一种上下料桁架机械手
本技术涉及机械手,具体的讲是一种上下料桁架机械手。
背景技术:
1、桁架机械手是一种建立在直角x,y,z三坐标系统基础上,对工件进行工位调整,或实现工件的轨迹运动等功能的全自动工业设备,其控制核心通过工业控制器实现,通过控制器对各种输入信号的分析处理,做出一定的逻辑判断后,对各个输出元件下达执行命令,完成x,y,z三轴之间的联合运动,以此实现一整套的全自动作业流程。
2、现有技术中的桁架机械手通常仅能进行垂直抓取,无法根据实际生产需要调整抓取角度,能够变换角度抓取的桁架机械手需要和生产线一起配套定制,工作环境较为单一。
技术实现思路
1、本实用新型要解决的技术问题是针对以上不足,提供一种上下料桁架机械手。
2、为解决以上技术问题,本实用新型采用以下技术方案:
3、一种上下料桁架机械手,包括桁架、平移机构、升降机构、角度调节机构和吸盘抓取机构,所述桁架的横梁后侧设置有安装板,所述安装板上设置有能在横梁上水平移动的平移机构,所述平移机构的输出端与横梁活动连接,所述安装板上设置有用于带动角度调节机构整体上下移动的升降机构,所述升降机构的输出端处设置有位于安装板后侧的竖梁,所述竖梁底端固定设置有角度调节机构,所述角度调节机构的底端铰接有用于抓取目标物质的吸盘抓取机构,所述角度调节机构用于调节吸盘抓取机构的转动角度;
4、所述角度调节机构包括固定支撑臂、活动连接臂、活动支撑臂、扭矩电机、第一伸缩杆和第二伸缩杆,所述角度调节机构的固定支撑臂的前侧水平固定设置有固定支撑架,所述固定支撑架的横梁底部固定设置有另一端延伸至角度调节机构的活动连接臂顶部的第一伸缩杆,所述第一伸缩杆用于通过伸缩带动活动连接臂与固定支撑臂的夹角,所述固定支撑臂的左右两侧均设置有另一端延伸至角度调节机构的活动支撑臂左右两侧的第二伸缩杆,所述第二伸缩杆用于通过伸缩调整活动支撑臂与固定支撑臂的转动幅度,所述扭矩电机用于带动吸盘抓取机构在水平面上旋转。
5、进一步的,所述平移机构和升降机构均包括齿轮齿条驱动机构和滚轮导向机构,所述升降机构和平移机构中齿轮齿条驱动机构的驱动电机分别位于安装板的前后两侧。
6、进一步的,所述竖梁的底端竖向固定设置有固定支撑臂,所述固定支撑臂的底端铰接有活动连接臂,所述活动连接臂的前端铰接有活动支撑臂,所述活动支撑臂的底端固定设置有扭矩电机,所述扭矩电机的输出端朝下设置,所述吸盘抓取机构与扭矩电机的输出端固定连接。
7、进一步的,所述吸盘抓取机构包括连接座、连接板、吸盘架和吸盘,所述连接座与扭矩电机的输出端固定连接,所述连接座底部固定连接有连接板,所述连接板的底部固定连接有吸盘架,所述吸盘架上呈阵列设置有多个吸盘,所述吸盘顶部通过气管与外部气泵相连通。
8、进一步的,所述固定支撑架的前侧设置有用于存放维修工具的储物箱。
9、本实用新型采用以上技术方案后,与现有技术相比,具有以下优点:
10、本实用新型通过设置第一伸缩杆、第二伸缩杆和角度调节装置,通过第一伸缩杆控制活动连接臂的转动角度,再通过第二伸缩杆控制活动支撑臂的转动角度,第一伸缩杆和第二伸缩杆配合使用,能使活动连接臂配合活动支撑臂在一定范围内前后转动,使吸盘抓取机构能够前后转动,再配合扭矩电机带动吸盘抓取机构水平转动,吸盘抓取机构能在水平、竖直方向调节角度,调节范围广,便于适应多种作业环境,通过设置储物箱,储存小型维修和保养工具,便于作业人员日常维修保养桁架机械手。
11、下面结合附图和实施例对本实用新型进行详细说明。
技术特征:
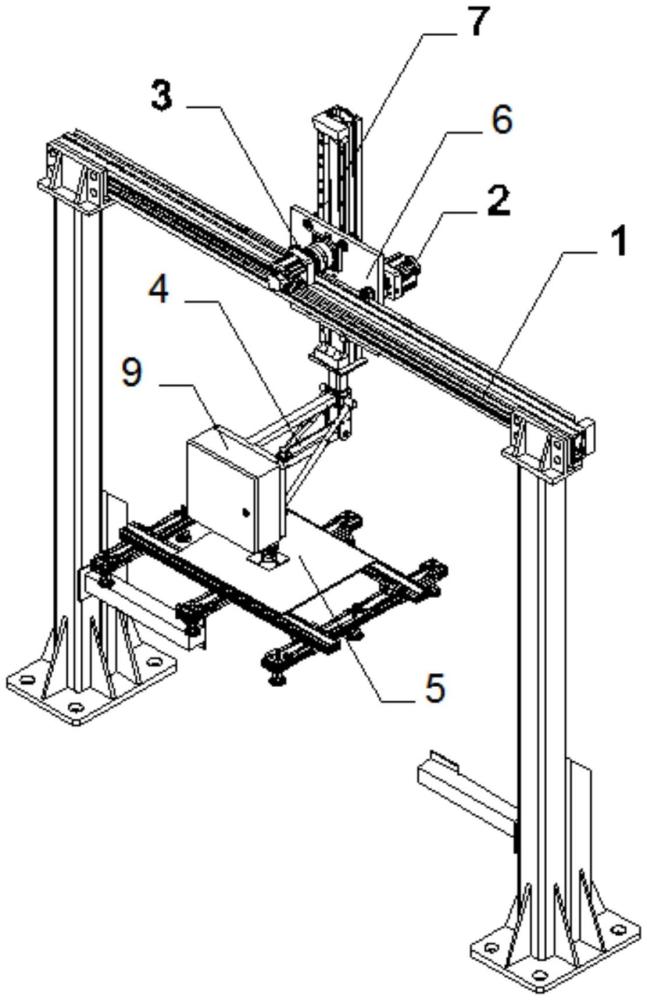
1.一种上下料桁架机械手,其特征在于,包括桁架(1)、平移机构(2)、升降机构(3)、角度调节机构(4)和吸盘抓取机构(5),所述桁架(1)的横梁后侧设置有安装板(6),所述安装板(6)上设置有能在横梁上水平移动的平移机构(2),所述平移机构(2)的输出端与横梁活动连接,所述安装板(6)上还设置有用于带动角度调节机构(4)整体上下移动的升降机构(3),所述升降机构(3)的输出端处设置有位于安装板(6)后侧的竖梁(7),所述竖梁(7)底端固定设置有角度调节机构(4),所述角度调节机构(4)的底端铰接有用于抓取目标物质的吸盘抓取机构(5),所述角度调节机构(4)用于调节吸盘抓取机构(5)的转动角度;
2.根据权利要求1所述的一种上下料桁架机械手,其特征在于,所述平移机构(2)和升降机构(3)均包括齿轮齿条驱动机构和滚轮导向机构,所述升降机构(3)和平移机构(2)中齿轮齿条驱动机构的驱动电机分别位于安装板(6)的前后两侧。
3.根据权利要求1所述的一种上下料桁架机械手,其特征在于,所述竖梁(7)的底端竖向固定设置有固定支撑臂(401),所述固定支撑臂(401)的底端铰接有活动连接臂(402),所述活动连接臂(402)的前端铰接有活动支撑臂(403),所述活动支撑臂(403)的底端固定设置有扭矩电机(404),所述扭矩电机(404)的输出端朝下设置,所述吸盘抓取机构(5)与扭矩电机(404)的输出端固定连接。
4.根据权利要求3所述的一种上下料桁架机械手,其特征在于,所述吸盘抓取机构(5)包括连接座(501)、连接板(502)、吸盘架(503)和吸盘(504),所述连接座(501)与扭矩电机(404)的输出端固定连接,所述连接座(501)底部固定连接有连接板(502),所述连接板(502)的底部固定连接有吸盘架(503),所述吸盘架(503)上呈阵列设置有多个吸盘(504),所述吸盘(504)顶部通过气管与外部气泵相连通。
5.根据权利要求1所述的一种上下料桁架机械手,其特征在于,所述固定支撑架(8)的前侧设置有用于存放维修工具的储物箱(9)。
技术总结
本实用新涉及一种上下料桁架机械手,包括桁架、平移机构、升降机构、角度调节机构和吸盘抓取机构,所述桁架的横梁后侧设置有安装板,所述安装板上设置有用于带动升降机构在横梁上水平移动的平移机构,所述平移机构的输出端与横梁活动连接,所述安装板上设置有用于带动角度调节机构整体上下移动的升降机构,所述升降机构的输出端处设置有位于安装板后侧的竖梁,所述竖梁底端固定设置有角度调节机构,所述角度调节机构的底端铰接有用于抓取目标物质的吸盘抓取机构,所述角度调节机构用于调节吸盘抓取机构的转动角度;本技术吸盘抓取机构水平、竖直方向角度调节范围广,便于适应多种作业环境。
技术研发人员:赵洪伟,程周,张紫弘
受保护的技术使用者:武汉纺织大学
技术研发日:20231112
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!