一种锂电池堆叠兼容夹持机械手的制作方法
本技术涉及一种物料夹取装置,特别是一种锂电池堆叠兼容夹持机械手。
背景技术:
1、在电芯模组的叠片工艺当中需要利用机械手夹取物料,为了增强工作效率,会在同一个机械手上集成多个夹爪,以对多个物料或者单个物料的多个部位进行夹持。但是由于不同物料的夹持位置可能发生变化,需要伺服调整夹爪,因此有必要针对机械手的变距能力做出改进。
技术实现思路
1、为解决上述技术问题,本实用新型提供了一种锂电池堆叠兼容夹持机械手,包括支撑板、多个沿支撑板长度方向排列的夹持件以及为夹持件提供支撑的夹爪支座,所述夹持件通过夹爪支座与所述支撑板活动连接。
2、还包括可沿支撑板长度方向往复移动的锁定件与设置于夹爪支座上的随动件,所述锁定件和随动件相配合以带动夹爪支座移动。
3、进一步地,所述随动件固定设置于夹爪支座上,所述锁定件的端部具有与随动件的端面相配合的卡槽;
4、所述锁定件的后端设置有推拉气缸并连接在所述推拉气缸的活塞轴上。
5、进一步地,所述支撑板沿长度方向设置有带动锁定件移动的直线移动模组。
6、进一步地,所述直线移动模组为直线电机,所述推拉气缸设置于直线电机的滑块上。
7、进一步地,所述支撑板上设置有导向夹爪支座移动位置的第一滑轨,所述夹爪支座通过导轨钳制器连接在第一滑轨上。
8、进一步地,所述夹持件包括相对设置的两组夹爪和带动两组夹爪相对移动的驱动元件。
9、进一步地,所述驱动元件为气动手指,两组夹爪各连接在气动手指上。
10、进一步地,所述夹爪支座上设置有导向夹爪移动位置的第二滑轨,两组所述夹爪分别与第二滑轨滑动相连。
11、进一步地,所述气动手指上连接有光电传感器。
12、进一步地,还包括六轴机器人,所述支撑板安装在六轴机器人的输出端。
13、本实用新型提供了一种锂电池堆叠兼容夹持机械手,包括支撑板和设于支撑板上的夹爪支座、锁定件。锁定件能够沿支撑板移动,夹爪支座用于支撑夹持件,并且在夹爪支座上设置有与锁定件相配合的随动件。当锁定件和随动件相配合时,将锁定件和夹爪支座固定为整体,带动夹爪支座以及夹爪支座上夹持件一起移动,从而实现对夹持件位置的伺服调整。本实用新型提供的夹持机械手具有较好的兼容夹持能力,能够准确识别夹持需求,针对不同的物料调整夹持件的夹持位置,提高工作效率。实施例中在夹爪支座上设置了两套夹持件,以针对不同的物料夹持需求。
技术特征:
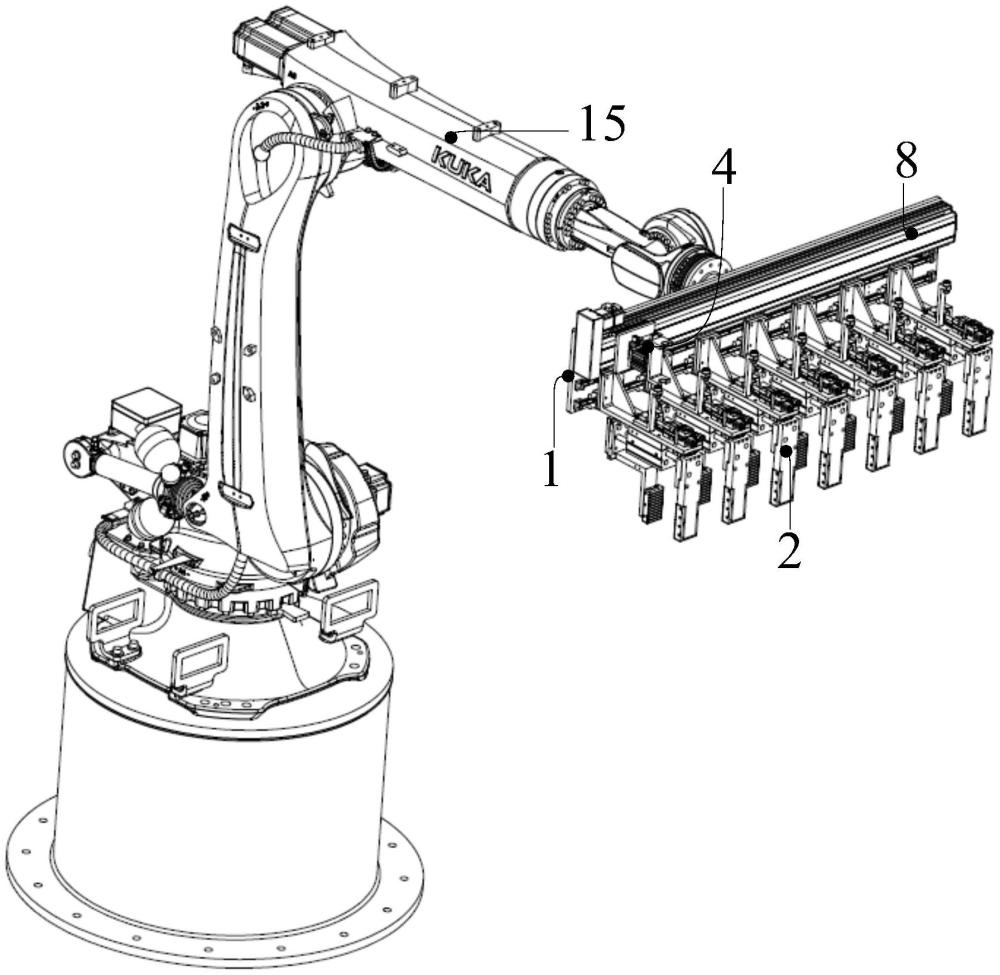
1.一种锂电池堆叠兼容夹持机械手,其特征在于:包括支撑板(1)、多个沿支撑板(1)长度方向排列的夹持件(2)以及为夹持件(2)提供支撑的夹爪支座(3),所述夹持件(2)通过夹爪支座(3)与所述支撑板(1)活动连接;
2.如权利要求1所述的一种锂电池堆叠兼容夹持机械手,其特征在于:所述随动件(5)固定设置于夹爪支座(3)上,所述锁定件(4)的端部具有与随动件(5)的端面相配合的卡槽(7);
3.如权利要求2所述的一种锂电池堆叠兼容夹持机械手,其特征在于:所述支撑板(1)沿长度方向设置有带动锁定件(4)移动的直线移动模组。
4.如权利要求3所述的一种锂电池堆叠兼容夹持机械手,其特征在于:所述直线移动模组为直线电机(8),所述推拉气缸(6)设置于直线电机(8)的滑块上。
5.如权利要求2所述的一种锂电池堆叠兼容夹持机械手,其特征在于:所述支撑板(1)上设置有导向夹爪支座(3)移动位置的第一滑轨(9),所述夹爪支座(3)通过导轨钳制器(10)连接在第一滑轨(9)上。
6.如权利要求5所述的一种锂电池堆叠兼容夹持机械手,其特征在于:所述夹持件(2)包括相对设置的两组夹爪(11)和带动两组夹爪(11)相对移动的驱动元件。
7.如权利要求6所述的一种锂电池堆叠兼容夹持机械手,其特征在于:所述驱动元件为气动手指(12),两组夹爪(11)各连接在气动手指(12)上。
8.如权利要求7所述的一种锂电池堆叠兼容夹持机械手,其特征在于:所述夹爪支座(3)上设置有导向夹爪(11)移动位置的第二滑轨(13),两组所述夹爪(11)分别与第二滑轨(13)滑动相连。
9.如权利要求7所述的一种锂电池堆叠兼容夹持机械手,其特征在于:所述气动手指(12)上连接有光电传感器(14)。
10.如权利要求1至9任一所述的一种锂电池堆叠兼容夹持机械手,其特征在于:还包括六轴机器人(15),所述支撑板(1)安装在六轴机器人(15)的输出端。
技术总结
本技术提供了一种锂电池堆叠兼容夹持机械手,包括支撑板和设于支撑板上的夹爪支座、锁定件。锁定件能够沿支撑板移动,夹爪支座用于支撑夹持件,并且在夹爪支座上设置有与锁定件相配合的随动件。当锁定件和随动件相配合时,将锁定件和夹爪支座固定为整体,带动夹爪支座以及夹爪支座上夹持件一起移动,从而实现对夹持件位置的伺服调整。本技术提供的夹持机械手具有较好的兼容夹持能力,能够针对不同的物料调整夹持件的夹持位置,提高工作效率。
技术研发人员:请求不公布姓名,请求不公布姓名,请求不公布姓名,请求不公布姓名,请求不公布姓名
受保护的技术使用者:江苏烽禾升智能科技有限公司
技术研发日:20231026
技术公布日:2024/7/18
- 还没有人留言评论。精彩留言会获得点赞!