一种码垛机器人码垛校验装置的制作方法
本技术涉及码垛,尤其涉及一种码垛机器人码垛校验装置。
背景技术:
1、近年来,随着工业自动化的发展和普及,码垛机器人作为一种高效、智能的物流设备,越来越广泛地应用于物料堆垛和物流运输等领域。
2、在码垛机器人的操作过程中,涉及到物体的定位、堆垛、压实等多环节,然而,受物体坐标不确定性和机器人控制精度的限制,可能会导致物体定位的误差,从而影响机器人将物体准确地码放到目标位置上,导致码垛结果的偏离,另外,在堆垛过程中,也会因物体的不规则形状和摆放位置的微小偏差,可能会导致堆垛高度或物体之间的间隔出现误差,进而影响码垛的稳定性和对齐度,并导致堆叠不平衡或物体间的碰撞、倾斜等问题的出现,这些误差和偏差的存在,很容易导致码垛结果的准确性和质量受到影响。因此,针对该问题,本实用新型出了一种码垛机器人码垛校验装置。
技术实现思路
1、本实用新型的目的是为了解决现有技术中问题,而提出的一种码垛机器人码垛校验装置。
2、为了实现上述目的,本实用新型采用了如下技术方案:
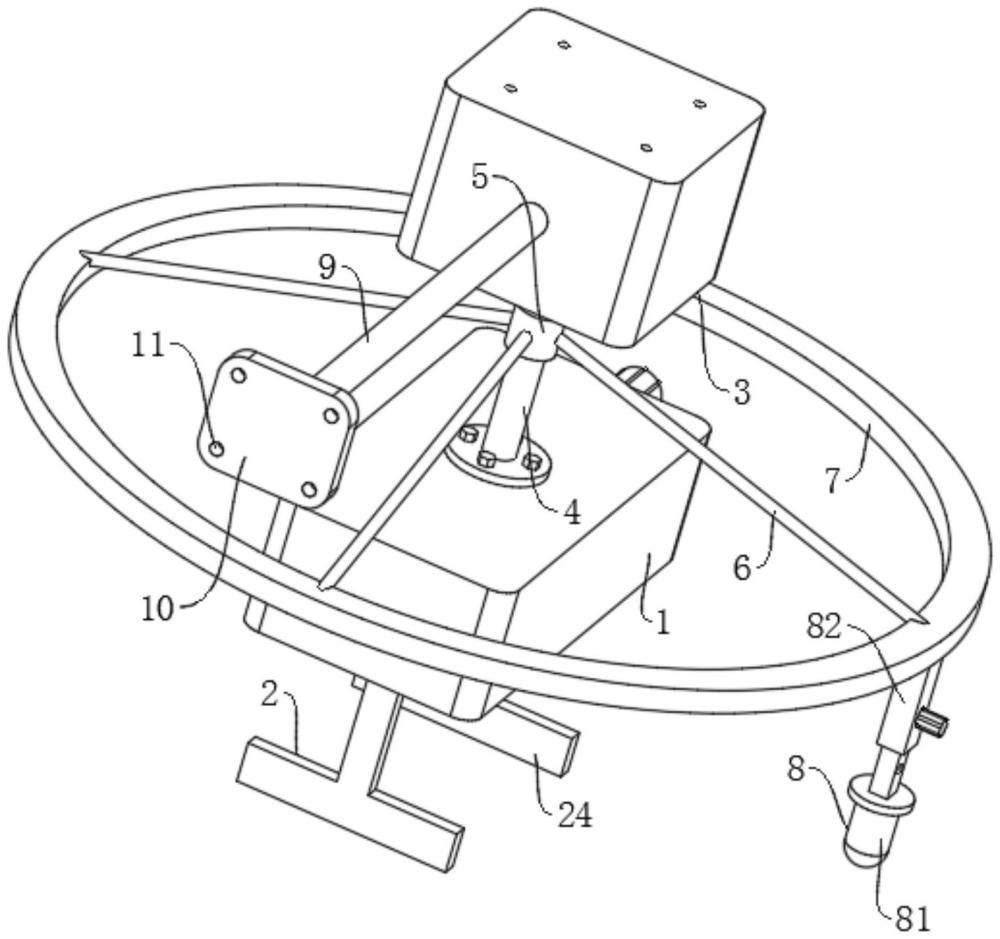
3、一种码垛机器人码垛校验装置,包括壳体及设置在所述壳体底部下方的抓取机构,所述壳体的上方设有连接壳,所述连接壳与所述壳体之间转动设置有转杆,所述转杆的表面固定有固定套,所述固定套的表面固定有多个呈圆周分布的连接杆,所述连接杆的另一端固定有环形盘,所述环形盘上设置有检测机构。
4、优选地,所述抓取机构包括安装在所述壳体一侧的驱动部一,所述驱动部一的输出端连接有转动设置在所述壳体内侧壁之间的双向螺纹杆,所述双向螺纹杆的表面螺纹连接有一对移动块,所述移动块的底部固定有夹板。
5、优选地,所述壳体的内侧壁固定有一对导向杆,所述移动块与所述导向杆的表面滑动连接。
6、优选地,所述检测机构包括摄像头,所述摄像头的顶部与所述环形盘的底部之间设有连接部。
7、优选地,所述连接部为气缸结构。
8、优选地,所述壳体的一侧固定有安装杆,所述安装杆的另一端固定有安装块,所述安装块上开设有多个安装孔,所述连接壳的内底壁安装有与所述转杆连接的驱动部二。
9、与现有技术相比,本实用新型提供了一种码垛机器人码垛校验装置,具备以下有益效果:
10、该码垛机器人码垛校验装置,通过连接壳、转杆、固定套、连接杆和环形盘等结构之间的配合,是为了使摄像头能够在抓取机构周围进行旋转,以实现对码垛机器人的实时物体定位检测和堆垛监测,通过对摄像头观察到的堆叠物体的高度和各个物体之间的间隔进行分析,能够实时监测堆叠的稳定性和堆垛结果的质量,如果出现偏差或不稳定情况,可以及时发出警报或指示,引导操作人员进行调整。
技术特征:
1.一种码垛机器人码垛校验装置,其特征在于,包括壳体(1)及设置在所述壳体(1)底部下方的抓取机构(2),所述壳体(1)的上方设有连接壳(3),所述连接壳(3)与所述壳体(1)之间转动设置有转杆(4),所述转杆(4)的表面固定有固定套(5),所述固定套(5)的表面固定有多个呈圆周分布的连接杆(6),所述连接杆(6)的另一端固定有环形盘(7),所述环形盘(7)上设置有检测机构(8)。
2.根据权利要求1所述的一种码垛机器人码垛校验装置,其特征在于,所述抓取机构(2)包括安装在所述壳体(1)一侧的驱动部一(21),所述驱动部一(21)的输出端连接有转动设置在所述壳体(1)内侧壁之间的双向螺纹杆(22),所述双向螺纹杆(22)的表面螺纹连接有一对移动块(23),所述移动块(23)的底部固定有夹板(24)。
3.根据权利要求2所述的一种码垛机器人码垛校验装置,其特征在于,所述壳体(1)的内侧壁固定有一对导向杆(25),所述移动块(23)与所述导向杆(25)的表面滑动连接。
4.根据权利要求1所述的一种码垛机器人码垛校验装置,其特征在于,所述检测机构(8)包括摄像头(81),所述摄像头(81)的顶部与所述环形盘(7)的底部之间设有连接部(82)。
5.根据权利要求4所述的一种码垛机器人码垛校验装置,其特征在于,所述连接部(82)为气缸结构。
6.根据权利要求1所述的一种码垛机器人码垛校验装置,其特征在于,所述壳体(1)的一侧固定有安装杆(9),所述安装杆(9)的另一端固定有安装块(10),所述安装块(10)上开设有多个安装孔(11),所述连接壳(3)的内底壁安装有与所述转杆(4)连接的驱动部二(12)。
技术总结
本技术公开了一种码垛机器人码垛校验装置,属于码垛技术领域,包括壳体及设置在所述壳体底部下方的抓取机构,所述壳体的上方设有连接壳,所述连接壳与所述壳体之间转动设置有转杆,所述转杆的表面固定有固定套,所述固定套的表面固定有多个呈圆周分布的连接杆,所述连接杆的另一端固定有环形盘,所述环形盘上设置有检测机构;本技术通过连接壳、转杆、固定套、连接杆和环形盘等结构之间的配合,是为了使摄像头能够在抓取机构周围进行旋转,以实现对码垛机器人的实时物体定位检测和堆垛监测,通过对摄像头观察到的堆叠物体的高度和各个物体之间的间隔进行分析,能够实时监测堆叠的稳定性和堆垛结果的质量。
技术研发人员:潘结胜,耿军,鹿建强,龙健
受保护的技术使用者:合肥永匠自动化科技有限公司
技术研发日:20231108
技术公布日:2024/5/12
- 还没有人留言评论。精彩留言会获得点赞!