一种机械机电控制旋转臂机械手
本技术属于机械手,具体涉及一种机械机电控制旋转臂机械手。
背景技术:
1、机械手,指能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的操作装置,能够代替人进行繁重劳动以实现生产的机械化和自动化,广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
2、在公开号为cn215589165u的中国专利中,公开了一种机械机电控制旋转臂机械手,本实用新型通过设计第一电机的作用,可带动转动座转动,从而达到带动固定板转动的效果,使得机械手可进行旋转调节,适用性更高,通过设计气缸的作用,可带动固定板上下移动,使得机械手的高度可进行调节,进一步提高了机械手的适用性。
3、上述对比专利中机械手的第二夹套不能移动,只能通过旋转来转移被夹持的物品,使得这种机械手的使用受到限制,同时,由于这种机械手的第一夹套和第二夹套不能转动,使得这种机械手夹持细长的物体时必须将物体放倒才能夹持。
技术实现思路
1、本实用新型的目的在于提供一种机械机电控制旋转臂机械手,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
3、一种机械机电控制旋转臂机械手,包括:
4、升降机构,所述升降机构固定安装在底座的上表面;
5、旋转机构一,所述旋转机构一通过安装板固定安装在升降机构的驱动端;
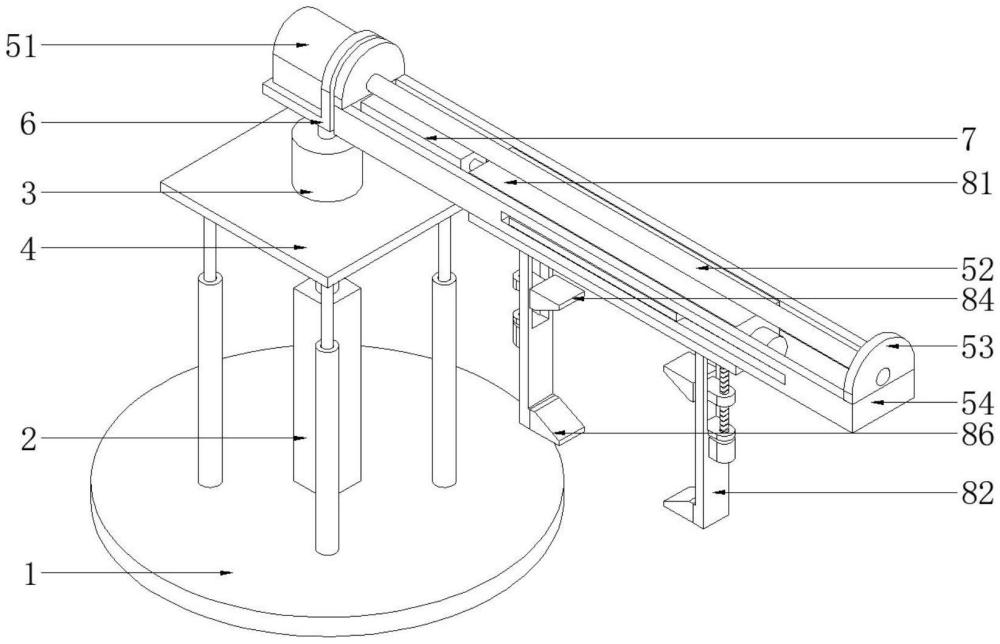
6、旋转机构二,所述旋转机构二包括驱动电机、驱动轴、连接板和安装框,所述驱动电机固定安装在l型板的上表面,所述驱动轴与驱动电机的驱动端相连,且其通过连接板与安装框的固定连接;
7、推动机构,所述推动机构安装在安装框的一侧内壁;
8、夹持机构,所述夹持机构包括安装套、滑板、同步移动部件、第一夹板、驱动部件和第二夹板,所述安装套沿安装框的长度方向与安装框滑动套接,且其与推动机构的驱动端固定连接,两个所述滑板对称滑动在安装套的内侧,所述同步移动部件用于控制两个滑板反向移动,所述第一夹板滑动安装在滑板的侧面,所述驱动部件用于控制第一夹板直线移动,所述第二夹板固定在滑板的下端。
9、优选的,所述升降机构和推动机构均为液压油缸,所述旋转机构一和驱动电机均为伺服电机。
10、优选的,所述驱动轴与l型板的侧面转动连接,两个所述连接板分别固定在驱动轴的两端,且其分别与安装框的两端固定连接。
11、优选的,所述同步移动部件包括双向丝杆和电机一,所述双向丝杆的两端分别与安装套的两端转动连接,且其两侧旋向相反的螺纹分别与两个滑板螺纹连接,所述电机一固定安装在安装套的一侧外壁,且其驱动端与双向丝杆固定连接。
12、优选的,所述驱动部件包括通槽、轴座、螺纹杆、滑块和电机二,所述通槽开设在滑板的侧面,两个所述轴座固定安装在滑板一侧面的上下两侧,所述螺纹杆的两端分别与两个轴座转动连接,所述滑块滑动安装在通槽的内侧并与螺纹杆螺纹连接,且其另一端与第一夹板固定连接。
13、优选的,所述底座和安装板之间固定安装有呈矩形阵列分布的伸缩套筒。
14、与现有技术相比,本实用新型的有益效果是:
15、(1)本实用新型通过设置旋转机构一和旋转机构二,使得夹持机构不仅能够旋转转移物品,还能够旋转改变对物品的夹持方向,无需将细长的物体放倒就能实现夹持,增加机械手的夹持方式,使得机械手使用起来更加方便。
16、(2)本实用新型通过设置推动机构,能够控制夹持机构直线移动,增加机械手转移物品的方式,能够直线移动转移物品。
17、(3)本实用新型通过设置第一夹板和第二夹板,四个夹板能够从四个方向对物品进行夹持,在夹持机构从侧面夹持物品时能够防止物品掉落,同时,通过驱动部件的设置,便于夹持大小不同的物品。
技术特征:
1.一种机械机电控制旋转臂机械手,其特征在于,包括:
2.根据权利要求1所述的一种机械机电控制旋转臂机械手,其特征在于:所述升降机构(2)和推动机构(7)均为液压油缸,所述旋转机构一(3)和驱动电机(51)均为伺服电机。
3.根据权利要求1所述的一种机械机电控制旋转臂机械手,其特征在于:所述驱动轴(52)与l型板(6)的侧面转动连接,两个所述连接板(53)分别固定在驱动轴(52)的两端,且其分别与安装框(54)的两端固定连接。
4.根据权利要求1所述的一种机械机电控制旋转臂机械手,其特征在于:所述同步移动部件(83)包括双向丝杆(831)和电机一(832),所述双向丝杆(831)的两端分别与安装套(81)的两端转动连接,且其两侧旋向相反的螺纹分别与两个滑板(82)螺纹连接,所述电机一(832)固定安装在安装套(81)的一侧外壁,且其驱动端与双向丝杆(831)固定连接。
5.根据权利要求1所述的一种机械机电控制旋转臂机械手,其特征在于:所述驱动部件(85)包括通槽(851)、轴座(852)、螺纹杆(853)、滑块(854)和电机二(855),所述通槽(851)开设在滑板(82)的侧面,两个所述轴座(852)固定安装在滑板(82)一侧面的上下两侧,所述螺纹杆(853)的两端分别与两个轴座(852)转动连接,所述滑块(854)滑动安装在通槽(851)的内侧并与螺纹杆(853)螺纹连接,且其另一端与第一夹板(84)固定连接。
6.根据权利要求1所述的一种机械机电控制旋转臂机械手,其特征在于:所述底座(1)和安装板(4)之间固定安装有呈矩形阵列分布的伸缩套筒(9)。
技术总结
本技术涉及机械手技术领域,具体公开了一种机械机电控制旋转臂机械手,包括:升降机构,所述升降机构固定安装在底座的上表面;旋转机构一,所述旋转机构一通过安装板固定安装在升降机构的驱动端;旋转机构二,所述旋转机构二包括驱动电机、驱动轴、连接板和安装框,所述驱动电机固定安装在L型板的上表面;本技术通过设置旋转机构一和旋转机构二,使得夹持机构不仅能够旋转转移物品,还能够旋转改变对物品的夹持方向,无需将细长的物体放倒就能实现夹持,增加机械手的夹持方式,使得机械手使用起来更加方便,通过设置推动机构,能够控制夹持机构直线移动,增加机械手转移物品的方式,能够直线移动转移物品。
技术研发人员:邓耀
受保护的技术使用者:郴州职业技术学院
技术研发日:20230914
技术公布日:2024/5/19
- 还没有人留言评论。精彩留言会获得点赞!