一种机械转运手的制作方法
本技术属于生物组织包埋,具体涉及一种机械转运手。
背景技术:
1、现有对组织进行切片研究时,需先对组织进行包埋;现有的包埋方式是,先在包埋底座内滴入一定量的石蜡,然后人工将组织放入到包埋底座内,并手动将组织贴紧固定在包埋底座的底壁上,然后人工将包埋盒放置到包埋底座上,再滴入一定量的石蜡,将这个整体放置到冷却台上进行冷却,使得石蜡固化,从而实现了对组织的包埋。
2、在上述过程中,完全需要人工手动进行操作,对组织包埋的效果完全取决于操作人员的水平和熟练程度,在对大量组织进行包埋时,操作人员无法长时间保持高效的工作状态,使得部分组织的包埋效果并不理想,且还会出现包埋效率较低。
技术实现思路
1、有鉴于此,本实用新型提供了一种机械转运手,能够实现自动抓取包埋底座,并能够将包埋底座摆放到预定位置,无需人工移动包埋底座,方便实现对生物组织的自动化包埋。
2、本实用新型所采用的技术方案:
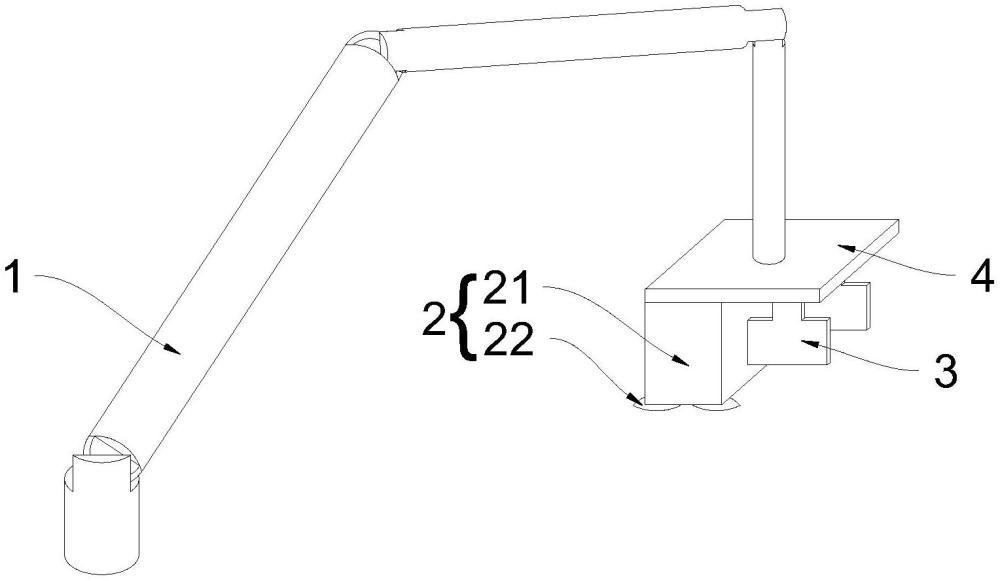
3、一种机械转运手,用于抓取包埋底座,包括机械臂和连接于所述机械臂自由端的吸盘机构;
4、所述吸盘机构包括安装头和负压吸盘,所述安装头竖直设置,所述负压吸盘安装于所述安装头的下端,所述安装头的上端转动安装于所述机械臂的自由端,以使得所述安装头能够绕着竖直的轴线转动;
5、所述负压吸盘包括橡胶盘体,所述橡胶盘体的中部设有通气口,所述通气口处设置有通气电磁阀,以打开或封闭所述通气口。
6、优选地,所述安装头为方柱体,所述负压吸盘的数量为四个,分别位于所述安装头下端的四角位置。
7、优选地,机械转运手还包括顶针机构,所述顶针机构包括顶针和伸缩机构,所述顶针竖直设置,并与所述通气口对应,所述顶针安装于所述伸缩机构,以带动所述顶针上下运动,所述顶针能够向下穿过所述通气口。
8、优选地,所述伸缩机构包括直线电机,所述直线电机的输出轴与所述顶针连接。
9、优选地,机械转运手还包括夹持机构,用于夹持包埋盒;
10、所述夹持机构与所述吸盘机构并排连接于所述机械臂的自由端。
11、优选地,机械转运手还包括支撑板,所述支撑板安装于所述机械臂的自由端,所述夹持机构和所述吸盘机构安装于所述支撑板。
12、优选地,所述夹持机构包括两个相对设置的夹持爪和动力机构,所述动力机构与两个所述夹持爪连接,以带动两个所述夹持爪相互靠近或远离。
13、优选地,所述动力机构包括双头电机,所述双头电机的两个输出轴分别连接有第一螺纹杆和第二螺纹杆,所述第一螺纹杆与所述第二螺纹杆的螺纹方向相反,所述第一螺纹杆和所述第二螺纹杆分别与一个夹持爪螺纹连接。
14、优选地,所述夹持爪包括活动块和与所述活动块连接的爪部,所述活动块上设有螺纹孔;
15、两个所述夹持爪分别为第一夹持爪和第二夹持爪,所述第一螺纹杆与所述第一夹持爪的螺纹孔连接,所述第二螺纹杆与所述第二夹持爪的螺纹孔连接。
16、本实用新型的有益效果:
17、在对生物组织进行包埋时,先将生物组织放置到包埋底座内,然后再将包埋底座转移至滴蜡头的正下方,方便承接滴蜡头滴落的液态腊,从而实现对生物组织的包埋;本实用新型的机械转运手,通过负压吸盘能够吸附住包埋底座,从而能够抓取包埋底座,并将包埋底座转移至滴蜡头的正下方,方便实现生物组织的自动包埋。
技术特征:
1.一种机械转运手,用于抓取包埋底座,其特征在于,包括机械臂和连接于所述机械臂自由端的吸盘机构;
2.根据权利要求1所述的机械转运手,其特征在于,所述安装头为方柱体,所述负压吸盘的数量为四个,分别位于所述安装头下端的四角位置。
3.根据权利要求1所述的机械转运手,其特征在于,还包括顶针机构,所述顶针机构包括顶针和伸缩机构,所述顶针竖直设置,并与所述通气口对应,所述顶针安装于所述伸缩机构,以带动所述顶针上下运动,所述顶针能够向下穿过所述通气口。
4.根据权利要求3所述的机械转运手,其特征在于,所述伸缩机构包括直线电机,所述直线电机的输出轴与所述顶针连接。
5.根据权利要求1-4任一项所述的机械转运手,其特征在于,还包括夹持机构,用于夹持包埋盒;
6.根据权利要求5所述的机械转运手,其特征在于,还包括支撑板,所述支撑板安装于所述机械臂的自由端,所述夹持机构和所述吸盘机构安装于所述支撑板。
7.根据权利要求5所述的机械转运手,其特征在于,所述夹持机构包括两个相对设置的夹持爪和动力机构,所述动力机构与两个所述夹持爪连接,以带动两个所述夹持爪相互靠近或远离。
8.根据权利要求7所述的机械转运手,其特征在于,所述动力机构包括双头电机,所述双头电机的两个输出轴分别连接有第一螺纹杆和第二螺纹杆,所述第一螺纹杆与所述第二螺纹杆的螺纹方向相反,所述第一螺纹杆和所述第二螺纹杆分别与一个夹持爪螺纹连接。
9.根据权利要求8所述的机械转运手,其特征在于,所述夹持爪包括活动块和与所述活动块连接的爪部,所述活动块上设有螺纹孔;
技术总结
本技术涉及一种机械转运手,用于抓取包埋底座,包括机械臂和连接于所述机械臂自由端的吸盘机构;所述吸盘机构包括安装头和负压吸盘,所述安装头竖直设置,所述负压吸盘安装于所述安装头的下端,所述安装头的上端转动安装于所述机械臂的自由端,以使得所述安装头能够绕着竖直的轴线转动。在对生物组织进行包埋时,先将生物组织放置到包埋底座内,然后再将包埋底座转移至滴蜡头的正下方,方便承接滴蜡头滴落的液态腊,从而实现对生物组织的包埋;本技术的机械转运手,通过负压吸盘能够吸附住包埋底座,从而能够抓取包埋底座,并将包埋底座转移至滴蜡头的正下方,方便实现生物组织的自动包埋。
技术研发人员:杨月勤,麻晓媛,杜朋飞,许建,辛力军,郭敏敏
受保护的技术使用者:北京昭衍新药研究中心股份有限公司
技术研发日:20231020
技术公布日:2024/11/18
- 还没有人留言评论。精彩留言会获得点赞!