一种手动圆筒类柔性对心抓手的制作方法
本技术涉及机械抓手,具体为一种手动圆筒类柔性对心抓手。
背景技术:
1、业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。工业机器人由主体、驱动系统和控制系统三个基本部分组成。主体即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构。大多数工业机器人有3~6个运动自由度,其中腕部通常有1~3个运动自由度;驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作;控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。
2、使用对心抓手前,通常需要对对心抓手上的夹持部件进行调整,使得夹持部件在夹持台上进行滑动,通过调节夹持部件来对不同大小工件进行夹持;但是,该种方式对夹持部件调节的比较简单,若是遇到较大的工件时,则夹持部件就无法对工件进行夹持;从而导致使用效果比较差。
3、所以我们提出了一种手动圆筒类柔性对心抓手,以便于解决上述中提出的问题。
技术实现思路
1、本实用新型的目的在于解决无法对较大的工件进行夹持的问题。
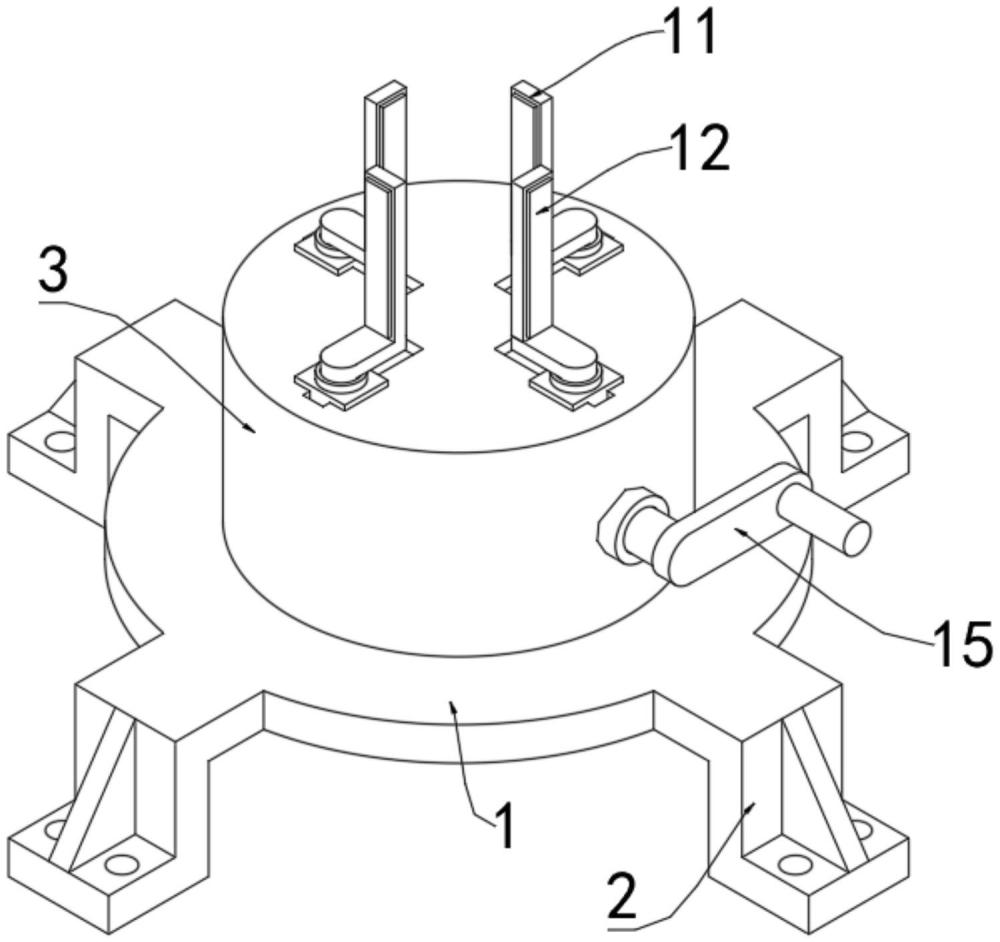
2、为实现上述目的,本实用新型采用如下技术方案:一种手动圆筒类柔性对心抓手,包括底座和固定在底座上的筒体,所述筒体内安装有螺杆和调节杆,所述调节杆的一端通过啮合组件与螺杆连接;所述螺杆的上部安装有拉动组件,所述筒体的上部安装有多个与拉动组件连接的滑块,所述滑块的顶部固定有转筒,所述转筒上转动安装有伸缩部件,所述伸缩部件的一端安装有夹持板。
3、进一步地,所述啮合组件包括固定在调节杆一端的主动锥形齿轮和固定在螺杆上的从动锥形齿轮,且主动锥形齿轮与从动锥形齿轮相啮合。
4、进一步地,所述拉动组件包括螺纹安装在螺杆上的螺纹座,所述螺纹座的外表面沿圆周方向铰接有多个拉杆,且拉杆的一端与滑块的底部铰接。
5、进一步地,所述伸缩部件包括转动安装在转筒上的转动轴和固定在转动轴顶部的收纳杆,所述收纳杆内滑动安装有伸缩板,所述伸缩板的一端与夹持板的下部固定连接。
6、进一步地,所述伸缩板的顶部等距开设有多个第一固定孔,所述收纳杆上安装有与第一固定孔配合使用的第一螺栓。
7、进一步地,所述转筒的外表面对称安装有与转动轴配合使用的锁止组件,所述锁止组件包括固定在转筒外表面的调节筒,所述调节筒内螺纹安装有第二螺栓,所述转动轴的外表面开设有与第二螺栓配合使用的第二固定孔。
8、进一步地,所述调节杆的外端穿过筒体固定有把手,所述把手上设置有防滑涂层。
9、进一步的的,所述夹持板的两侧均固定有橡胶垫。
10、进一步的,所述底座的外表面沿圆周方向等距固定有多个安装座,且安装座上安装有固定螺栓。
11、本实用新型的有益效果:
12、本实用新型的转筒和伸缩部件采用转动方式连接,从而伸缩部件能够带动夹持板进行一百八十度旋转,从而能够改变夹持板与筒体圆心的距离,从而通过多个夹持板配合的情况下能够对较大的工件进行夹持。
13、本实用新型通过伸缩部件的设置,第一方面;四个伸缩部件同时伸长分别带动夹持板移动,还能够延长夹持板与筒体圆心的距离,能够对更大的工件进行夹持;第二方面、还能够单独调节两个相对照的夹持板,使得两个夹持板之间的间距发生改变,从而能够对方形工件进行夹持,提升该对心抓手的使用效果。
技术特征:
1.一种手动圆筒类柔性对心抓手,包括底座(1)和固定在底座(1)上的筒体(3),其特征在于:所述筒体(3)内安装有螺杆(4)和调节杆(5),所述调节杆(5)的一端通过啮合组件(6)与螺杆(4)连接;所述螺杆(4)的上部安装有拉动组件,所述筒体(3)的上部安装有多个与拉动组件连接的滑块(9),所述滑块(9)的顶部固定有转筒(10),所述转筒(10)上转动安装有伸缩部件,所述伸缩部件的一端安装有夹持板(11)。
2.根据权利要求1所述的一种手动圆筒类柔性对心抓手,其特征在于:所述啮合组件(6)包括固定在调节杆(5)一端的主动锥形齿轮(61)和固定在螺杆(4)上的从动锥形齿轮(62),且主动锥形齿轮(61)与从动锥形齿轮(62)相啮合。
3.根据权利要求1所述的一种手动圆筒类柔性对心抓手,其特征在于:所述拉动组件包括螺纹安装在螺杆(4)上的螺纹座(7),所述螺纹座(7)的外表面沿圆周方向铰接有多个拉杆(8),且拉杆(8)的一端与滑块(9)的底部铰接。
4.根据权利要求1所述的一种手动圆筒类柔性对心抓手,其特征在于:所述伸缩部件包括转动安装在转筒(10)上的转动轴(131)和固定在转动轴(131)顶部的收纳杆(132),所述收纳杆(132)内滑动安装有伸缩板(133),所述伸缩板(133)的一端与夹持板(11)的下部固定连接。
5.根据权利要求4所述的一种手动圆筒类柔性对心抓手,其特征在于:所述伸缩板(133)的顶部等距开设有多个第一固定孔(134),所述收纳杆(132)上安装有与第一固定孔(134)配合使用的第一螺栓(135)。
6.根据权利要求5所述的一种手动圆筒类柔性对心抓手,其特征在于:所述转筒(10)的外表面对称安装有与转动轴(131)配合使用的锁止组件(14),所述锁止组件(14)包括固定在转筒(10)外表面的调节筒(141),所述调节筒(141)内螺纹安装有第二螺栓(142),所述转动轴(131)的外表面开设有与第二螺栓(142)配合使用的第二固定孔(136)。
7.根据权利要求1所述的一种手动圆筒类柔性对心抓手,其特征在于:所述调节杆(5)的外端穿过筒体(3)固定有把手(15),所述把手(15)上设置有防滑涂层。
8.根据权利要求1所述的一种手动圆筒类柔性对心抓手,其特征在于:所述夹持板(11)的两侧均固定有橡胶垫(12)。
9.根据权利要求1所述的一种手动圆筒类柔性对心抓手,其特征在于:所述底座(1)的外表面沿圆周方向等距固定有多个安装座(2),且安装座(2)上安装有固定螺栓。
技术总结
本技术涉及机械抓手技术领域,且公开了一种手动圆筒类柔性对心抓手,包括底座和固定在底座上的筒体,所述筒体内安装有螺杆和调节杆,所述调节杆的一端通过啮合组件与螺杆连接;所述螺杆的上部安装有拉动组件,所述筒体的上部安装有多个与拉动组件连接的滑块,所述滑块的顶部固定有转筒,所述转筒上转动安装有伸缩部件,所述伸缩部件的一端安装有夹持板,本技术的转筒和伸缩部件采用转动方式连接,从而伸缩部件能够带动夹持板进行一百八十度旋转,从而能够改变夹持板与筒体圆心的距离,从而通过多个夹持板配合的情况下能够对较大的工件进行夹持。
技术研发人员:宋锋涛,张书栋,叶世启
受保护的技术使用者:河南亚拓智能科技有限公司
技术研发日:20231108
技术公布日:2024/5/19
- 还没有人留言评论。精彩留言会获得点赞!