一种防爆式翻转搬运机器人的制作方法
本技术涉及工业防爆领域,尤其涉及一种防爆式翻转搬运机器人。
背景技术:
1、在工业生产中,需要使用一种设备将填充有原料的料箱内的原料,投倒在多个料口内进入下一工艺流程,目前多使用直角坐标机器人或直线穿梭车翻转投料设备来完成此类投料的搬运和倒料工作,但这种搬运倒料方式存在设备制造成本高、料箱夹具设计制造复杂、运行空间位置占用多、运行动作繁琐的缺点,基于这些不足,现将翻转功能与现有agv搬运模式功能有效结合,组成了一种新型的倒料搬运机器人,通过这种倒料搬运方式,既能有效降低设备的生产制造成本,又能减小设备的占用空间,同时简化运动动作的繁琐,实现料箱的搬运倒料工作,但是,现有的搬运小车在做倒料时只是简单的倾倒,对方只能按照既定的方向进行倾倒,对于一些特殊的地点并不方便倒料。
2、申请号为202121526876 .1的中国专利文献公开了一种倒料搬运机器人,包括机器人本体,包括支承座、电动机、减速机、转盘支座、回转圆盘、翻转架和输送机;所述支承座固定设置在机器人本体的顶部,所述转盘支座对称固定设置在支承座上,所述减速机固定设置在支承座上,所述电动机固定设置在减速机上,所述回转圆盘转接设置在转盘支座上,翻转架固定设置在回转圆盘上;所述输送机设置在支承座上。该倒料搬运机器人无法满足在涉爆区域
3、使用的要求,因此,需要对该产品进行一系列的防爆处理。
技术实现思路
1、本实用新型提供一种防爆式翻转搬运机器人,用以解决现有的倒料搬运机器人无法在涉爆区域使用,无法移动,无法全方位避障,以及支撑料桶的运输过程打滑、翻转不到位以及越位的问题。
2、为了解决上述技术问题,本实用新型公开了如下技术方案:
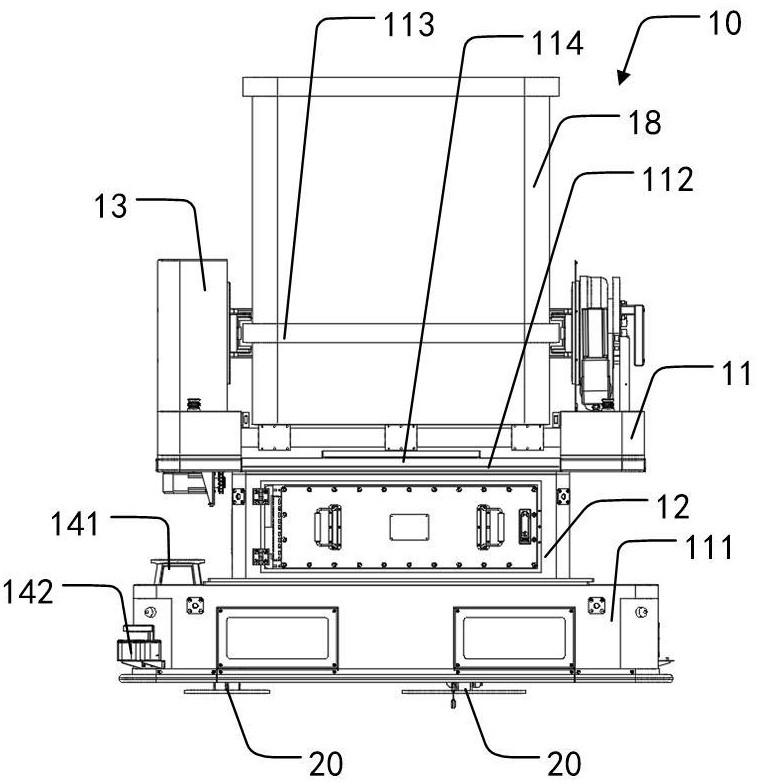
3、本实用新型提供一种防爆式翻转搬运机器人,包括机器人本体,防爆电气箱以及防爆电机。
4、所述机器人本体包括底座、支承座、减速机、转盘支座、回转圆盘、翻转架以及输送机;所所述底座底部设有两个双轮结构,所述支承座固定设置在所述底座的顶部,所述转盘支座对称固定设置在所述支承座上,所述减速机固定设置在所述支承座上,所述回转圆盘转接设置在所述转盘支座上,所述翻转架固定设置在所述回转圆盘上;所述输送机设置在所述支承座上;所述防爆电气箱安装至所述底座与所述支承座之间,所述防爆电气箱包括箱体以及包裹所述箱体的壳体;所述防爆电机安装至所述支承座的顶面的一侧,且所述防爆电机电连接至所述防爆电气箱。
5、进一步地,所述的防爆式翻转搬运机器人还包括防爆雷达,所述防爆雷达安装至所述底座。
6、进一步地,所述防爆电气箱包括至少一个防爆按钮,防爆显示屏,防爆语音播报器以及防爆天线。
7、所述防爆按钮安装至所述壳体的外表面;所述防爆显示屏安装至所述壳体的外表面,且与所述防爆按钮安装至所述壳体的外表面的同一面;所述防爆语音播报器安装至所述壳体的外表面;所述防爆天线安装至所述壳体的外表面,且与所述防爆语音播报器安装至所述壳体的外表面的同一面。
8、进一步地,所述防爆雷达包括防爆激光雷达以及至少两个防爆避障雷达。
9、所述防爆激光雷达安装至所述底座顶面;每一个所述防爆避障雷达分别安装至所述底座侧面的任意一角落处,所述两个防爆避障雷达在所述底座侧面呈对角式安装。
10、进一步地,所述防爆式翻转搬运机器人还包括防爆锂电池,防爆插头以及防爆三色灯。
11、所述防爆锂电池安装至所述底座的内部,且所述防爆锂电池电连接至所述
12、防爆电气箱;所述防爆插头安装至所述底座的外表面,且所述防爆插头电连接至所述防爆电气箱;所述防爆三色灯安装至所述底座的外表面,且所述防爆三色灯电连接至所述防爆电气箱。
13、进一步地,所述防爆式翻转搬运机器人还包括支撑料桶以及限位块。
14、所述支撑料桶安装至所述支承座的顶面;所述限位块安装至所述支承座的顶面,当所述支撑料桶进行翻转时,所述限位块能够对所述支撑料桶进行角度限位。
15、进一步地,所述防爆式翻转搬运机器人还包括对射防爆光电开关以及接近开关。
16、所述对射防爆光电开关安装至所述输送机;所述接近开关安装至所述回转圆盘。
17、进一步地,所述输送机设置为辊筒输送机或链式输送机或带式输送机,所述输送机嵌设在所述支承座内。
18、进一步地,所述输送机外表面包裹一层抗静电聚氨酯包胶。
19、与现有技术相比,本实用新型至少具备以下技术效果:
20、本实用新型提供了一种防爆式翻转搬运机器人,采用防爆电气箱,防爆电机以及防爆雷达等防爆设备,使现有的倒料搬运机器人达到了在涉爆区域使用的要求。
21、其次,防爆式翻转搬运机器人的支撑料桶的轨道为抗静电特氟龙材质,采用多点式分布可以更易于更换,对不同型号的料桶规格更具有实用性,可以有助于现场调试工作;输送机增加抗静电聚氨酯包胶,增加摩擦力,避免料桶卡死;agv采用双多轮结构,实现横向移动功能;agv对角布置2个270°扫描范围的避障雷达,实现整体全方位光学避障,四周布置防爆安全触边,实现整体全方位接触避障;输送机上设有对射防爆光电开关,检测所述支撑料桶位置,避免所述支撑料桶越位碰撞和未到位翻转;设有接近开关,安装至所述回转圆盘,对所述支撑料桶的翻转角度进行限位,通过调节开关位置,实现对所述支撑料桶不同角度的限位;在支撑板上设有限位条,在所述支撑料桶翻转极限位置进行机械限位,避免在电控程序失效的情况下产生所述支撑料桶过转过翻的情况。
技术特征:
1.一种防爆式翻转搬运机器人,其特征在于,包括:
2.如权利要求1所述的防爆式翻转搬运机器人,其特征在于,还包括防爆雷达,安装至所述底座。
3.如权利要求1所述的防爆式翻转搬运机器人,其特征在于,所述防爆电气箱包括:
4.如权利要求2所述的防爆式翻转搬运机器人,其特征在于,所述防爆雷达包括:
5.如权利要求1所述的防爆式翻转搬运机器人,其特征在于,还包括:
6.如权利要求1所述的防爆式翻转搬运机器人,其特征在于,还包括:
7.如权利要求1所述的防爆式翻转搬运机器人,其特征在于,还包括:
8.如权利要求1所述的防爆式翻转搬运机器人,其特征在于,
9.如权利要求1所述的防爆式翻转搬运机器人,其特征在于,所述输送机外表面包裹一层抗静电聚氨酯包胶。
技术总结
本技术提供了一种防爆式翻转搬运机器人,包括机器人本体,防爆电气箱,防爆电机以及防爆雷达,所述机器人本体所述包括底座、支承座、减速机、转盘支座、回转圆盘、翻转架以及输送机;所述防爆电气箱安装至所述底座与所述支承座之间,所述防爆电气箱包括一壳体;所述防爆电机安装至所述支承座的顶面的一侧,且所述防爆电机电连接至所述防爆电气箱。本技术的优点在于,使现有的倒料搬运机器人达到在涉爆区域使用的要求,且实现了倒料搬运机器人的横向移动与全方位避障,保证支撑料桶的运输过程不会打滑,且对支撑料桶的翻转角度实现精准控制。
技术研发人员:杜勇,岳婷婷,刘兴子
受保护的技术使用者:苏州赛福德自动化科技有限公司
技术研发日:20231025
技术公布日:2024/6/20
- 还没有人留言评论。精彩留言会获得点赞!