一种具备自适应功能的机器人端拾器的制作方法
本技术涉及了工件输送,尤其涉及一种具备自适应功能的机器人端拾器。
背景技术:
1、现有机器人自动抓取工艺仅能实现从精定位的工装中抓取工件放置到指定工装或定位装置内,松开夹爪后下一工位的夹爪再进行抓取。即使可以采用普通浮动机构抓取到粗定位的工件,也无法进行双机器人在线交接。而工装或定位装置的设置,会导致多个工位节拍增加,且有些工位无法设置中转台导致无法实现对工件的流转。
技术实现思路
1、本实用新型的目的是为了克服现有技术的不足,提供一种具备自适应功能的机器人端拾器,能够实现精准定位和浮动定位的切换,从而能够实现双机器人的在线对接,无需设置工装或定位装置。
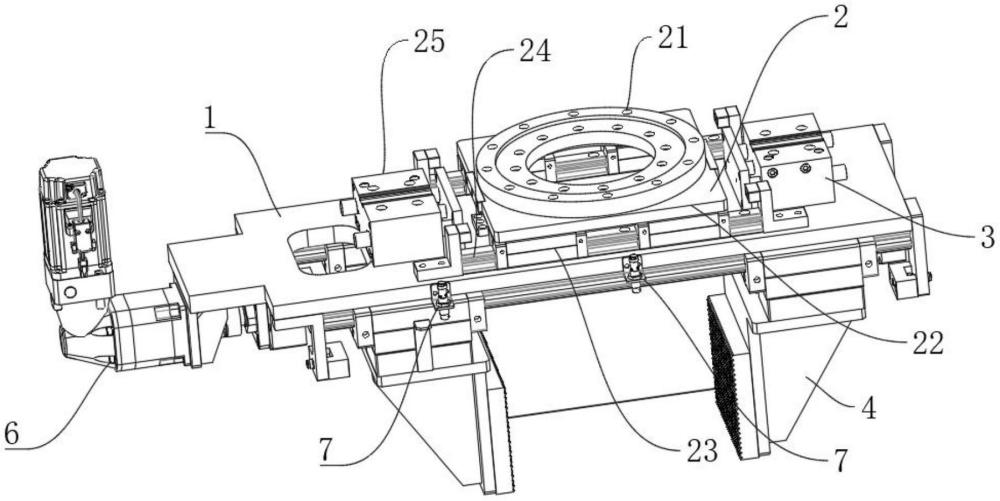
2、本实用新型涉及一种具备自适应功能的机器人端拾器,包括安装板,所述安装板的上表面连接有浮动机构和两个定位装置,所述浮动机构位于两个所述定位装置之间,所述安装板的下表面连接有夹取机构;
3、所述浮动机构包括连接法兰、浮动板、浮动滑块和浮动导轨,所述浮动板连接在所述连接法兰的下表面,所述浮动滑块连接在所述浮动板的下表面,所述浮动导轨连接在所述安装板的上表面,所述浮动滑块沿所述浮动导轨滑动,所述定位装置用于伸出夹持板对所述浮动板进行限位;
4、所述夹取机构包括两个相向或相背同步运动的夹钳,所述夹钳沿连接在所述安装板的底部的夹钳导轨移动,在两个夹钳之间形成用于夹持工件的夹持区间。
5、进一步地,其中一所述夹钳连接有用于检测工件是否到位的检测装置,所述检测装置连接在所述夹钳靠近所述工件的侧面。
6、进一步地,所述夹取机构包括两个夹取滑块,所述滑块与对应的夹钳连接,两个所述夹取滑块分别与正反丝杆连接,正反丝杆连接有驱动组件。
7、进一步地,所述定位装置包括定位气缸,所述夹持板与所述定位气缸的气缸杆连接,在两个夹持板之间形成用于对浮动板进行限位的对中限位区间。
8、进一步地,所述驱动组件包括伺服电机和联轴器,所述联轴器与所述伺服电机的驱动轴连接,所述正反丝杆与所述联轴器连接,所述伺服电机通过伺服电机安装块连接在所述安装板一侧的下表面。
9、进一步地,所述安装板的下表面还连接有丝杆支撑块,所述正反丝杆与所述丝杆支撑块可转动式连接。
10、进一步地,所述浮动导轨的两侧连接有限位块,所述限位块连接在所述安装板的上表面,用于对所述浮动滑块进行限位。
11、进一步地,所述检测装置包括光电传感器、激光传感器或微波传感器。
12、进一步地,所述安装板的侧面连接有到位检测装置,所述到位检测装置用于检测工件的到位信号。
13、本实用新型的有益之处在于:在对接具有粗定位精度的工件时,夹爪处于浮动状态,可以自行适应工件位置,抓取过程中机器人不会出现蹩劲,超负载报警等现象;如对接具有精定位精度的工件时,端拾器也可转换为定位状态,进行精确抓取;
14、抓取工件达到交接区,无需放置到转换台上,即可进行转交任务,交换时,此夹爪切换为浮动状态,两机器人同时抓取同一工件时触发现蹩劲报警信号。
15、为让本实用新型的上述和其他目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附图式,作详细说明如下。
技术特征:
1.一种具备自适应功能的机器人端拾器,包括安装板,其特征在于:所述安装板的上表面连接有浮动机构和两个定位装置,所述浮动机构位于两个所述定位装置之间,所述安装板的下表面连接有夹取机构;
2.根据权利要求1所述的具备自适应功能的机器人端拾器,其特征在于:所述浮动机构包括连接法兰、浮动板、浮动滑块和浮动导轨,所述浮动板连接在所述连接法兰的下表面,所述浮动滑块连接在所述浮动板的下表面,所述浮动导轨连接在所述安装板的上表面,所述浮动滑块沿所述浮动导轨滑动,所述定位装置用于伸出夹持板对所述浮动板进行限位。
3.根据权利要求1所述的具备自适应功能的机器人端拾器,其特征在于:其中一所述夹钳连接有用于检测工件是否到位的检测装置,所述检测装置连接在所述夹钳靠近所述工件的侧面。
4.根据权利要求1所述的具备自适应功能的机器人端拾器,其特征在于:所述夹取机构包括两个夹取滑块,所述滑块与对应的夹钳连接,两个所述夹取滑块分别与正反丝杆连接,正反丝杆连接有驱动组件。
5.根据权利要求1所述的具备自适应功能的机器人端拾器,其特征在于:所述定位装置包括定位气缸,所述夹持板与所述定位气缸的气缸杆连接,在两个夹持板之间形成用于对浮动板进行限位的对中限位区间。
6.根据权利要求3所述的具备自适应功能的机器人端拾器,其特征在于:所述驱动组件包括伺服电机和联轴器,所述联轴器与所述伺服电机的驱动轴连接,所述正反丝杆与所述联轴器连接,所述伺服电机通过伺服电机安装块连接在所述安装板一侧的下表面。
7.根据权利要求5所述的具备自适应功能的机器人端拾器,其特征在于:所述安装板的下表面还连接有丝杆支撑块,所述正反丝杆与所述丝杆支撑块可转动式连接。
8.根据权利要求1所述的具备自适应功能的机器人端拾器,其特征在于:所述浮动导轨的两侧连接有限位块,所述限位块连接在所述安装板的上表面,用于对所述浮动滑块进行限位。
9.根据权利要求2所述的具备自适应功能的机器人端拾器,其特征在于:所述检测装置包括光电传感器、激光传感器或微波传感器。
10.根据权利要求1所述的具备自适应功能的机器人端拾器,其特征在于:所述安装板的侧面连接有到位检测装置,所述到位检测装置用于检测工件的到位信号。
技术总结
本技术涉及的一种具备自适应功能的机器人端拾器,包括安装板,安装板的上表面连接有浮动机构和定位装置,浮动机构位于两个定位装置之间,安装板的下表面连接有夹取机构;浮动机构包括连接法兰、浮动板、浮动滑块和浮动导轨,浮动板连接在连接法兰的下表面,浮动滑块连接在浮动板的下表面,浮动导轨连接在安装板的上表面,浮动滑块沿浮动导轨滑动,定位装置用于伸出夹持板对浮动板进行限位;夹取机构包括两个相向或相背同步运动的夹钳,夹钳沿连接在安装板的底部的夹钳导轨移动,在两个夹钳之间形成用于夹持工件的夹持区间。本技术的有益效果包括能够实现精准定位和浮动定位的切换,从而能够实现双机器人的在线对接,无需设置工装或定位装置。
技术研发人员:王耀冰,吕荣生
受保护的技术使用者:苏州海通机器人系统有限公司
技术研发日:20231027
技术公布日:2024/11/21
- 还没有人留言评论。精彩留言会获得点赞!