柔性三轴机械手及桁架机械手的制作方法
本技术涉及机械手,特别涉及柔性三轴机械手及桁架机械手。
背景技术:
1、机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置;特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。
2、目前三轴机械手比如公开号为cn109623798a的公开发明,该一种三轴机械手,包括第一机械轴,第二机械轴,第三机械轴和机械手,位于第一机械轴的上部水平垂直于第一机械轴的第二机械轴通过第一连接组件与第一机械轴相连,位于第二机械轴的侧部竖直垂直于第二机械轴的第三机械轴通过第二连接组件件与第二机械轴相连,所述机械手位于第三机械轴的底部,机械手通过第三连接组件与第三机械轴相连。本发明技术方案的有益效果是:本发明技术方案可以非常精确平稳地夹取,上下和水平移动,将物品送到指定位置并放置于该指定位置,但仍然存在以下问题。
3、其用于抓取的机械手设于第三机械轴上,无法在高于第三机械轴以上位置进行物料的抓取和放置,具有一定的局限性,且一些更加灵活的机械手则结构复杂,在大型工厂使用成本较高。
技术实现思路
1、为解决上述技术问题,本实用新型提供了柔性三轴机械手及桁架机械手。
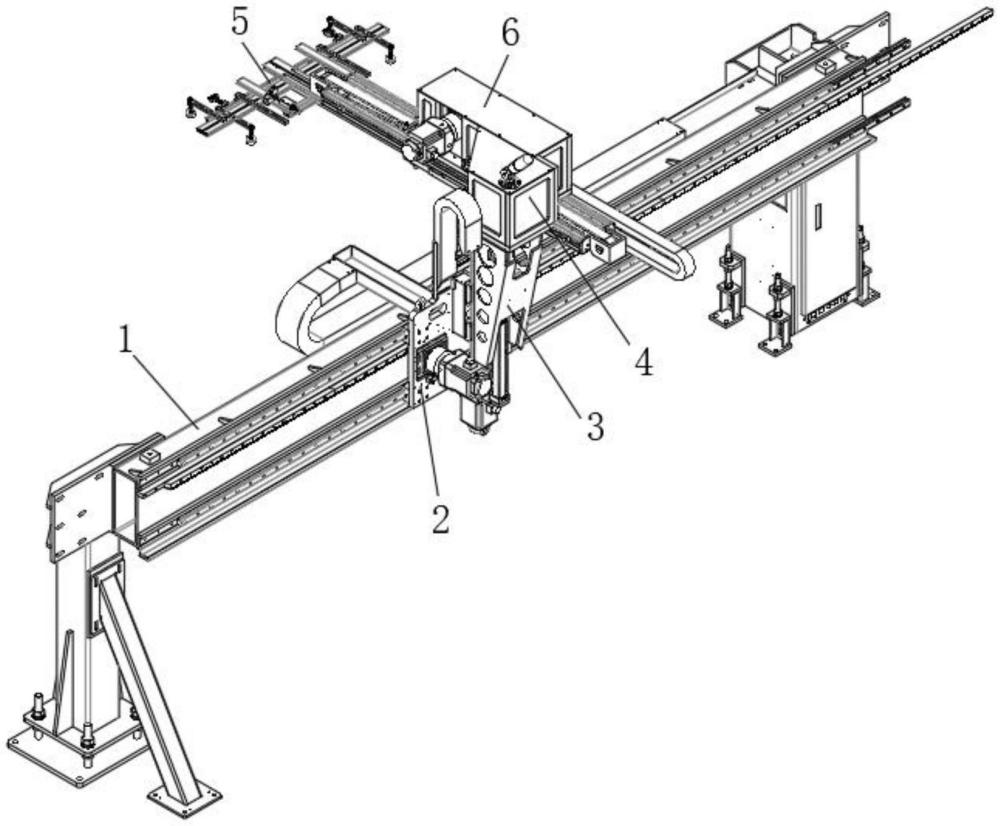
2、本实用新型的技术方案是:柔性三轴机械手,包括:横架;设于所述横架上沿其长度方向运动的x轴组件;搭载于所述x轴组件上用于竖直方向移动的z轴组件;位于所述z轴组件上与所述x轴组件垂直的y轴组件;以及,设于所述y轴组件上的抓取组件;其中,所述x轴组件包括能够沿所述横架长度方向直线往复运动的滑动件,该滑动件通过滑块滑动连接于所述横架上,所述滑动件用于所述z轴组件搭载;固于所述横架上且沿其长度方向设置的两滑轨,该滑轨与所述滑动件滑动连接;位于两所述滑轨之间并沿其长度方向设置的齿排;所述滑动件朝向所述横架的一侧设有用于与所述齿排啮合的齿轮;设于所述横架上并与所述滑动件固连的第一拖链。
3、进一步的,所述滑动件设有用于驱动的第一伺服电机,所述滑动件上还设有与所述第一伺服电机输出轴传动连接的第一减速机,该第一减速机的输出轴与所述齿轮固定连接。
4、进一步的,所述z轴组件包括设于所述滑动件上且沿所述z轴方向直线往复运动的连接架,所述连接架用于y轴组件的安装;固设于所述滑动件上用于连接架滑动的底座;设于所述滑动件上且用于驱动所述连接架沿z轴方向运动的驱动组件;设于所述滑动件上并与所述连接架固连的第二拖链。
5、进一步的,所述驱动组件包括固于所述滑动件上的第二伺服电机;与所述第二伺服电机输出轴传动连接的丝杠组件,该丝杠组件用于带动连接架升降;以及设于第二伺服电机上并与所述连接架连接的配重气缸。
6、进一步的,所述y轴组件包括固于所述连接架上的连接框;固于所述连接框上的传动框;设于所述传动框底部且沿y轴方向运动用于所述抓取组件安装的传动板,所述传动板用于抓取组件的安装;设于所述传动框内用于滑动件沿y轴运动的同步轮组件。
7、进一步的,所述同步轮组件由主动轮、从动轮、引导轮以及若干同步带组成。
8、进一步的,所述抓取组件包括固定所述传动板上的延伸杆;设于所述延伸杆一端的扩展架;以及设于所述扩展架上的若干吸盘组件。
9、桁架机械手,包括柔性三轴机械手,多组柔性三轴机械手沿长度方向依次设置组成桁架机械手。
10、本实用新型的有益技术效果是:由于y轴组件设于z轴组件上,因此y轴的高度可随z轴组件的驱动而调节,而z轴组件安装在x轴上,因此可随意调节抓取组件的抓取位置,且z轴的安装方向可根据实际情况进行变更,使其在较低或者较高处均能抓取和放置物料,进一步增加灵活性,且x轴组件可根据实际情况将多组横架沿长度方向组合,形成超长的横架,并使齿排与滑轨对齐,进一步增加抓取组件的活动空间,由于z、y轴组件采用模块化的形式安装在横架上,因此在实际使用时方便进行添加或者减少,便于大型生产车间使用,另外,结构简单,并采用外露式,因此在维护时更加方便快捷。
技术特征:
1.一种柔性三轴机械手,其特征在于,包括:
2.根据权利要求1所述的柔性三轴机械手,其特征在于,所述滑动件(2)设有用于驱动的第一伺服电机(24),所述滑动件(2)上还设有与所述第一伺服电机(24)输出轴传动连接的第一减速机(25),该第一减速机(25)的输出轴与所述齿轮(26)固定连接。
3.根据权利要求1所述的柔性三轴机械手,其特征在于,所述z轴组件包括设于所述滑动件(2)上且沿所述z轴方向直线往复运动的连接架(3),所述连接架(3)用于y轴组件的安装;固设于所述滑动件(2)上用于连接架(3)滑动的底座(31);设于所述滑动件(2)上且用于驱动所述连接架(3)沿z轴方向运动的驱动组件;设于所述滑动件(2)上并与所述连接架(3)固连的第二拖链(35)。
4.根据权利要求3所述的柔性三轴机械手,其特征在于,所述驱动组件包括固于所述滑动件(2)上的第二伺服电机(32);与所述第二伺服电机(32)输出轴传动连接的丝杠组件(33),该丝杠组件(33)用于带动连接架(3)升降;以及设于第二伺服电机(32)上并与所述连接架(3)连接的配重气缸(34)。
5.根据权利要求3所述的柔性三轴机械手,其特征在于,所述y轴组件包括固于所述连接架(3)上的连接框(4);固于所述连接框(4)上的传动框(41);设于所述传动框(41)底部且沿y轴方向运动用于所述抓取组件安装的传动板(42),所述传动板(42)用于抓取组件的安装;设于所述传动框(41)内用于滑动件(2)沿y轴运动的同步轮组件(43)。
6.根据权利要求5所述的柔性三轴机械手,其特征在于,所述同步轮组件(43)由主动轮、从动轮、引导轮以及若干同步带组成。
7.根据权利要求5所述的柔性三轴机械手,其特征在于,所述抓取组件包括固定所述传动板(42)上的延伸杆(5);设于所述延伸杆(5)一端的扩展架(51);以及设于所述扩展架(51)上的若干吸盘组件(52)。
8.一种桁架机械手,其特征在于,包括如权利要求1-7任一项所述的柔性三轴机械手,多组柔性三轴机械手沿长度方向依次设置组成桁架机械手。
技术总结
本技术公开了一种柔性三轴机械手及桁架机械手,属于机械手技术领域。该机械手包括:横架;设于横架上沿其长度方向运动的X轴组件;搭载于所述X轴组件上用于竖直方向移动的Z轴组件;位于所述Z轴组件上与所述X轴组件垂直的Y轴组件;以及,设于所述Y轴组件上的抓取组件。该柔性三轴机械手及桁架机械手,通过X轴组件、Y轴组件和Z轴组件用于满足抓取组件的三轴运动,Y轴的高度可随Z轴组件的驱动而调节,而Z轴组件安装在X轴上,因此可随意调节抓取机构的抓取位置,且Z轴的安装方向可根据实际情况进行变更,使其在较低或者较高处均能抓取和放置物料,进一步增加灵活性。
技术研发人员:樊秋虎,吕永升,许国艳
受保护的技术使用者:昆山威创自动化科技有限公司
技术研发日:20231107
技术公布日:2024/6/18
- 还没有人留言评论。精彩留言会获得点赞!