一种抗电磁干扰的防爆巡检机器人的制作方法
本技术涉及气体监测,具体为一种抗电磁干扰的防爆巡检机器人。
背景技术:
1、移动布控特殊作业监测仪利用物联网、气体实时监测、远程通讯等技术,综合应用现场监控设备、手持防爆终端和软件平台,构建特殊高危作业智能监控平台,实现特殊高危作业从作业申报、作业条件核查、作业过程监控到作业结束得全过程闭环管理。作业过程中,通过对作业现场的视频监控、监护人和施工负责人在场监控、现场可燃气体和有毒有害气体实时检测以及作业人员行为监控,实时对特殊高危作业过程实时、全方位、智能化监管,发现作业过程存在风险及时预警报警。
2、但是现有的气体巡检机器人在对现场气体进行检测时,机器人在强电场区域或强磁区域工作时,以及在人为恶意干扰下会导致的机器人发生失控事故,影响检测的正常进行。
3、于是,有鉴于此,针对现有的结构及缺失予以研究改良,提供有一种抗电磁干扰的防爆巡检机器人。
技术实现思路
1、本实用新型的目的在于提供一种抗电磁干扰的防爆巡检机器人,以解决上述背景技术中提出的问题。
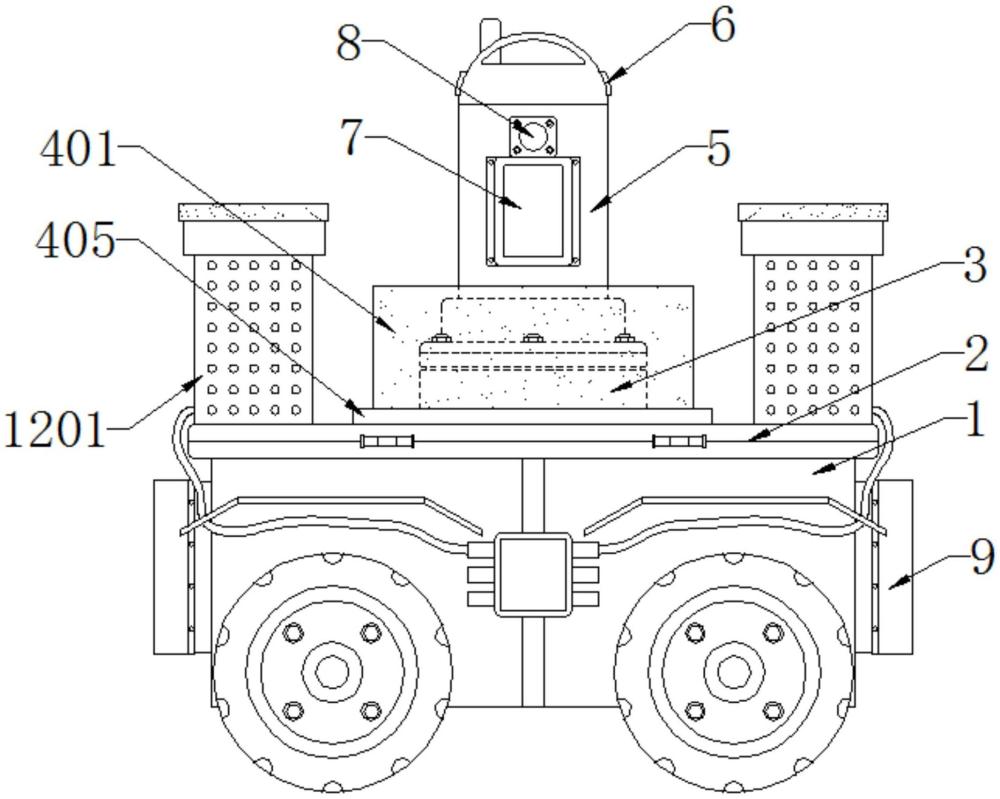
2、为实现上述目的,本实用新型提供如下技术方案:一种抗电磁干扰的防爆巡检机器人,包括器体和抗干扰组件,所述器体的顶部通过合页安装有维护顶板,且维护顶板的中部安装有旋转台,用于抗外来强磁干扰的所述抗干扰组件设置于旋转台的外部,且抗干扰组件包括外金属板、限位杆、内金属板、电动推杆和底盒,所述外金属板内部设置有限位杆,且限位杆的端部连接有内金属板,所述外金属板的下端安装有电动推杆,且电动推杆的下端安装有底盒。
3、进一步的,所述旋转台的上端安装有监测仪,且监测仪顶部的两侧设置有声光报警器。
4、进一步的,所述监测仪的前端安装有触控屏幕,且触控屏幕的上方设置有摄像头。
5、进一步的,所述器体的左右侧设置有防撞块,且防撞块设置有两块。
6、进一步的,所述维护顶板顶部的两侧安装有安装架,且安装架的侧边安装有检测仪。
7、进一步的,所述检测仪的外部设置有用于外防护的辅助组件,且辅助组件设置有两组。
8、进一步的,所述辅助组件包括辅助环和透气孔,且辅助环的表面开设有透气孔。
9、进一步的,所述辅助组件还包括风扇和防尘网,所述辅助环的顶部安装有风扇,且风扇的上端安装有防尘网。
10、本实用新型提供了一种抗电磁干扰的防爆巡检机器人,具备以下有益效果:
11、1、本实用新型通过外金属板和内金属板均采用铝金属材料,使得外金属板和内金属板可以反射和吸收电磁辐射,从而防止电磁的干扰,避免强电场区域或强磁区域工作以及在人为恶意干扰下会导致的机器人发生失控事故,限位杆使得外金属板在上下移动时增加稳定度,电动推杆通过伸缩控制外金属板的高度移动,使得外金属板和内金属板重合面积增大,即增加抗干扰的防护面积。
12、2、本实用新型通过防撞块使得机器人在移动时缓冲侧边的碰撞,安装架用于检测仪的安装,使得检测仪配合监测仪完成气体探测和信号的传输,预防危险,辅助环在检测仪外部起到外防护作用,避免碰撞影响检测端,透气孔用于气体的进入,风扇可促进气体的流动,使得检测仪更快的对气体进行检测,防尘网对进入风扇端的气体起到除尘的作用。
技术特征:
1.一种抗电磁干扰的防爆巡检机器人,包括器体(1)和抗干扰组件(4),其特征在于,所述器体(1)的顶部通过合页安装有维护顶板(2),且维护顶板(2)的中部安装有旋转台(3),用于抗外来强磁干扰的所述抗干扰组件(4)设置于旋转台(3)的外部,且抗干扰组件(4)包括外金属板(401)、限位杆(402)、内金属板(403)、电动推杆(404)和底盒(405),所述外金属板(401)内部设置有限位杆(402),且限位杆(402)的端部连接有内金属板(403),所述外金属板(401)的下端安装有电动推杆(404),且电动推杆(404)的下端安装有底盒(405)。
2.根据权利要求1所述的一种抗电磁干扰的防爆巡检机器人,其特征在于,所述旋转台(3)的上端安装有监测仪(5),且监测仪(5)顶部的两侧设置有声光报警器(6)。
3.根据权利要求2所述的一种抗电磁干扰的防爆巡检机器人,其特征在于,所述监测仪(5)的前端安装有触控屏幕(7),且触控屏幕(7)的上方设置有摄像头(8)。
4.根据权利要求1所述的一种抗电磁干扰的防爆巡检机器人,其特征在于,所述器体(1)的左右侧设置有防撞块(9),且防撞块(9)设置有两块。
5.根据权利要求1所述的一种抗电磁干扰的防爆巡检机器人,其特征在于,所述维护顶板(2)顶部的两侧安装有安装架(10),且安装架(10)的侧边安装有检测仪(11)。
6.根据权利要求5所述的一种抗电磁干扰的防爆巡检机器人,其特征在于,所述检测仪(11)的外部设置有用于外防护的辅助组件(12),且辅助组件(12)设置有两组。
7.根据权利要求6所述的一种抗电磁干扰的防爆巡检机器人,其特征在于,所述辅助组件(12)包括辅助环(1201)和透气孔(1202),且辅助环(1201)的表面开设有透气孔(1202)。
8.根据权利要求7所述的一种抗电磁干扰的防爆巡检机器人,其特征在于,所述辅助组件(12)还包括风扇(1203)和防尘网(1204),所述辅助环(1201)的顶部安装有风扇(1203),且风扇(1203)的上端安装有防尘网(1204)。
技术总结
本技术公开了一种抗电磁干扰的防爆巡检机器人,涉及气体监测技术领域,包括器体和抗干扰组件,所述器体的顶部通过合页安装有维护顶板,且维护顶板的中部安装有旋转台,用于抗外来强磁干扰的所述抗干扰组件设置于旋转台的外部,且抗干扰组件包括外金属板、限位杆、内金属板、电动推杆和底盒,所述外金属板内部设置有限位杆,且限位杆的端部连接有内金属板,所述外金属板的下端安装有电动推杆。该一种抗电磁干扰的防爆巡检机器人通过外金属板和内金属板均采用铝金属材料,使得外金属板和内金属板可以反射和吸收电磁辐射,从而防止电磁的干扰,避免强电场区域或强磁区域工作以及在人为恶意干扰下会导致的机器人发生失控事故。
技术研发人员:邓若愚
受保护的技术使用者:同济人工智能研究院(苏州)有限公司
技术研发日:20231106
技术公布日:2024/8/15
- 还没有人留言评论。精彩留言会获得点赞!