一种机器人手臂的制作方法
本技术属于机器人,特别涉及一种机器人手臂。
背景技术:
1、机器人手臂是一种机械装置,通常由多个关节和执行器组成,用于模拟人类手臂的运动和操作,如果机器人手臂不设置可自由调节方向的机构,将会出现以下问题:
2、限制灵活性:机器人手臂的运动受到限制,无法自由地调整方向。这意味着机器人手臂无法适应不同的工作场景和任务需求。如果无法调节方向,机器人手臂将无法完成这些任务。
3、难以适应复杂环境:现实世界中的环境通常是复杂多变的,机器人手臂需要根据环境的变化来调整自身的方向。如果机器人手臂无法自由调节方向,它将无法适应不同的工作环境和工件位置,从而无法完成任务。
4、无法实现协作:在某些应用场景中,机器人手臂需要与其他机器人或人类进行协作。如果机器人手臂无法自由调节方向,它将无法与其他机器人或人类协调动作,导致协作效率低下或无法完成协作任务。
5、综上,如果机器人手臂不设置可自由调节方向的机构,将会导致灵活性受限、适应性差、协作困难等问题。因此,我们希望研发一种机器人手臂,用于解决以上问题。
技术实现思路
1、针对现有技术存在的不足,本实用新型目的是提供一种机器人手臂,解决上述背景技术中提出的问题。
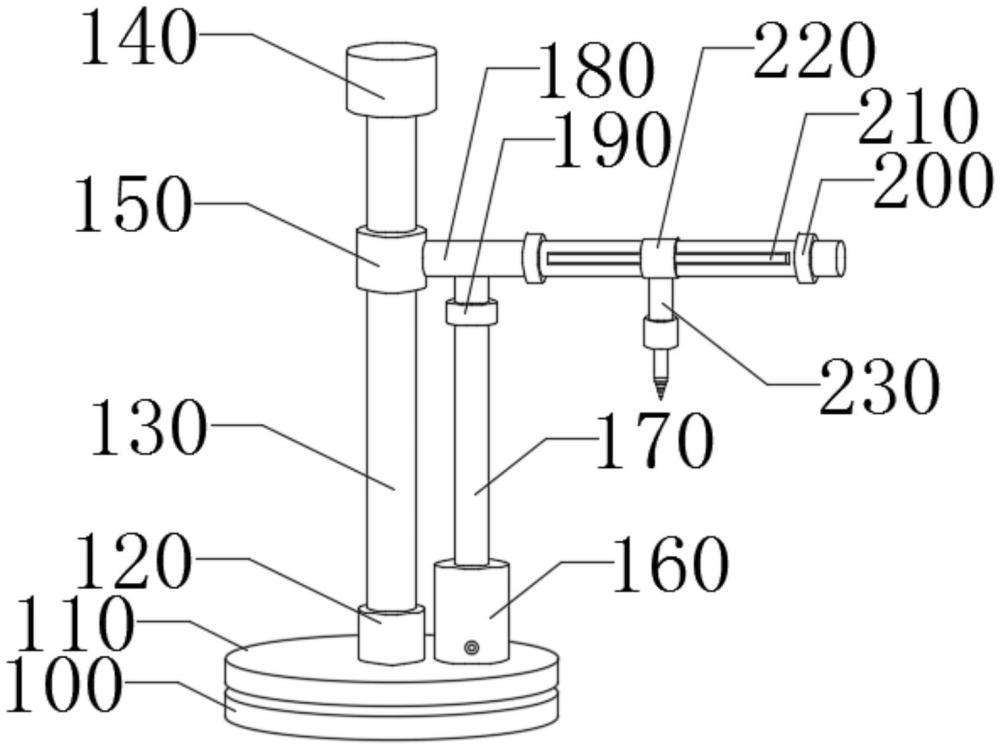
2、本实用新型通过以下的技术方案实现:一种机器人手臂,包括:底盘、支撑杆和横杆,底盘上方设有转盘,底盘与转盘的半径长度相同,转盘顶部中央处安装有固定筒,固定筒上方设有支撑杆;
3、支撑杆顶部安装有限位块一,支撑杆杆身外侧套接有升降套筒,升降套筒右侧连接固定有横杆,横杆左侧下方连接固定有对接杆,对接杆底部向上凹陷形成一组对接槽;
4、对接杆正下方设有一组对接头,对接头下方连接固定有一组升降杆,升降杆下方设有一组升降箱,升降箱底部与转盘顶部右侧固定,升降箱内部安装有电动推杆。
5、作为一优选的实施方式,升降箱正面下方开设有一组导线孔,电动推杆型号为63-10-200-750w折返式伺服电动推缸,电动推杆通过导线与外部电源连接。
6、作为一优选的实施方式,对接头的半径长度和厚度小于对接槽的半径长度和深度,对接头底部与升降杆顶部焊接固定,在实际使用时,首先将升降箱内部的电动推杆接通外部电源,启动电动推杆,电动推杆向上移动带动升降杆向上运动,升降杆顶部的对接头处于对接槽内部,从而带动对接杆向上移动,对接杆向上推动横杆,使升降套筒沿着支撑杆向上移动,从而使横杆向上移动。
7、作为一优选的实施方式,底盘上表面远离底盘圆心的环形区域内设有一组环形槽二,环形槽二内部设有若干组万向球,底盘上表面中央处开设有一组轴槽。
8、作为一优选的实施方式,转盘底部远离转盘圆形的环形区域内设有一组环形槽一,环形槽一与环形槽二的半径长度相同,转盘底部中央处焊接有一组转轴,在实际使用时,握住支撑杆向后旋转,支撑杆底部带动固定筒具有向后旋转趋势,从而带动转盘在底盘上方向后转动,向后转动过程中,转轴在轴槽内部向后旋转,同时若干组万向球在环形槽一与环形槽二之间滚动,从而保证了转盘在底盘上方转动的稳定性,最终效果是机器人手臂更加灵活,可适应复杂的工作环境,同时能够更好的实现人机协作,提高工作效率。
9、作为一优选的实施方式,横杆右侧设有两组相同的限位块二,两组限位块二之间的横杆杆身前后面分别开设有一组相同的滑槽。
10、作为一优选的实施方式,两组限位块二之间的横杆杆身外侧套接有一组滑动套筒,滑动套筒内部前后面上分别焊接有一组相同的滑条,两组滑条处于两组滑槽内部,在实际使用时,握住焊枪向左移动,两组滑条在两组滑槽内部向左移动,从而使滑动套筒沿着横杆向左平稳移动,向右移动同理,两组限位块二起到限制滑动套筒位置的作用,防止滑动套筒过度移动从而从横杆外部脱离。
11、作为一优选的实施方式,滑动套筒下方焊接有一组焊枪,焊枪型号为hc-cs2000e-qc超声波点焊机。
12、采用了上述技术方案后,本实用新型的有益效果是:通过设置升降箱、升降杆、对接杆、横杆以及升降套筒,可通过升降箱内部的电动推杆带动升降杆上下移动,从而带动升降套筒向上下移动,继而带动横杆向上移动,最终实现焊枪的上下移动,通过设置滑动套筒,可通过滑条在滑槽内部左右滑动,从而使焊头在横杆下方左右移动,通过设置底盘和转盘,可通过转轴在轴槽内部转动以及多组万向球的转动,从而实现机器人手臂的360度转动,继而使机器人手臂具有灵活性,能够适应复杂的工作环境,能够实现人机协作。
技术特征:
1.一种机器人手臂,包括:底盘(100)、支撑杆(130)和横杆(180),其特征在于:所述底盘(100)上方设有转盘(110),所述底盘(100)与转盘(110)的半径长度相同,所述转盘(110)顶部中央处安装有固定筒(120),所述固定筒(120)上方设有支撑杆(130);
2.如权利要求1所述的一种机器人手臂,其特征在于:所述升降箱(160)正面下方开设有一组导线孔,所述电动推杆型号为63-10-200-750w折返式伺服电动推缸,所述电动推杆通过导线与外部电源连接。
3.如权利要求1所述的一种机器人手臂,其特征在于:所述对接头(250)的半径长度和厚度小于对接槽(260)的半径长度和深度,所述对接头(250)底部与升降杆(170)顶部焊接固定。
4.如权利要求1所述的一种机器人手臂,其特征在于:所述底盘(100)上表面远离底盘(100)圆心的环形区域内设有一组环形槽二(280),所述环形槽二(280)内部设有若干组万向球,所述底盘(100)上表面中央处开设有一组轴槽(300)。
5.如权利要求1所述的一种机器人手臂,其特征在于:所述转盘(110)底部远离转盘(110)圆形的环形区域内设有一组环形槽一(270),所述环形槽一(270)与环形槽二(280)的半径长度相同,所述转盘(110)底部中央处焊接有一组转轴(290)。
6.如权利要求1所述的一种机器人手臂,其特征在于:所述横杆(180)右侧设有两组相同的限位块二(200),两组所述限位块二(200)之间的横杆(180)杆身前后面分别开设有一组相同的滑槽(210)。
7.如权利要求6所述的一种机器人手臂,其特征在于:两组所述限位块二(200)之间的横杆(180)杆身外侧套接有一组滑动套筒(220),所述滑动套筒(220)内部前后面上分别焊接有一组相同的滑条(240),两组所述滑条(240)处于两组滑槽(210)内部。
8.如权利要求7所述的一种机器人手臂,其特征在于:所述滑动套筒(220)下方焊接有一组焊枪(230),所述焊枪(230)型号为hc-cs2000e-qc超声波点焊机。
技术总结
本技术提供一种机器人手臂,包括:底盘、支撑杆和横杆,底盘上方设有转盘,转盘顶部中央处安装有固定筒,固定筒上方设有支撑杆,与现有技术相比,本技术具有如下的有益效果:通过设置升降箱、升降杆、对接杆、横杆以及升降套筒,可通过升降箱内部的电动推杆带动升降杆上下移动,从而带动升降套筒向上下移动,继而带动横杆向上移动,最终实现焊枪的上下移动,通过设置滑动套筒,可通过滑条在滑槽内部左右滑动,从而使焊头在横杆下方左右移动,通过设置底盘和转盘,可通过转轴在轴槽内部转动以及多组万向球的转动,从而实现机器人手臂的360度转动,继而使机器人手臂具有灵活性,能够适应复杂的工作环境,能够实现人机协作。
技术研发人员:罗邦敏
受保护的技术使用者:一把手(浙江)自动化技术股份有限公司
技术研发日:20230913
技术公布日:2024/7/29
- 还没有人留言评论。精彩留言会获得点赞!