一种自动化复合机械手的制作方法
本技术涉及自动化复合机械手,尤其涉及一种自动化复合机械手。
背景技术:
1、在机械自动化生产盒加工过程中,通常需要用到自动化上下料机械手,上下料机械手主要实现机床制造过程的完全自动化,并采用了集成加工技术,适用于生产线的上下料、工件翻转、工件转序。
2、专利申请号为cn202123375941.8的实用新型文件,公开了一种机械加工用自动化上下料机械手,包括底座,所述底座顶部外壁转动连接有支撑组件。本实用新型通过设置的断接机构、传动筒、三棱柱和第一弹簧,可以实现需要切换夹具时,通过断接机构将动力传输中断之后将三棱柱推出,旋转转盘当选定的夹具经过传动筒时,在第一弹簧的作用下将三棱柱推入,形成新的动力连接,达到切换方便的效果。
3、上述申请文件中提出的自动化上下料机械手,在实际生产作业的过程中,由于只能在同一个高度进行旋转作业,因此无法实现在不同的高度进行前后交错上下料,降低了上下料作业的效率,且该机械手的前端缺乏对其保护的结构,在机械手转动过程中,若碰到其他设备或硬物时,容易造成机械手本体的损坏,影响使用寿命。为此,我们提出了一种自动化复合机械手,对以上缺点问题进行了改进。
技术实现思路
1、本实用新型的目的在于提供一种自动化复合机械手,以解决上述背景技术中提出的问题。
2、为了实现上述目的,本实用新型采用了如下技术方案:
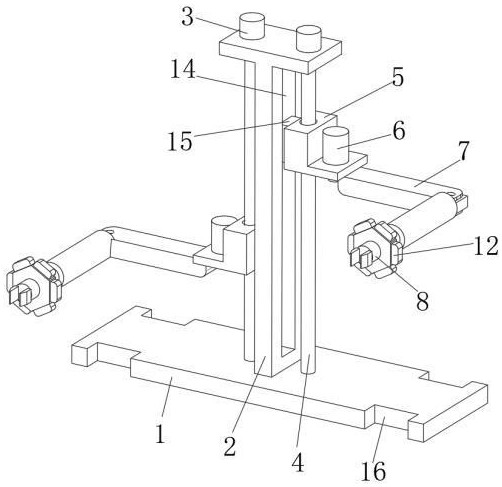
3、一种自动化复合机械手,包括底座,所述底座的上表面固定连接有呈t字形的固定机架,固定机架的上表面安装有两个位置相对应的驱动电机,驱动电机的输出端穿过固定机架的上表面,且固定连接有升降丝杆,升降丝杆的表面螺纹连接有移动座,移动座的表面固定安装有旋转电机,旋转电机的输出轴固定安装有旋转延伸臂,旋转延伸臂远离旋转电机的一端安装有机械手本体,所述机械手本体的表面设置有防护机构。
4、优选地,所述防护机构包括套设安装在机械手本体表面的安装环,安装环呈六边形结构,且安装环的内部设置有缓冲槽。
5、优选地,所述安装环的六个侧面均开设有位置相对应的导向通孔,导向通孔的内壁滑动连接有防护块,防护块的外表面呈弧形结构。
6、优选地,所述缓冲槽的内壁固定设置有若干个支撑弹簧,支撑弹簧的端部与防护块的底部固定连接。
7、优选地,所述固定机架的表面开设有限位滑槽,所述移动座的表面固定设置有限位滑块,限位滑块与限位滑槽的内壁滑动连接。
8、优选地,所述升降丝杆的底端与底座的上表面转动连接,所述底座的前后表面均开设有位置相对应的安装固定槽。
9、本实用新型与现有技术相比具有以下优点:
10、1、本实用新型通过设置两个驱动电机和升降丝杆,在驱动电机和升降丝杆的配合作用下,可以分别带动两个机械手本体进行上下移动,使两个机械手分别在不同的高度进行作业,且可以通过旋转电机分别带动两个机械手进行水平转动,从而使两个机械手同时进行不同维度的任务作业,方便两个机械手同时对不同位置的物料进行上下料操作,有助于提高机械手的工作效率。
11、2、本实用新型通过在机械手的表面设置有防护机构,利用安装环表面的若干个防护块可以对机械手的周边起到防护作用,且利用安装环内部的支撑弹簧和缓冲槽,可以对防护块受到的冲击力进行缓冲和抵消,从而对机械手起到缓冲的作用,进一步提高了对机械手的防护效果,有助于延长机械手的使用寿命。
技术特征:
1.一种自动化复合机械手,包括底座(1),其特征在于:所述底座(1)的上表面固定连接有呈t字形的固定机架(2),固定机架(2)的上表面安装有两个位置相对应的驱动电机(3),驱动电机(3)的输出端穿过固定机架(2)的上表面,且固定连接有升降丝杆(4),升降丝杆(4)的表面螺纹连接有移动座(5),移动座(5)的表面固定安装有旋转电机(6),旋转电机(6)的输出轴固定安装有旋转延伸臂(7),旋转延伸臂(7)远离旋转电机(6)的一端安装有机械手本体(8),所述机械手本体(8)的表面设置有防护机构。
2.根据权利要求1所述的一种自动化复合机械手,其特征在于:所述防护机构包括套设安装在机械手本体(8)表面的安装环(9),安装环(9)呈六边形结构,且安装环(9)的内部设置有缓冲槽(10)。
3.根据权利要求2所述的一种自动化复合机械手,其特征在于:所述安装环(9)的六个侧面均开设有位置相对应的导向通孔(11),导向通孔(11)的内壁滑动连接有防护块(12),防护块(12)的外表面呈弧形结构。
4.根据权利要求2所述的一种自动化复合机械手,其特征在于:所述缓冲槽(10)的内壁固定设置有若干个支撑弹簧(13),支撑弹簧(13)的端部与防护块(12)的底部固定连接。
5.根据权利要求1所述的一种自动化复合机械手,其特征在于:所述固定机架(2)的表面开设有限位滑槽(14),所述移动座(5)的表面固定设置有限位滑块(15),限位滑块(15)与限位滑槽(14)的内壁滑动连接。
6.根据权利要求1所述的一种自动化复合机械手,其特征在于:所述升降丝杆(4)的底端与底座(1)的上表面转动连接,所述底座(1)的前后表面均开设有位置相对应的安装固定槽(16)。
技术总结
本技术公开了一种自动化复合机械手,包括底座,所述底座的上表面固定连接有呈T字形的固定机架,固定机架的上表面安装有两个位置相对应的驱动电机,驱动电机的输出端穿过固定机架的上表面,且固定连接有升降丝杆,升降丝杆的表面螺纹连接有移动座,移动座的表面固定安装有旋转电机。本技术通过设置两个驱动电机和升降丝杆,在驱动电机和升降丝杆的配合作用下,可以分别带动两个机械手本体进行上下移动,使两个机械手分别在不同的高度进行作业,且可以通过旋转电机分别带动两个机械手进行水平转动,从而使两个机械手同时进行不同维度的任务作业,方便两个机械手同时对不同位置的物料进行进行上下料操作,有助于提高机械手的工作效率。
技术研发人员:史经斌,田超峰,马春港
受保护的技术使用者:上海协闵自动化设备有限公司
技术研发日:20231016
技术公布日:2024/5/12
- 还没有人留言评论。精彩留言会获得点赞!