一种监测机器人的制作方法
本技术涉及监测机器人,尤其涉及一种监测机器人。
背景技术:
1、检测机器人利用基于视觉、声波、电磁等技术的传感器装置,通过远程遥控的方式,进行检测和调查,检测机器人能够以高精度、高效、高自动化的方式进行检测和维护,极大地提高了安全性和稳定性。
2、现有的监测机器人在使用时,如申请号cn202221074306.8涉及尘埃粒子计数器的技术领域,特别涉及一种监测机器人,包括外壳、监测器和用于支撑外壳移动的运动底盘,外壳固定连接于运动底盘,监测器可拆卸连接于外壳的上方,监测器可拆卸连接于外壳的上端;通过改变外壳的高度,调节监测器的工作位置与底面之间的距离,从而保障监测器可以正常进行,并且监测器在运行过程中运动底盘可以携带外壳移动;然而上述技术中,吸入端只是在固定的高度,而且易于进入小动物,造成设备的损伤,因此,本实用新型提出一种监测机器人以解决现有技术中存在的问题。
技术实现思路
1、针对上述问题,本实用新型提出一种监测机器人,该监测机器人主要是利用减震器、连接座板、液压缸棒、升降机箱的共同配合下进行高度的调节设置,而且安装的移动组件输出动力能够在轨道上进行移动,能够在较大范围内达到调节测量地点的效果,由于端壳具备竖直涵道状构造,而且端壳的内部设置有内条杆,这样能够起到拦截的结构,能够有效的避免小动物的进入,保持设备的完好程度。
2、为实现本实用新型的目的,本实用新型通过以下技术方案实现:一种监测机器人,包括轨道构件和监测机构,所述轨道构件的边侧设置有滚动连接的移动组件,且所述移动组件的底侧设置有螺栓装配的监控部件,所述监控部件的两侧设置有螺栓装配的监测机构;
3、所述监测机构包含有螺栓连杆、空舱、装配板、端壳、内条杆和监测传感器,所述螺栓连杆螺栓连接在所述监控部件的两侧,所述螺栓连杆的一端设置有空舱,且所述空舱的外侧设置有螺栓装配的装配板,所述空舱的两端内侧设置有端壳,所述端壳的内部设置有内条杆,所述空舱的内部设置有监测传感器。
4、作为本实用新型的一种优选实施方式,所述端壳具备竖直涵道状构造,所述监测传感器具备多孔状构造。
5、作为本实用新型的一种优选实施方式,所述轨道构件包含有减压垫、抬高架、吊杆、轨道梁和端封块,所述减压垫的顶侧设置有抬高架,且所述抬高架的顶侧通过吊杆螺栓连接有轨道梁,所述轨道梁的两端设置有端封块。
6、作为本实用新型的一种优选实施方式,所述移动组件包含有轮板、轨道轮、传动机箱、输出轴杆、传动轮组和驱动电机,所述轨道轮在轨道梁上滚动运行,所述轨道轮的一端贯穿轮板连接有传动机箱的输出端,所述传动机箱的内部设置有输出轴杆,且所述输出轴杆的外界绕接有传动轮组,所述传动机箱的外端设置有驱动电机的输出端。
7、作为本实用新型的一种优选实施方式,所述监控部件包含有减震器、连接座板、液压缸棒、升降机箱、旋转电机、旋转轴座、第一铰接基座、第一动臂、第二动臂、电动摆动杆和摄像头,所述减震器设置在所述轮板的底侧,所述减震器的底侧设置有连接座板,且所述连接座板的底端设置有液压缸棒,所述液压缸棒的输出端设置有升降机箱,所述升降机箱的一侧设置有旋转电机。
8、作为本实用新型的一种优选实施方式,所述升降机箱的下方设置有旋转轴座,且所述旋转轴座的下方设置有第一铰接基座,所述第一铰接基座的一侧设置有第一动臂,所述第一动臂的一端设置有第二动臂,所述第二动臂的一端设置有电动摆动杆,且所述电动摆动杆的一端设置有摄像头。
9、本实用新型的有益效果为:
10、本实用新型主要是利用减震器、连接座板、液压缸棒、升降机箱的共同配合下进行高度的调节设置,而且安装的移动组件输出动力能够在轨道上进行移动,能够在较大范围内达到调节测量地点的效果,由于端壳具备竖直涵道状构造,而且端壳的内部设置有内条杆,这样能够起到拦截的结构,能够有效的避免小动物的进入,保持设备的完好程度。
技术特征:
1.一种监测机器人,包括轨道构件(1)和监测机构(4),其特征在于:所述轨道构件(1)的边侧设置有滚动连接的移动组件(2),且所述移动组件(2)的底侧设置有螺栓装配的监控部件(3),所述监控部件(3)的两侧设置有螺栓装配的监测机构(4);
2.根据权利要求1所述的一种监测机器人,其特征在于:所述端壳(404)具备竖直涵道状构造,所述监测传感器(406)具备多孔状构造。
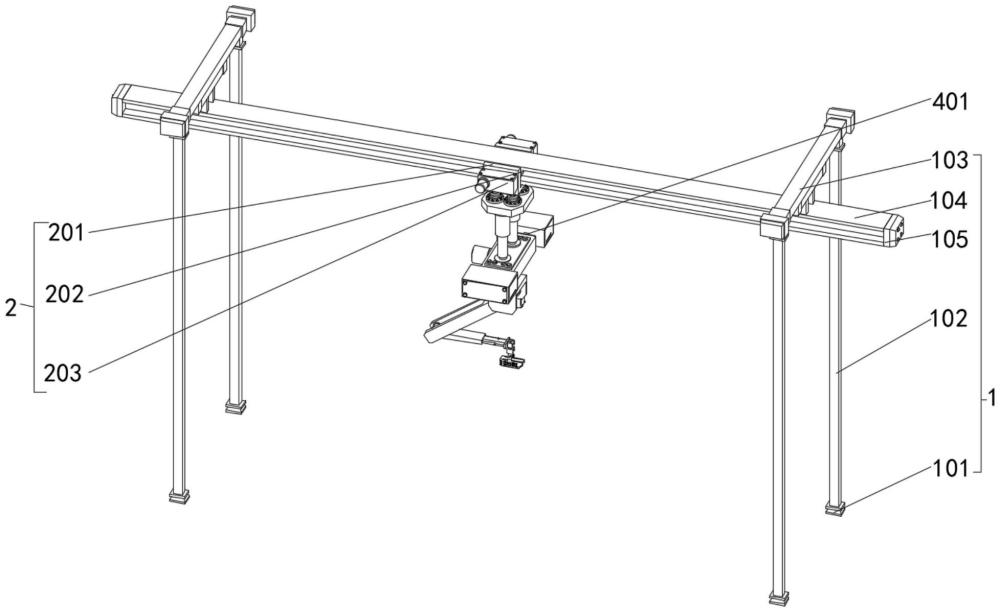
3.根据权利要求1所述的一种监测机器人,其特征在于:所述轨道构件(1)包含有减压垫(101)、抬高架(102)、吊杆(103)、轨道梁(104)和端封块(105),所述减压垫(101)的顶侧设置有抬高架(102),且所述抬高架(102)的顶侧通过吊杆(103)螺栓连接有轨道梁(104),所述轨道梁(104)的两端设置有端封块(105)。
4.根据权利要求3所述的一种监测机器人,其特征在于:所述移动组件(2)包含有轮板(201)、轨道轮(202)、传动机箱(203)、输出轴杆(204)、传动轮组(205)和驱动电机(206),所述轨道轮(202)在轨道梁(104)上滚动运行,所述轨道轮(202)的一端贯穿轮板(201)连接有传动机箱(203)的输出端,所述传动机箱(203)的内部设置有输出轴杆(204),且所述输出轴杆(204)的外界绕接有传动轮组(205),所述传动机箱(203)的外端设置有驱动电机(206)的输出端。
5.根据权利要求4所述的一种监测机器人,其特征在于:所述监控部件(3)包含有减震器(301)、连接座板(302)、液压缸棒(303)、升降机箱(304)、旋转电机(305)、旋转轴座(306)、第一铰接基座(307)、第一动臂(308)、第二动臂(309)、电动摆动杆(3010)和摄像头(3011),所述减震器(301)设置在所述轮板(201)的底侧,所述减震器(301)的底侧设置有连接座板(302),且所述连接座板(302)的底端设置有液压缸棒(303),所述液压缸棒(303)的输出端设置有升降机箱(304),所述升降机箱(304)的一侧设置有旋转电机(305)。
6.根据权利要求5所述的一种监测机器人,其特征在于:所述升降机箱(304)的下方设置有旋转轴座(306),且所述旋转轴座(306)的下方设置有第一铰接基座(307),所述第一铰接基座(307)的一侧设置有第一动臂(308),所述第一动臂(308)的一端设置有第二动臂(309),所述第二动臂(309)的一端设置有电动摆动杆(3010),且所述电动摆动杆(3010)的一端设置有摄像头(3011)。
技术总结
本技术提供了一种监测机器人,涉及监测机器人技术领域,包括轨道构件和监测机构,所述轨道构件的边侧设置有滚动连接的移动组件,且所述移动组件的底侧设置有螺栓装配的监控部件,所述监控部件的两侧设置有螺栓装配的监测机构,所述监测机构包含有螺栓连杆、空舱、装配板;本技术主要是利用减震器、连接座板、液压缸棒、升降机箱的共同配合下进行高度的调节设置,而且安装的移动组件输出动力能够在轨道上进行移动,能够在较大范围内达到调节测量地点的效果,由于端壳具备竖直涵道状构造,而且端壳的内部设置有内条杆,这样能够起到拦截的结构,能够有效的避免小动物的进入,保持设备的完好程度。
技术研发人员:乔洪波,高兴云,王克华,吕常笑
受保护的技术使用者:山东汇德地理信息工程有限公司
技术研发日:20231030
技术公布日:2024/6/23
- 还没有人留言评论。精彩留言会获得点赞!