一种车桥气动爪手的制作方法
本技术涉及车桥夹具,尤其涉及一种车桥气动爪手。
背景技术:
1、车桥,通过悬架和车架(或承载式车身)相连,两端安装汽车车轮的桥式结构,是汽车行驶系的主要组成部分。
2、车桥可以是整体式的,有如一个巨大的杠铃,两端通过悬架系统支撑着车身,因此整体式车桥通常与非独立悬架配合;车桥也可以是断开式的,像两把雨伞插在车身两侧,再各自通过悬架系统支撑车身,所以断开式车桥与独立悬架配用。
3、现有的在一般汽车组装生产线上,对于车桥的在各个工位上的轮转,一般是通过桁车利用柔性吊带进行对车桥的转运,但是此种方式一方面对工人的熟练程度有要求,每次起吊为了防止车桥的重心偏移,需要临时找吊点,这就大大降低了车桥的轮转效率,同时对于工人的劳动强度也较大,不方便精准转运。
4、因此亟需一种能够对车桥进行高效、精准的转运爪手。
技术实现思路
1、针对上述技术问题,本实用新型提供了一种车桥气动爪手,用于对车桥进行高效、精准的抓取和减轻工人的劳动强度。
2、本实用新型的上述技术目的是通过以下技术方案得以实现的:
3、一种车桥气动爪手,包括机架和分别设置在机架两端的夹持单元,所述机架两端的夹持单元结构相同;
4、所述夹持单元设有底板,所述底板的一端垂直设有安装立板,所述安装立板上设有驱动气缸,所述安装立板位于驱动气缸的上方平行于底板设有托板,所述托板上设有第一夹爪;
5、所述底板远离安装立板的一端垂直于安装立板固定设有导轨,所述导轨上配合设有滑块,所述滑块上设有驱动座,所述驱动气缸的伸缩端与驱动座进行连接,所述驱动座的顶部设有第二夹爪,所述第一夹爪和第二夹爪结构相同且对称布置;
6、所述第二夹爪在驱动气缸的作用下做相对于第一夹爪的相向运动;
7、所述第一夹爪和第二夹爪均设有衔接板,所述衔接板上垂直设有竖板,所述竖板上布置有多个定位柱。
8、进一步地,所述第一夹爪和第二夹爪之间设有护罩。
9、进一步地,所述驱动气缸上设有自锁装置。
10、进一步地,所述底板上垂直设有护板,所述护板搭配安装立板构成一个箱体。
11、进一步地,所述机架整体呈t型,且设有用于承载夹持单元的横梁,所述横梁的中部共面垂直设有竖梁,所述竖梁一端设有连接盘。
12、进一步地,所述竖板与衔接板之间设有肋板。
13、综上所述,本实用新型的有益技术效果为:
14、(1)利用驱动气缸控制第二夹爪沿导轨做相对于第一夹爪的相向运动,同时搭配定位柱能够将位于第一夹爪和第二夹爪之间的车桥进行夹持固定,在固定的同时利用机械手为整个机架提供动力,进而实现了对车桥高效、精准的抓取和转运,进一步的提高了转运效率和降低了劳动强度。
15、(2)利用自锁装置可以避免在车桥抓取过程中出现意外脱钩的危险,进而大大的提高了整个装置的安全性。
16、(3)利用将机架设置为t型结构,同时将连接盘设置在远离夹持单元的一端,这样能够避免机械手上的管路与夹持单元的管路发生干涉。
技术特征:
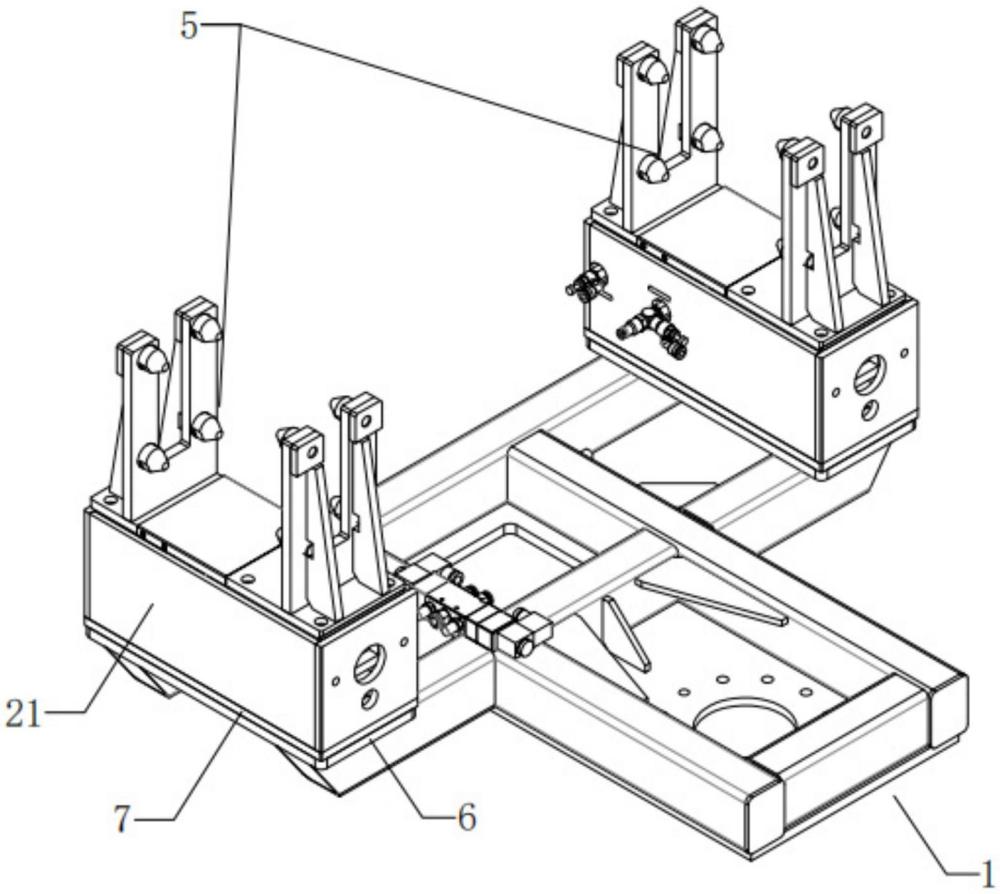
1.一种车桥气动爪手,包括机架(1)和分别设置在机架(1)两端的夹持单元(5),其特征在于:所述机架(1)两端的夹持单元(5)结构相同;
2.根据权利要求1所述的一种车桥气动爪手,其特征在于:所述第一夹爪(15)和第二夹爪(16)之间设有护罩(22)。
3.根据权利要求2所述的一种车桥气动爪手,其特征在于:所述驱动气缸(9)上设有自锁装置(11)。
4.根据权利要求3所述的一种车桥气动爪手,其特征在于:所述底板(7)上垂直设有护板(21),所述护板(21)搭配安装立板(8)构成一个箱体。
5.根据权利要求4所述的一种车桥气动爪手,其特征在于:所述机架(1)整体呈t型,且设有用于承载夹持单元(5)的横梁(2),所述横梁(2)的中部共面垂直设有竖梁(3),所述竖梁(3)一端设有连接盘(4)。
6.根据权利要求5所述的一种车桥气动爪手,其特征在于:所述竖板(18)与衔接板(17)之间设有肋板(20)。
技术总结
本技术公开了一种车桥气动爪手,涉及车桥夹具技术领域,包括机架和分别设置在机架两端的夹持单元,机架两端的夹持单元结构相同;夹持单元设有底板,底板的一端垂直设有安装立板,安装立板上设有驱动气缸,安装立板位于驱动气缸的上方平行于底板设有托板,托板上设有第一夹爪;底板远离安装立板的一端垂直于安装立板固定设有导轨,导轨上配合设有滑块,滑块上设有驱动座,驱动气缸的伸缩端与驱动座进行连接,驱动座的顶部设有第二夹爪,本技术通过机架与机械手连接,通过驱动气缸带动第二夹爪做相对于第一夹爪的相向运动,同时配合多个定位柱能够对车桥进行精准、高效的抓取,进而大大的提高了车桥轮转的效率和降低了工人的劳动劳动强度。
技术研发人员:焦淑权,方溟,郑献策
受保护的技术使用者:青岛海泰科机器人系统有限公司
技术研发日:20230921
技术公布日:2024/5/19
- 还没有人留言评论。精彩留言会获得点赞!