四轴立柱摆臂式机器人的制作方法
本技术涉及机器人,具体为四轴立柱摆臂式机器人。
背景技术:
1、近年来,随着劳动力成本不断上涨,传统制造业正逐渐向智能化转型,工业机器人因其低成本、高效率等优点,被应用至各个领域,呈现出强劲的发展态势。
2、而现如今市面上的四轴立柱摆臂式机器人在使用前需要多名工作人员将机器人整体搬运到座体上,然后使用者需要使用工具反复对多个螺钉操作才能对其进行安装,操作较为繁琐,安装较为麻烦。
3、因此,需要设计四轴立柱摆臂式机器人来解决上述提出的问题。
技术实现思路
1、本实用新型的目的在于提供四轴立柱摆臂式机器人,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
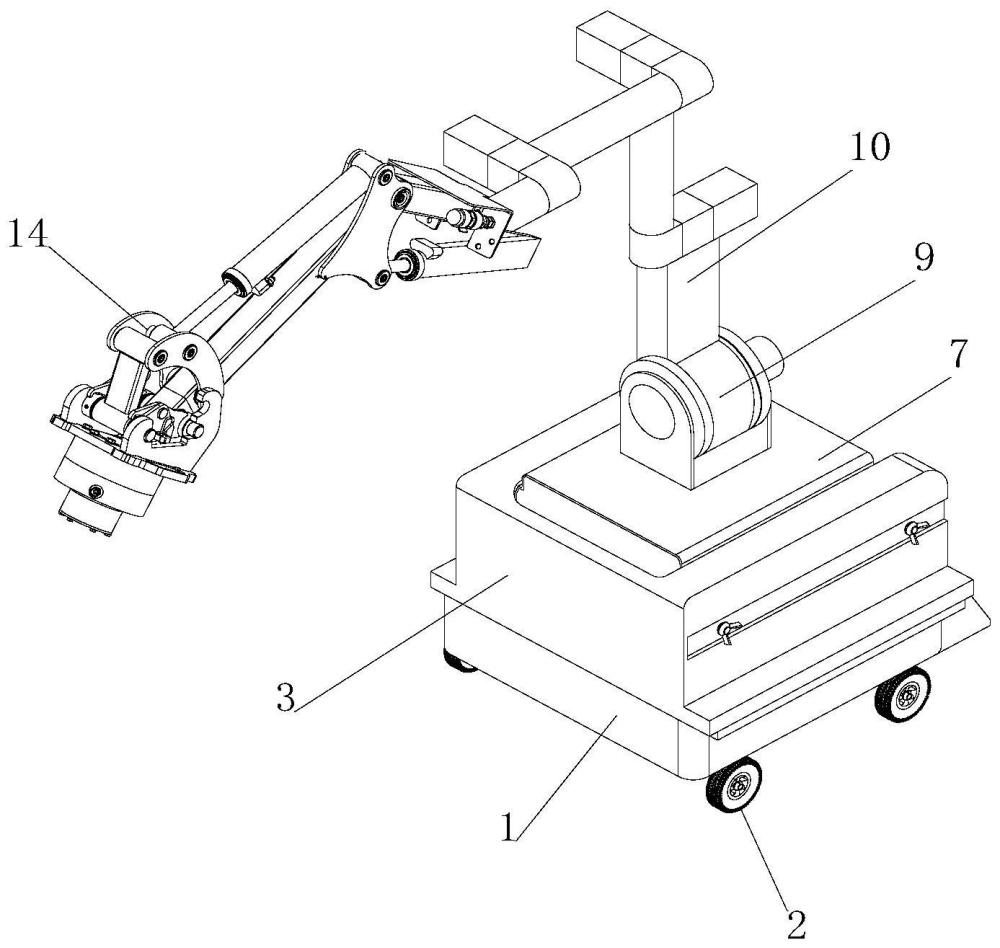
3、四轴立柱摆臂式机器人,包括底座,所述底座的底部四个拐角处固定安装有电动轮,所述底座的顶部固定安装有安装座,所述安装座的顶部开设有一个槽体,在该所述槽体内部的左右两侧均开设有滑动轨道,所述槽体的内部下方开设有轮槽,所述轮槽的内部连接有小型滚轮,在所述小型滚轮的顶部固定安装有机器人座体,所述机器人座体的左右两侧均设置有滑动块,所述机器人座体的内部连接有转动轴体,所述转动轴体的顶部连接有支撑立柱,所述支撑立柱的顶部连接有第一机械臂,在所述第一机械臂的上方设置有第二机械臂,在所述第二机械臂的一侧设置有第三机械臂,所述第三机械臂远离第二机械臂的一侧连接有机器人本体,在所述机器人本体上还设置有液压杆。
4、作为本实用新型优选的方案,两侧所述滑动块和槽体内部左右两侧的滑动轨道对应设置,且滑动块和滑动轨道的内部进行滑动连接。
5、作为本实用新型优选的方案,在两侧所述滑动块上开设有第二连接孔,在所述滑动轨道的内部开设有和第二连接孔对应设置的第一连接孔,且所述第一连接孔和第二连接孔之间采用固定螺栓进行锁紧固定。
6、作为本实用新型优选的方案,所述小型滚轮位于轮槽的内部进行滚动,且小型滚轮的顶部和机器人座体的底部通过螺丝固定安装。
7、作为本实用新型优选的方案,所述第一机械臂、第二机械臂以及第三机械臂的一侧均传动连接有驱动电机,该所述驱动电机的控制端和机器人上的总控制端进行电性连接。
8、作为本实用新型优选的方案,所述安装座的一侧还设置有斜坡,且该斜坡的一侧连通于槽体内部。
9、与现有技术相比,本实用新型的有益效果是:
10、本实用新型中,通过设置的四轴立柱摆臂式机器人,在使用该四轴立柱摆臂式机器人时,可利用机器人座体下方的小型滚轮在地面进行滚动,然后从一侧的斜板送入到安装座内部的槽体内,最后再通过固定螺栓进行锁紧固定,进而方便对机器人整体进行固定安装。
技术特征:
1.四轴立柱摆臂式机器人,包括底座(1),其特征在于:所述底座(1)的底部四个拐角处固定安装有电动轮(2),所述底座(1)的顶部固定安装有安装座(3),所述安装座(3)的顶部开设有一个槽体,在该所述槽体内部的左右两侧均开设有滑动轨道(4),所述槽体的内部下方开设有轮槽(5),所述轮槽(5)的内部连接有小型滚轮(6),在所述小型滚轮(6)的顶部固定安装有机器人座体(7),所述机器人座体(7)的左右两侧均设置有滑动块(8),所述机器人座体(7)的内部连接有转动轴体(9),所述转动轴体(9)的顶部连接有支撑立柱(10),所述支撑立柱(10)的顶部连接有第一机械臂(11),在所述第一机械臂(11)的上方设置有第二机械臂(12),在所述第二机械臂(12)的一侧设置有第三机械臂(13),所述第三机械臂(13)远离第二机械臂(12)的一侧连接有机器人本体(14),在所述机器人本体(14)上还设置有液压杆(15)。
2.根据权利要求1所述的四轴立柱摆臂式机器人,其特征在于:两侧所述滑动块(8)和槽体内部左右两侧的滑动轨道(4)对应设置,且滑动块(8)和滑动轨道(4)的内部进行滑动连接。
3.根据权利要求1所述的四轴立柱摆臂式机器人,其特征在于:在两侧所述滑动块(8)上开设有第二连接孔(81),在所述滑动轨道(4)的内部开设有和第二连接孔(81)对应设置的第一连接孔(82),且所述第一连接孔(82)和第二连接孔(81)之间采用固定螺栓(16)进行锁紧固定。
4.根据权利要求1所述的四轴立柱摆臂式机器人,其特征在于:所述小型滚轮(6)位于轮槽(5)的内部进行滚动,且小型滚轮(6)的顶部和机器人座体(7)的底部通过螺丝固定安装。
5.根据权利要求1所述的四轴立柱摆臂式机器人,其特征在于:所述第一机械臂(11)、第二机械臂(12)以及第三机械臂(13)的一侧均传动连接有驱动电机(17),该所述驱动电机(17)的控制端和机器人上的总控制端进行电性连接。
6.根据权利要求1所述的四轴立柱摆臂式机器人,其特征在于:所述安装座(3)的一侧还设置有斜坡,且该斜坡的一侧连通于槽体内部。
技术总结
本技术涉及机器人技术领域,具体为四轴立柱摆臂式机器人,包括底座,所述底座的顶部固定安装有安装座,所述安装座的顶部开设有一个槽体,在该所述槽体内部的左右两侧均开设有滑动轨道,所述槽体的内部下方开设有轮槽,所述轮槽的内部连接有小型滚轮,在所述小型滚轮的顶部固定安装有机器人座体,所述机器人座体的左右两侧均设置有滑动块,所述机器人座体的内部连接有转动轴体,所述转动轴体的顶部连接有支撑立柱,在所述机器人本体上还设置有液压杆,利用机器人座体下方的小型滚轮在地面进行滚动,然后从一侧的斜板送入到安装座内部的槽体内,最后再通过固定螺栓进行锁紧固定,进而方便对机器人整体进行固定安装。
技术研发人员:林鹏
受保护的技术使用者:郑州中启科技有限公司
技术研发日:20230904
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!