一种八爪鱼真空吸盘的制作方法
:本技术涉及吸盘产品,特指一种八爪鱼真空吸盘。
背景技术
0、
背景技术:
1、专利号为zl202122529409.0公开了一种用于物料分拣的多吸盘可移动机械手,包括并联机器人,并联机器人的动平台通过iso夹具接口与执行机构搭载平台连接,执行机构搭载平台呈水平设置的平板状,执行机构搭载平台的底面设有多个沿y轴延伸的直线模组,且多个直线模组沿x轴间隔排列;直线模组包括滑块、电机以及相互平行的直线导轨和丝杆,滑块底部设有真空吸盘,真空吸盘能对目标物进行吸附,真空吸盘通过气体管路与真空发生器连接。多吸盘可移动机械手可以多吸盘共同抓取,且可根据实际识别位置信息进行移动、吸附目标,实现吸附效率最大化,解决了传统并联机器人下只配合一个真空吸盘,面对复杂多类别的物品时则易出现较大漏检率,未最大程度发挥真空吸盘实际价值。
2、但是,上述吸盘均为单吸嘴结构,仅能对一个点进行吸附定位,如需要对多点吸附定位时,通过采用多吸盘实现;同时,每个真空吸盘均通过独立气体管路与真空发生器连接,以致需要采用多管路结构,易出现管路多而凌乱的现象,不仅安装起来不方便,且不便于维修保养。
3、有鉴于此,本发明人提出以下技术方案。
技术实现思路
0、
技术实现要素:
1、本实用新型的目的在于克服现有技术的不足,提供一种八爪鱼真空吸盘。
2、为了解决上述技术问题,本实用新型采用了下述技术方案:该八爪鱼真空吸盘包括呈上凸下凹碗状的吸盘主体,该吸盘主体上端设置有用于外物安装的连接环座,该连接环座设置有总负压口,该吸盘主体下端设置有多个吸嘴,且该吸盘主体内设置有多条呈辐射状分布且尺寸长度相同的气道,该气道一端连通总负压口,该气道另一端连通所述吸嘴,所述吸盘主体设置有复数贯通内外侧面并用减轻重量的镂空孔。
3、进一步而言,上述技术方案中,所述吸盘主体中一体成型有多条呈辐射状分布并呈弯曲状的管体,该管体上表面凸出于该吸盘主体外侧面之外,该管体下表面凸显于该吸盘主体内侧面之外,且该管体具有所述的气道,该管体下端向下凸出于吸盘主体下端之外,并作为所述的吸嘴,管体上端与连接环座一体连接。
4、进一步而言,上述技术方案中,所述管体下表面还一体成型有用于增加强度的加强筋。
5、进一步而言,上述技术方案中,所述管体为圆管,所述气道的截面呈圆形。
6、进一步而言,上述技术方案中,所述镂空孔为多边形孔。
7、进一步而言,上述技术方案中,所述吸嘴下端还设置有可拆卸的吸盘件。
8、进一步而言,上述技术方案中,所述吸嘴与吸盘件之间通过螺纹连接。
9、采用上述技术方案后,本实用新型与现有技术相比较具有如下有益效果:本实用新型八爪鱼真空吸盘具有一个总负压口以及多个均与该总负压口通过气道连通的吸嘴,以致在使用时,通过一条气管连接该总负压口,通过总负压口抽真空,即可使多个吸嘴同时能够形成负压,以此能够与一个物体形成多点吸附定位,其吸附能力强,即能稳定吸附定位物体,且本实用新型采用一条气管即可实现多点吸附定位,结构极为简单,避免出现采用多管路结构而凌乱,且安装起来不方便,且维修保养不方便的稳定。另外,由于气道呈辐射状分布且尺寸长度相同,其分布均匀,且统一总负压口,保证多点式稳定大吸力的同时负载分布均匀,高负压的流量可吸取较大较重物体,令本实用新型具有更强的市场竞争力。
技术特征:
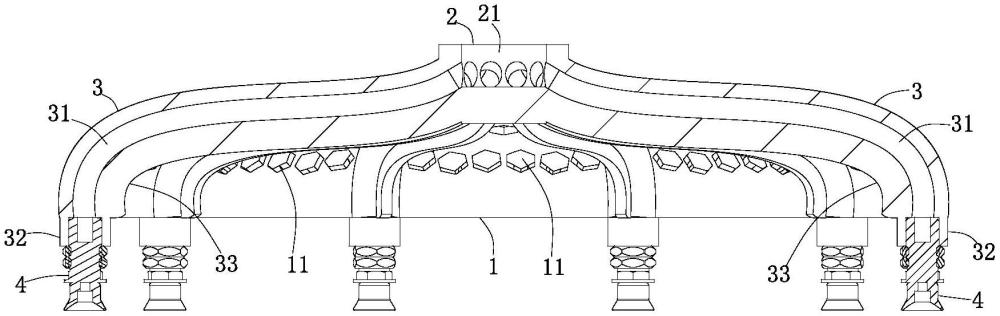
1.一种八爪鱼真空吸盘,其特征在于:其包括呈上凸下凹碗状的吸盘主体(1),该吸盘主体(1)上端设置有用于外物安装的连接环座(2),该连接环座(2)设置有总负压口(21),该吸盘主体(1)下端设置有多个吸嘴(32),且该吸盘主体(1)内设置有多条呈辐射状分布且尺寸长度相同的气道(31),该气道(31)一端连通总负压口(21),该气道(31)另一端连通所述吸嘴(32);所述吸盘主体(1)设置有复数贯通内外侧面并用减轻重量的镂空孔(11)。
2.根据权利要求1所述的一种八爪鱼真空吸盘,其特征在于:所述吸盘主体(1)中一体成型有多条呈辐射状分布并呈弯曲状的管体(3),该管体(3)上表面凸出于该吸盘主体(1)外侧面之外,该管体(3)下表面凸显于该吸盘主体(1)内侧面之外,且该管体(3)具有所述的气道(31),该管体(3)下端向下凸出于吸盘主体(1)下端之外,并作为所述的吸嘴(32),管体(3)上端与连接环座(2)一体连接。
3.根据权利要求2所述的一种八爪鱼真空吸盘,其特征在于:所述管体(3)下表面还一体成型有用于增加强度的加强筋(33)。
4.根据权利要求3所述的一种八爪鱼真空吸盘,其特征在于:所述管体(3)为圆管,所述气道(31)的截面呈圆形。
5.根据权利要求4所述的一种八爪鱼真空吸盘,其特征在于:所述镂空孔(11)为多边形孔。
6.根据权利要求4所述的一种八爪鱼真空吸盘,其特征在于:所述吸嘴(32)下端还设置有可拆卸的吸盘件(4)。
7.根据权利要求6所述的一种八爪鱼真空吸盘,其特征在于:所述吸嘴(32)与吸盘件(4)之间通过螺纹连接。
技术总结
本技术公开一种八爪鱼真空吸盘,其包括呈上凸下凹碗状的吸盘主体,该吸盘主体上端设置有用于外物安装的连接环座,该连接环座设置有总负压口,该吸盘主体下端设置有多个吸嘴,且该吸盘主体内设置有多条呈辐射状分布且尺寸长度相同的气道,该气道一端连通总负压口,该气道另一端连通所述吸嘴。本技术采用一条气管即可实现多点吸附定位,结构极为简单,避免出现采用多管路结构而凌乱,且安装起来不方便,且维修保养不方便的稳定。另外,由于气道呈辐射状分布且尺寸长度相同,其分布均匀,且统一总负压口,保证多点式稳定大吸力的同时负载分布均匀,高负压的流量可吸取较大较重物体,令本技术具有更强的市场竞争力。
技术研发人员:叶心星,叶子豪
受保护的技术使用者:东莞市星纳特智能科技有限公司
技术研发日:20231020
技术公布日:2024/10/17
- 还没有人留言评论。精彩留言会获得点赞!