一种新型机械臂结构的制作方法
本技术涉及机械臂,具体为一种新型机械臂结构。
背景技术:
1、现有专利申请号为202021950211.9,公开号为cn213616691u的中国专利,一种新型六轴机械臂结构,包括底座,所述底座的顶部活动设置有旋转座,旋转座的上端铰接有第一活动臂,第一活动臂的上端铰接有第二活动臂,第二活动臂上活动设置有横向延伸的旋转臂,所述旋转臂的外端铰接有摆动头。本实用新型公开一种新型六轴机械臂结构既能确保六轴机械臂的正常运作,又能有效降低生产制造成本以及后期的维修成本;
2、结合上述方案,针对机械臂的使用过程中,存在以下问题,现有机械臂结构复杂,操作繁琐,不够简便,大大增加了投入成本,以及后续维护成本,造成实用性不高,不易维护。
3、因此,基于上述技术问题,本领域的技术人员有必要研发一种新型机械臂结构。
技术实现思路
1、本实用新型目的是提供一种新型机械臂结构,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
3、一种新型机械臂结构技术方案,包括底座,所述底座上设置有旋转座,所述旋转座上设置有一级臂,所述一级臂相邻一侧设置有二级臂,所述一级臂、二级臂上均设置有连接臂组件,所述连接臂组件包括动力电机,所述动力电机输出端设置有主链轮,所述主链轮相对一侧设置有转动座,所述转动座上通过转轴设置有副链轮,所述主链轮与副链轮之间设置有链条。
4、作为一种优选的技术方案,所述主链轮、副链轮外设置有保护外壳,两个所述保护外壳分别与一级臂、二级臂相连。
5、作为一种优选的技术方案,位于所述一级臂上的转动座与二级臂相连,位于二级臂上的转动座端面设置有端部电机,所述端部电机输出端设置有夹具头。
6、作为一种优选的技术方案,所述一级臂与旋转座之间设置有翻转电机,所述翻转电机与一级臂相连。
7、作为一种优选的技术方案,所述旋转座底部设置有旋转柱,所述旋转柱底面设置有旋转组件,所述旋转组件包括设置在底座上的底座电机,所述底座电机输出端设置有主带轮,所述主带轮相对一侧设置有旋转带轮,所述旋转带轮与旋转柱相连,所述旋转带轮与主带轮之间设置有皮带。
8、与现有技术相比,本实用新型的有益效果是:
9、本实用新型为一种新型机械臂结构,设置的连接臂组件、旋转组件以及翻转电机,启动底座电机,利用带传动,驱动旋转座转动,实现水平方向360°转动,翻转电机驱动一级臂翻转,实现竖直方向180°转动,而动力电机驱动主链轮转动,利用链条传动,即可实现一级臂、二级臂的多交底转动,本方案结构新颖,易于制取,同时方便维护,成本较低,但能够实现多角度的调整,实用性较高。
技术特征:
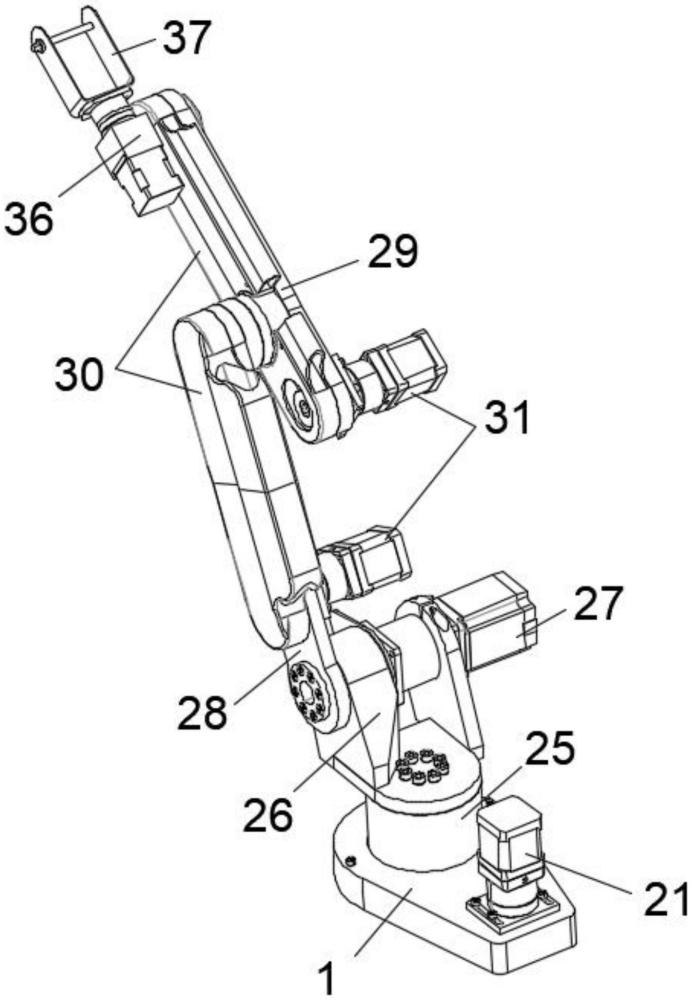
1.一种新型机械臂结构,其特征在于,包括底座(1),所述底座(1)上设有旋转座(26),所述旋转座(26)上设有一级臂(28),所述一级臂(28)相邻一侧设有二级臂(29),所述一级臂(28)、二级臂(29)上均设有连接臂组件,所述连接臂组件包括动力电机(31),所述动力电机(31)输出端设有主链轮(32),所述主链轮(32)相对一侧设有转动座(33),所述转动座(33)上通过转轴设有副链轮(34),所述主链轮(32)与副链轮(34)之间设有链条(35)。
2.根据权利要求1所述的一种新型机械臂结构,其特征在于:所述主链轮(32)、副链轮(34)外设有保护外壳(30),两个所述保护外壳(30)分别与一级臂(28)、二级臂(29)相连。
3.根据权利要求1所述的一种新型机械臂结构,其特征在于:位于所述一级臂(28)上的转动座(33)与二级臂(29)相连,位于二级臂(29)上的转动座(33)端面设有端部电机(36),所述端部电机(36)输出端设有夹具头(37)。
4.根据权利要求1所述的一种新型机械臂结构,其特征在于:所述一级臂(28)与旋转座(26)之间设有翻转电机(27),所述翻转电机(27)与一级臂(28)相连。
5.根据权利要求1所述的一种新型机械臂结构,其特征在于:所述旋转座(26)底部设有旋转柱(25),所述旋转柱(25)底面设有旋转组件,所述旋转组件包括设置在底座(1)上的底座电机(21),所述底座电机(21)输出端设有主带轮(22),所述主带轮(22)相对一侧设有旋转带轮(23),所述旋转带轮(23)与旋转柱(25)相连,所述旋转带轮(23)与主带轮(22)之间设有皮带(24)。
技术总结
本技术涉及机械臂技术领域,公开了一种新型机械臂结构,包括底座,底座上设置有旋转座,旋转座上设置有一级臂,一级臂相邻一侧设置有二级臂,一级臂、二级臂上均设置有连接臂组件,连接臂组件包括动力电机,动力电机输出端设置有主链轮,主链轮相对一侧设置有转动座,转动座上通过转轴设置有副链轮,主链轮与副链轮之间设置有链条。启动底座电机,利用带传动,驱动旋转座转动,实现水平方向360°转动,翻转电机驱动一级臂翻转,实现竖直方向180°转动,而动力电机驱动主链轮转动,利用链条传动,即可实现一级臂、二级臂的多交底转动,本方案结构新颖,易于制取,同时方便维护,成本较低,但能够实现多角度的调整,实用性较高。
技术研发人员:王军,张艳彪,高骏鹏
受保护的技术使用者:青岛普菲特智能科技有限公司
技术研发日:20230911
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!