一种演示机器人生产用关节加工工装的制作方法
本技术涉及演示机器人关节加工,具体为一种演示机器人生产用关节加工工装。
背景技术:
1、智能机器人是从工业机器人发展而来的,最初的机器人是辅助人们解决一些工作事宜,随着科技水平,尤其是电脑技术和各种传感器的智能化、小型化的发展,人们将之安装在机器人上以提升其“自我”意识随之成为智能机器人,随着社会发展的需要和机器人应用领域的扩大,人们对智能机器人的要求也越来越高,由此智能机器人发展出各种型号种类,如农业机器人,陪护机器人和演示机器人等等,
2、机器人关节作为演示机器人的重要部件,极大的影响着演示机器人的整个性能,但如何设计一款方便使用的工装来进行加工机器人关节,在该行业也是重点,现在的加工工装不利于对机器人关节正反面进行固定,且固定效果不佳,加工过程中容易造成机器人关节出现移动的情况,鉴于此,一种演示机器人生产用关节加工工装。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种演示机器人生产用关节加工工装,解决了现在的加工工装不利于对机器人关节正反面进行固定,且固定效果不佳,加工过程中容易造成机器人关节出现移动情况的问题。
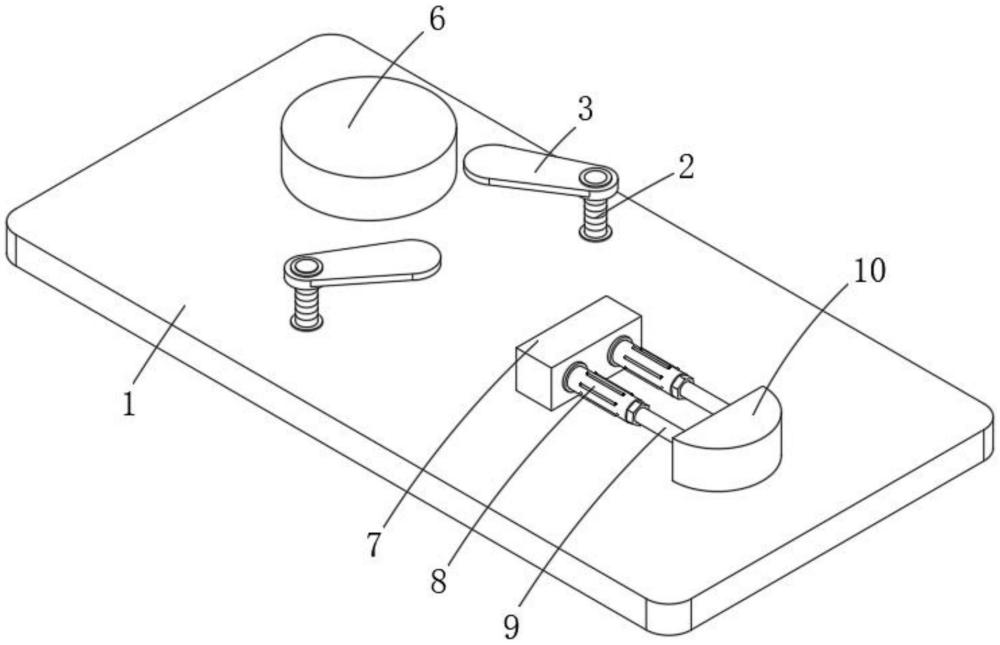
2、为解决上述的技术问题,本实用新型提供如下技术方案:一种演示机器人生产用关节加工工装,包括支板,所述支板上的两侧嵌设有第一螺纹套管,所述第一螺纹套管的内部螺纹连接有螺纹杆,所述螺纹杆的顶部转动套设有压板,所述压板的底部抵接在机器人关节的顶部,所述螺纹杆的底部穿过第一螺纹套管并延伸至支板的底部,所述螺纹杆的底部固定连接有手轮。
3、优选地,所述螺纹杆的外表面螺纹套设有锁母,所述锁母的顶部与支板的底部抵接。
4、优选地,所述支板顶部的一侧固定连接有定位柱,所述定位柱插接在机器人关节上的圆孔内。
5、优选地,所述机器人关节腰孔内壁的一侧抵接有定位块,所述定位块的侧面转动连接有第二螺纹套管,所述第二螺纹套管的内部螺纹插接有螺柱,所述螺柱的一端固定连接有抵块。
6、优选地,所述抵块的外侧抵接在机器人关节腰孔内壁的另一侧。
7、优选地,所述螺柱的外表面螺纹套设有第二锁母,所述第二锁母的一侧抵接在第二螺纹套管远离定位块的一侧。
8、优选地,所述第二螺纹套管的外表面呈圆周等距固定连接有防滑凸起。
9、借由上述技术方案,本实用新型提供了一种演示机器人生产用关节加工工装,至少具备以下有益效果:
10、1、该演示机器人生产用关节加工工装,将机器人关节放置在支板的顶部,通过旋转手轮可使得螺纹杆转动,在第一螺纹套管的限定下,可使得压板向下移动,压板的底部抵接在机器人关节的顶部,保证了机器人关节固定的稳定性,且便于对机器人关节的正反面进行固定,方便对同时对机器人关节正反面进行加工。
11、2、该演示机器人生产用关节加工工装,将机器人关节放置在支板的顶部,机器人关节的圆孔对准定位柱上,机器人关节腰孔对准定位块和抵块上,旋转第二螺纹套管,可使得螺柱推动抵块移动,抵块外侧抵接在机器人关节腰孔内壁内,增强了对机器人关节固定效果,防止在加工过程中机器人关节出现移动的情况。
技术特征:
1.一种演示机器人生产用关节加工工装,包括支板(1),其特征在于:所述支板(1)上的两侧嵌设有第一螺纹套管,所述第一螺纹套管的内部螺纹连接有螺纹杆(2),所述螺纹杆(2)的顶部转动套设有压板(3),所述压板(3)的底部抵接在机器人关节(11)的顶部,所述螺纹杆(2)的底部穿过第一螺纹套管并延伸至支板(1)的底部,所述螺纹杆(2)的底部固定连接有手轮(4)。
2.根据权利要求1所述的演示机器人生产用关节加工工装,其特征在于:所述螺纹杆(2)的外表面螺纹套设有锁母(5),所述锁母(5)的顶部与支板(1)的底部抵接。
3.根据权利要求1所述的演示机器人生产用关节加工工装,其特征在于:所述支板(1)顶部的一侧固定连接有定位柱(6),所述定位柱(6)插接在机器人关节(11)上的圆孔内。
4.根据权利要求3所述的演示机器人生产用关节加工工装,其特征在于:所述机器人关节(11)腰孔内壁的一侧抵接有定位块(7),所述定位块(7)的侧面转动连接有第二螺纹套管(8),所述第二螺纹套管(8)的内部螺纹插接有螺柱(9),所述螺柱(9)的一端固定连接有抵块(10)。
5.根据权利要求4所述的演示机器人生产用关节加工工装,其特征在于:所述抵块(10)的外侧抵接在机器人关节(11)腰孔内壁的另一侧。
6.根据权利要求5所述的演示机器人生产用关节加工工装,其特征在于:所述螺柱(9)的外表面螺纹套设有第二锁母,所述第二锁母的一侧抵接在第二螺纹套管(8)远离定位块(7)的一侧。
7.根据权利要求6所述的演示机器人生产用关节加工工装,其特征在于:所述第二螺纹套管(8)的外表面呈圆周等距固定连接有防滑凸起。
技术总结
本技术涉及演示机器人关节加工技术领域,尤其涉及一种演示机器人生产用关节加工工装,包括支板,所述支板上的两侧嵌设有第一螺纹套管,所述第一螺纹套管的内部螺纹连接有螺纹杆,所述螺纹杆的顶部转动套设有压板,所述压板的底部抵接在机器人关节的顶部,所述螺纹杆的底部穿过第一螺纹套管并延伸至支板的底部,所述螺纹杆的底部固定连接有手轮。本技术将机器人关节放置在支板的顶部,通过旋转手轮可使得螺纹杆转动,在第一螺纹套管的限定下,可使得压板向下移动,压板的底部抵接在机器人关节的顶部,保证了机器人关节固定的稳定性,且便于对机器人关节的正反面进行固定,方便对同时对机器人关节正反面进行加工。
技术研发人员:高世龙
受保护的技术使用者:嘉兴长研智略教育科技有限公司
技术研发日:20231117
技术公布日:2024/8/27
- 还没有人留言评论。精彩留言会获得点赞!