一种危险弹药智能识别系统的制作方法
本技术涉及一种机器人智能识别系统,尤其是一种对安全数据缺失的危险弹药进行智能识别的系统。
背景技术:
1、战争或演习过程遗留下来的弹药由于年代久远,加之这些弹药经常会埋在土中,致使弹药锈蚀后表面缺少可以辨识的标志,不能通过肉眼直接确定弹药的种类、生产年代以及是否具有杀伤力等重要的安全数据,给处置这类危险弹药工作带来较大的安全风险。为了获得这类危险弹药的详细信息,需要借助x射线成像手段获得弹药内部的图像,进而通过对图像的分析确定弹药的种类、规格以及引信的状态等信息,为处置这类危险弹药提供决策参考。采用前述方法对危险弹药识别过程中主要存在以下两方面问题:一是对危险弹药识别前,由于缺少相关信息而无法评估弹药的危险程度,现场人员近距离对弹药进行x射线成像操作存在较大的风险;二是在对弹药的x射线图像进行识别比对过程需要检索大量数据进行对比分析,人工检索工作量大,速度慢,不利于及时快速处置危险弹药,排除危险。
技术实现思路
1、实用新型要解决的技术问题是:提供一种危险弹药智能识别系统,该危险弹药智能识别系统可以现场采集危险弹药的x射线图像、并对危险弹药进行快速识别,识别过程无需人员近距离操作,安全性好,准确率高。
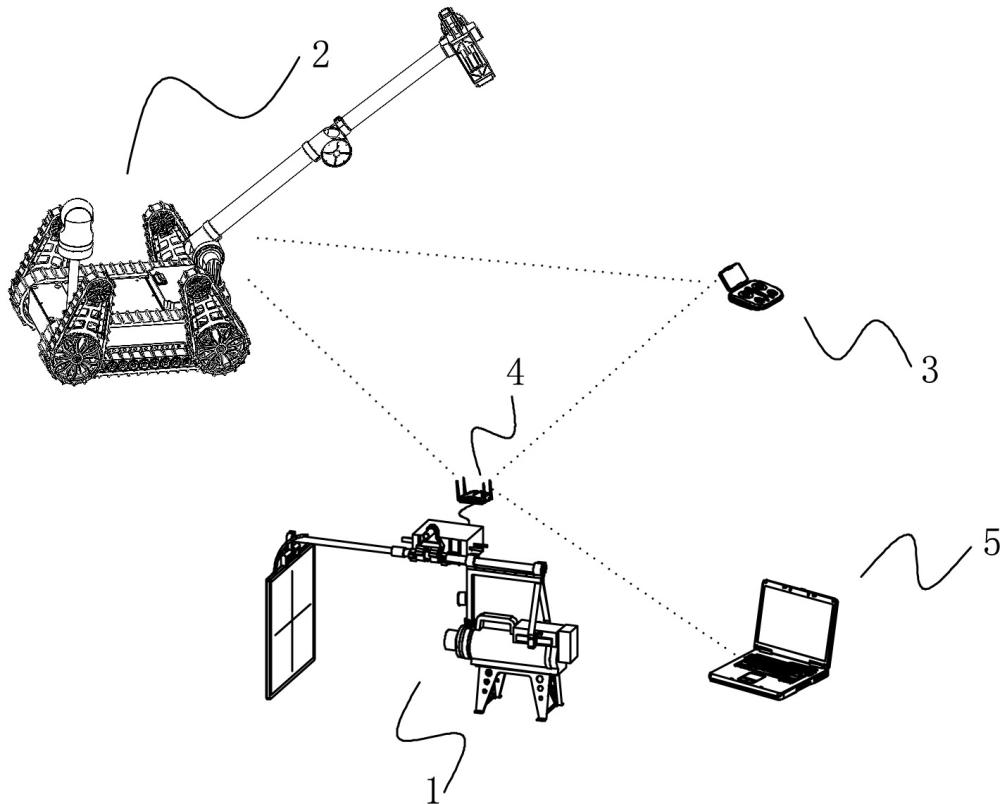
2、解决技术问题所采取的技术方案:一种危险弹药智能识别系统,包括x射线成像单元、远程控制单元、投送单元、数据传输单元和模型推理计算单元,
3、所述x射线成像单元包括x射线发生器、成像板、图像采集控制器,用于获取危险弹药的x射线图像;
4、所述投送单元为具有机械手臂的自行走防爆机器人,用于将x射线成像单元运送至危险弹药现场,并将危险弹药置于成像位置;
5、所述控制单元包括遥控器和监视器,用于远程操控投送单元和成像单元工作;
6、所述数据传输单元包括无线路由器,用于在远程控制单元与x射线成像单元、模型推理计算单元之间建立通信网络;
7、所述模型推理计算单元包括安装有数据库和图像处理软件的计算机,用于接收x射线成像单元采集到的x射线图像,并利用数据库中训练好的弹药模型对x射线图像进行推理计算,对危险弹药进行识别,给出该规格弹药的标准数据,判断出该危险弹药的安全状态。
8、作为本实用新型的进一步改进方案:所述x射线成像单元为可以由防爆机器人的机械手臂抓握运送的一体式x射线成像单元,所述一体式x射线成像单元包括一根水平安装梁,在水平安装梁的中部装有与水平安装梁垂直、可以由机械手抓握的水平吊轴,水平安装梁的一端与便携式x射线发生器连接、另一端与成像板连接,在水平安装梁上还装有外部设备盒,所述图像采集控制器、无线路由器安装在外部设备盒内,在外部设备盒内还装有给成像板、无线路由器及图像采集控制器供电的电源。
9、作为本实用新型的进一步改进方案:所述自行走防爆机器人的机械手为具有6自由度机械手。
10、有益效果:本实用新型的危险弹药智能识别系统,由于采用了所述危险弹药智能识别系统包括x射线成像单元、远程控制单元、投送单元、数据传输单元和模型推理计算单元的技术方案,识别过程中,工作人员远程操纵自行走防爆机器人将x射线成像单元运至危险弹药现场,使危险弹药置于最佳x射线成像位置,数据传输单元将采集到的危险弹药x射线图像传输给模型推理计算单元,模型推理计算单元将x射线图像与数据库中的模型进行运算推理,从而识别出弹药的规格型号、引信结构,并评估出该危险弹药安全状态,为该危险弹药的处置提供决策参考,识别过程中工作人员无需近身操作,安全性好,且识别速度快、准确率高。由于采用了所述x射线成像单元为可以由防爆机器人的机械手臂抓握运送的一体式x射线成像单元,所述一体式x射线成像单元包括一根水平安装梁,在水平安装梁的中部装有与水平安装梁垂直、可以由机械手抓握的水平吊轴,水平安装梁的一端与便携式x射线发生器连接、另一端与成像板连接,在水平安装梁上还装有外部设备盒,所述图像采集控制器、无线路由器安装在外部设备盒内,在外部设备盒内还装有给成像板、无线路由器及图像采集控制器供电的电源的技术特征,使得作业过程中,自行走防爆机器人的机械手臂可以方便地将x射线成像单元整体抓握、迅速地投放到危险弹药现场,使得识别作业操作更简单,作业速度更快。由于采用了所述自行走防爆机器人的机械手臂为具有6自由度机械手臂的技术特征,使得识别过程中机械手臂可以方便地调整x射线成像单元与危险弹药的相对位置,从而获得最佳的x射线成像,进一步提高了识别速度和准确率。
技术特征:
1.一种危险弹药智能识别系统,包括x射线成像单元、远程控制单元、投送单元、数据传输单元和模型推理计算单元,其特征是:
2.根据权利要求1所述的危险弹药智能识别系统,其特征是:所述x射线成像单元为可以由防爆机器人的机械手臂抓握运送的一体式x射线成像单元,所述一体式x射线成像单元包括一根水平安装梁,在水平安装梁的中部装有与水平安装梁垂直、可以由机械手抓握的水平吊轴,水平安装梁的一端与便携式x射线发生器连接、另一端与成像板连接,在水平安装梁上还装有外部设备盒,所述图像采集控制器、无线路由器安装在外部设备盒内,在外部设备盒内还装有给成像板、无线路由器及图像采集控制器供电的电源。
3.根据权利要求2所述的危险弹药智能识别系统,其特征是:所述自行走防爆机器人的机械手为具有6自由度机械手。
技术总结
本技术涉及机器人智能识别技术领域,具体公开了一种危险弹药智能识别系统,包括X射线成像单元、远程控制单元、投送单元、数据传输单元和模型推理计算单元,所述X射线成像单元包括X射线发生器、成像板、图像采集控制器,所述投送单元为具有机械手臂的自行走防爆机器人,所述控制单元包括遥控器和监视器,所述数据传输单元包括无线路由器,所述模型推理计算单元包括安装有数据库和图像处理软件的计算机,该危险弹药智能识别系统可以现场采集危险弹药的X射线图像、并对危险弹药进行快速识别,识别过程无需人员近距离操作,安全性好,准确率高。
技术研发人员:胡秀宇,兴隆,姜照君,金兆东,张力元
受保护的技术使用者:沈阳吕尚科技有限公司
技术研发日:20230905
技术公布日:2024/7/11
- 还没有人留言评论。精彩留言会获得点赞!