气门杆安装夹爪的制作方法
本技术涉及车间设备,具体地涉及一种气门杆安装夹爪。
背景技术:
1、发动机气门是发动机中重要的零件,气门杆又是发动机气门的一部分。目前,在安装发动机的气门时,通常采用真空吸盘式或三爪定心式夹爪拾取气门杆。其中,真空吸盘式夹爪主要依靠吸取进排气门杆的铸造端面来拾取气门杆,受气源压力影响较大,若气源压力不稳定可靠,易出现气门杆吸附失败、气门杆吸附歪斜、被吸附气门杆转运过程中掉落磕碰等情况,导致气门自动装配失败;三爪定心夹爪主要依靠夹取进排气门杆铸造端面裙部来拾取气门杆,其受气门杆铸造面端面跳动、三爪夹爪加工质量影响较大,若气门杆铸造端面跳动较大或三爪定心能力较差,气门杆易出现装配倾斜,导致气门杆在装配过程种出现磕碰划伤,影响装配质量。
2、因此,亟需针对传统夹爪夹取气门杆易受气源压力以及夹取位置的影响,无法稳定夹取气门杆,导致气门杆在装配过程中倾斜,降低装配率的问题,提出相应的解决方案。
技术实现思路
1、本实用新型的目的是为了克服现有技术存在的传统夹爪夹取气门杆易受气源压力以及夹取位置的影响,无法稳定夹取气门杆,导致气门杆在装配过程中倾斜,降低装配率的问题。
2、为了实现上述目的,本实用新型提供一种气门杆安装夹爪,包括支撑架、安装于所述支撑架一侧的夹持部和与所述夹持部连接的驱动部,所述夹持部上形成有用于夹持气门杆的杆体的夹持区域,所述驱动部设置为能够驱动所述夹持部向所述支撑架的另一侧方向移动,以通过所述夹持区域与所述支撑架配合而夹紧所述气门杆的杆体。
3、在一些实施例中,所述驱动部包括推动所述夹持部朝向所述气门杆的杆体的方向移动的推板以及安装于所述推板背离所述气门杆一侧的气缸。
4、在一些实施例中,所述夹持部包括相互固定连接的第一压板和第二压板,所述第一压板朝向所述气门杆的一侧形成有与所述气门杆的杆体相适配的夹持凹槽,所述第二夹板背离所述第一压板的一侧连接有连接组件,所述连接组件连接至所述推板。
5、在一些实施例中,所述第一压板为柔性材质。
6、在一些实施例中,所述连接组件包括多个压缩弹簧和多个螺栓,所述压缩弹簧的两端分别抵接至所述第二压板与所述推板,所述螺栓连接于所述第二压板的背离所述第一压板的一侧并贯穿所述推板,所述螺栓的远离所述第二压板的端部螺接有锁紧螺母。
7、在一些实施例中,所述螺栓垂直连接于所述第二压板,所述压缩弹簧套设于所述螺栓并在两端分别抵接至所述第二压板和所述推板。
8、在一些实施例中,所述支撑架包括用于与所述夹持部夹持配合的固定板,以及连接于所述固定板且用于承载所述气缸和所述推板的基础板,所述基础板上形成沿朝向所述固定板延伸的导向结构,所述导向结构连接至所述固定板,所述推板滑动连接于所述导向结构。
9、在一些实施例中,所述固定板的端部安装有高度挡板,所述高度挡板的一侧连接有气门传感器,以检测所述气门杆的杆体是否处于所述夹持部能够夹持的范围内。
10、在一些实施例中,所述气门杆的顶部端面的中心位置形成有定位槽,所述高度挡板的顶部的中心位置安装有与所述定位槽相适配的螺钉。
11、在一些实施例中,该气门杆安装夹爪还包括安装于所述支撑架上的连接法兰,该连接法兰电性连接至协作机器人以能够操纵所述支撑架移动。
12、通过上述技术方案,气门杆放置于支撑架的一侧,夹持部上形成有夹持区域,能够夹持气门杆的杆体,通过启动驱动部,带动夹持部朝向靠近气门杆的杆体的方向移动,使夹持部与靠近气门杆的杆体的支撑架贴合,进而夹持部上的夹持区域能够夹紧气门杆的杆体。通过推动夹持部,利用夹持区域与支撑架相互配合来夹紧气门杆的杆体的方式,与利用真空吸盘来吸附气门杆端部或利用三爪夹爪夹取气门杆铸造端面裙部的方式相比,本实用新型的气门杆安装夹爪能够稳定夹取气门杆的杆体,不易受气源压力不稳或夹取铸造端面裙部位置不稳的影响,有效防止气门杆在装配过程中倾斜,提高了装配率。
技术特征:
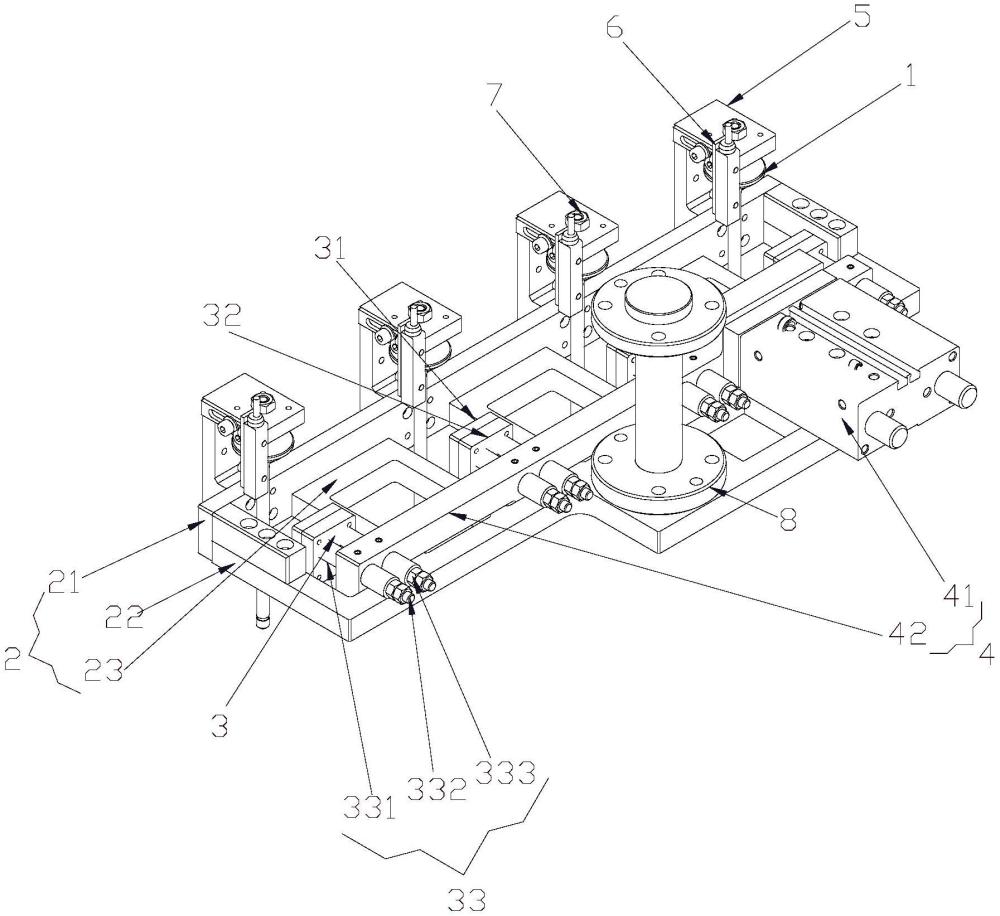
1.一种气门杆安装夹爪,其特征在于,包括支撑架(2)、安装于所述支撑架(2)一侧的夹持部(3)和与所述夹持部(3)连接的驱动部(4),所述夹持部(3)上形成有用于夹持气门杆(1)的杆体的夹持区域,所述驱动部(4)设置为能够驱动所述夹持部(3)向所述支撑架(2)的另一侧方向移动,以通过所述夹持区域与所述支撑架(2)配合而夹紧所述气门杆(1)的杆体。
2.根据权利要求1所述的气门杆安装夹爪,其特征在于,所述驱动部(4)包括推动所述夹持部(3)朝向所述气门杆(1)的杆体的方向移动的推板(42)以及安装于所述推板(42)背离所述气门杆(1)一侧的气缸(41)。
3.根据权利要求2所述的气门杆安装夹爪,其特征在于,所述夹持部(3)包括相互固定连接的第一压板(31)和第二压板(32),所述第一压板(31)朝向所述气门杆(1)的一侧形成有与所述气门杆(1)的杆体相适配的夹持凹槽,所述第二压板(32)背离所述第一压板(31)的一侧连接有连接组件(33),所述连接组件(33)连接至所述推板(42)。
4.根据权利要求3所述的气门杆安装夹爪,其特征在于,所述第一压板(31)为柔性材质。
5.根据权利要求3所述的气门杆安装夹爪,其特征在于,所述连接组件(33)包括多个压缩弹簧(331)和多个螺栓(332),所述压缩弹簧(331)的两端分别抵接至所述第二压板(32)与所述推板(42),所述螺栓(332)连接于所述第二压板(32)的背离所述第一压板(31)的一侧并贯穿所述推板(42),所述螺栓(332)的远离所述第二压板(32)的端部螺接有锁紧螺母(333)。
6.根据权利要求5所述的气门杆安装夹爪,其特征在于,所述螺栓(332)垂直连接于所述第二压板(32),所述压缩弹簧(331)套设于所述螺栓(332)并在两端分别抵接至所述第二压板(32)和所述推板(42)。
7.根据权利要求2所述的气门杆安装夹爪,其特征在于,所述支撑架(2)包括用于与所述夹持部(3)夹持配合的固定板(21),以及连接于所述固定板(21)且用于承载所述气缸(41)和所述推板(42)的基础板(22),所述基础板(22)上形成沿朝向所述固定板(21)延伸的导向结构(23),所述导向结构(23)连接至所述固定板(21),所述推板(42)滑动连接于所述导向结构(23)。
8.根据权利要求7所述的气门杆安装夹爪,其特征在于,所述固定板(21)的端部安装有高度挡板(5),所述高度挡板(5)的一侧连接有气门传感器(6),以检测所述气门杆(1)的杆体是否处于所述夹持部(3)能够夹持的范围内。
9.根据权利要求8所述的气门杆安装夹爪,其特征在于,所述气门杆(1)的顶部端面的中心位置形成有定位槽,所述高度挡板(5)的顶部的中心位置安装有与所述定位槽相适配的螺钉(7)。
10.根据权利要求1所述的气门杆安装夹爪,其特征在于,该气门杆安装夹爪还包括安装于所述支撑架(2)上的连接法兰(8),该连接法兰(8)电性连接至协作机器人以能够操纵所述支撑架(2)移动。
技术总结
本技术涉及车间设备领域,公开了一种气门杆安装夹爪,包括支撑架、安装于所述支撑架一侧的夹持部和与所述夹持部连接的驱动部,夹持部上形成有用于夹持气门杆的杆体的夹持区域,驱动部设置为能够驱动夹持部向支撑架的另一侧方向移动,以通过夹持区域与支撑架配合而夹紧气门杆的杆体。通过推动夹持部,利用夹持区域与支撑架相互配合来夹紧气门杆的杆体的方式,与利用真空吸盘来吸附气门杆端部或利用三爪夹爪夹取气门杆铸造端面裙部的方式相比,能够稳定夹取气门杆的杆体,不易受气源压力不稳或夹取铸造端面裙部位置不稳的影响,有效防止气门杆在装配过程中倾斜,提高了装配率。
技术研发人员:黄运保,张建红,左志兵
受保护的技术使用者:北京福田康明斯发动机有限公司
技术研发日:20230918
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!