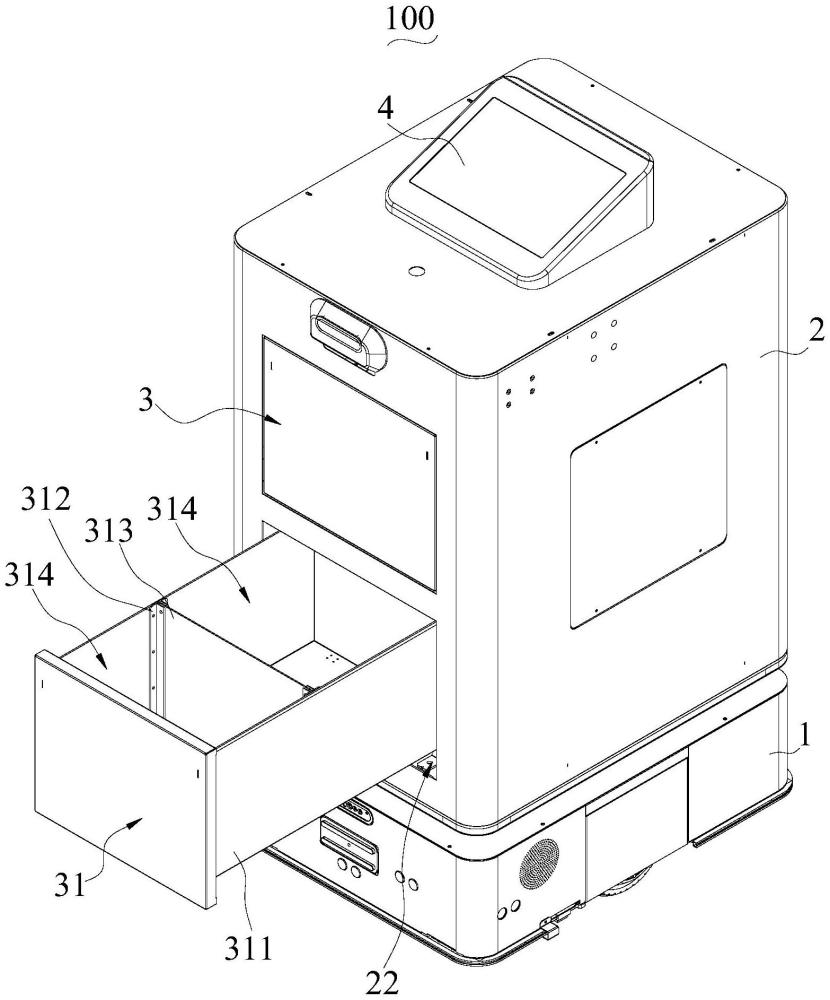
3、所述抽屉式配送机器人包括移动底盘、上装模组和舱体组件,所述上装模组设置于所述移动底盘上、内部形成有安装腔,外壁上开设有与所述安装腔相通的舱口;所述舱体组件包括置物舱、限位组件和开合控制组件;
4、所述置物舱,沿其延伸方向形成有至少两个置物腔;所述置物舱滑动设置于所述安装腔,且能滑出所述舱口以使所述置物腔外露于所述置物舱;
5、所述限位组件,用于对所述置物舱的滑行位置进行限定;
6、所述开合控制组件,设置于所述安装腔内、信号连接所述限位组件,并带动所述置物舱滑行,以控制所述置物舱滑出所述舱口的开合量。
7、进一步地,在一些实施例的优选方案中,所述置物舱包括舱壳、分隔支架和分隔板,所述舱壳在所述开合控制组件的带动下滑动设置于所述安装腔、并能滑出所述舱口,且所述舱壳的外壁和所述上装模组之间设置有所述限位组件;所述分隔支架设置于所述舱壳的内壁上,所述分隔板沿所述舱壳的内腔的深度方向插装于所述分隔支架,以将所述舱壳的内腔划分出至少两个所述置物腔。
8、进一步地,在一些实施例的优选方案中,所述分隔支架设置有两个,两个所述分隔支架相对设置、并均开设有与所述舱壳的内腔相通的限位滑槽;所述分隔板的相对两端分别拆卸式插接于两个所述限位滑槽内,以将所述舱壳的内腔沿所述舱壳的滑行方向划分出两个所述置物腔。
9、进一步地,在一些实施例的优选方案中,所述分隔板的端部和所述限位滑槽的槽壁中的其中一个设置有凸部,另一个设置有凹部,在所述分隔板与所述分隔支架插装时,所述凸部和所述凹部凹凸配合。
10、进一步地,在一些实施例的优选方案中,所述开合控制组件包括驱动件和传动组件,所述驱动件信号连接所述限位组件;所述传动组件沿所述置物舱的延伸方向设置于所述驱动件的输出端上,并能带动所述置物舱滑进或滑出所述舱口,及能使所述置物舱停留在所述限位组件限制的位置上。
11、进一步地,在一些实施例的优选方案中,所述传动组件包括丝杠和第一滑块,所述丝杠沿所述置物舱的延伸方向设置于所述驱动件的输出端上,所述第一滑块滑动设置于所述丝杠上、并连接有所述舱壳。
12、进一步地,在一些实施例的优选方案中,所述开合控制组件还包括导向组件,所述导向组件包括安装架、导轨和第二滑块,所述安装架设置于所述安装腔内,所述导轨沿所述舱壳的延伸方向设置于所述安装架上;所述第二滑块滑动设置于所述导轨上、并设置有所述舱壳。
13、进一步地,在一些实施例的优选方案中,所述限位组件包括限位件和限位传感器,所述限位传感器信号连接所述驱动件;所述舱壳的外壁和所述上装模组中的其中一个设置有所述限位件,另一个设置有与所述限位件配合限位的所述限位传感器。
14、进一步地,在一些实施例的优选方案中,所述舱壳的外壁上设置有所述限位件,所述上装模组在所述安装腔内设置有三个所述限位传感器;三个所述限位传感器分别为沿所述舱壳的延伸方向依次设置的第一传感器、第二传感器和第三传感器。
15、进一步地,在一些实施例的优选方案中,所述舱体组件和所述舱口均设置至少两个,至少两个所述舱体组件沿所述上装模组的高度方向并列设置,各所述舱体组件的所述置物舱与所述舱口一一对应设置;且相邻的两个所述舱体组件在所述安装腔内通过隔层板分隔。
16、与现有技术相比,本实用新型实施例提供的抽屉式配送机器人主要有以下
17、有益效果:
18、该抽屉式配送机器人通过在单个置物舱内沿其延伸方向形成至少两个置物腔,并在限位组件和开合控制组件的配合下,自动控制置物舱的开合量,使对应置物腔外露于上装模组,以实现不同置物腔的物品拿取。这样通过在同一置物舱内隐藏多个置物腔的结构方式,利于保证单次具有较多的配送量,同时利于缩小抽屉式配送机器人的占用空间,总体上,该抽屉式配送机器人的整体结构紧凑,配送量多且小巧。
技术特征:
1.一种抽屉式配送机器人,其特征在于,所述抽屉式配送机器人包括移动底盘、上装模组和舱体组件,所述上装模组设置于所述移动底盘上、内部形成有安装腔,外壁上开设有与所述安装腔相通的舱口;所述舱体组件包括置物舱、限位组件和开合控制组件;
2.根据权利要求1所述的抽屉式配送机器人,其特征在于,所述置物舱包括舱壳、分隔支架和分隔板,所述舱壳在所述开合控制组件的带动下滑动设置于所述安装腔、并能滑出所述舱口,且所述舱壳的外壁和所述上装模组之间设置有所述限位组件;所述分隔支架设置于所述舱壳的内壁上,所述分隔板沿所述舱壳的内腔的深度方向插装于所述分隔支架,以将所述舱壳的内腔划分出至少两个所述置物腔。
3.根据权利要求2所述的抽屉式配送机器人,其特征在于,所述分隔支架设置有两个,两个所述分隔支架相对设置、并均开设有与所述舱壳的内腔相通的限位滑槽;所述分隔板的相对两端分别拆卸式插接于两个所述限位滑槽内,以将所述舱壳的内腔沿所述舱壳的滑行方向划分出两个所述置物腔。
4.根据权利要求3所述的抽屉式配送机器人,其特征在于,所述分隔板的端部和所述限位滑槽的槽壁中的其中一个设置有凸部,另一个设置有凹部,在所述分隔板与所述分隔支架插装时,所述凸部和所述凹部凹凸配合。
5.根据权利要求2所述的抽屉式配送机器人,其特征在于,所述开合控制组件包括驱动件和传动组件,所述驱动件信号连接所述限位组件;所述传动组件沿所述置物舱的延伸方向设置于所述驱动件的输出端上,并能带动所述置物舱滑进或滑出所述舱口,及能使所述置物舱停留在所述限位组件限制的位置上。
6.根据权利要求5所述的抽屉式配送机器人,其特征在于,所述传动组件包括丝杠和第一滑块,所述丝杠沿所述置物舱的延伸方向设置于所述驱动件的输出端上,所述第一滑块滑动设置于所述丝杠上、并连接有所述舱壳。
7.根据权利要求5所述的抽屉式配送机器人,其特征在于,所述开合控制组件还包括导向组件,所述导向组件包括安装架、导轨和第二滑块,所述安装架设置于所述安装腔内,所述导轨沿所述舱壳的延伸方向设置于所述安装架上;所述第二滑块滑动设置于所述导轨上、并设置有所述舱壳。
8.根据权利要求5所述的抽屉式配送机器人,其特征在于,所述限位组件包括限位件和限位传感器,所述限位传感器信号连接所述驱动件;所述舱壳的外壁和所述上装模组中的其中一个设置有所述限位件,另一个设置有与所述限位件配合限位的所述限位传感器。
9.根据权利要求8所述的抽屉式配送机器人,其特征在于,所述舱壳的外壁上设置有所述限位件,所述上装模组在所述安装腔内设置有三个所述限位传感器;三个所述限位传感器分别为沿所述舱壳的延伸方向依次设置的第一传感器、第二传感器和第三传感器。
10.根据权利要求1至9任一项所述的抽屉式配送机器人,其特征在于,所述舱体组件和所述舱口均设置至少两个,至少两个所述舱体组件沿所述上装模组的高度方向并列设置,各所述舱体组件的所述置物舱与所述舱口一一对应设置;且相邻的两个所述舱体组件在所述安装腔内通过隔层板分隔。
技术总结
本技术属于机器人技术领域,涉及一种抽屉式配送机器人,包括移动底盘、上装模组和舱体组件,上装模组设置于移动底盘上、内部形成有安装腔,外壁上开设有与安装腔相通的舱口;舱体组件包括置物舱、限位组件和开合控制组件;置物舱,沿其延伸方向形成有至少两个置物腔;置物舱滑动设置于安装腔,且能滑出舱口以使置物腔外露于置物舱;限位组件,用于对置物舱的滑行位置进行限定;开合控制组件,设置于安装腔内、信号连接限位组件,并带动置物舱滑行,以控制置物舱滑出舱口的开合量。该抽屉式配送机器人采用同一置物舱内隐藏多个置物腔的结构,使得整体结构比较紧凑,配送量多且小巧。
技术研发人员:吴覃明
受保护的技术使用者:深圳竹芒科技有限公司
技术研发日:20230831
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!