一种基于机器人末端用柔性手爪的制作方法
本技术涉及机器人设计,具体为一种基于机器人末端用柔性手爪。
背景技术:
1、机器人手爪是指机器人末端夹持器,通常采用的手爪分为刚性手爪和柔性手爪,柔性手爪可以抓握多种形状、尺寸和材质的物体,手爪与被操作物体表面之间的贴合度更高,适用性更强,现有的机器人手爪的内部器械在长期磨损后,金属材料的结构会出现磨损,需要滴加润滑油为器件进行润滑,延长器件的使用时间,但目前在机器上很少设置可以直接起到润滑的部件,润滑必须对机器进行拆卸,润滑时拆卸与组装的工作量大,对操作人员的要求高,耗费的时间很长,导致润滑的工作效率较低,为此,本发明提供了一种基于机器人末端用柔性手爪。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种基于机器人末端用柔性手爪,解决了对机器人手爪的部件进行润滑促进运转时必须对机器进行拆卸,技术要求高,且工作量大时长较长,导致工作效率较低的问题。
2、为实现以上目的,本实用新型通过以下技术方案予以实现:一种基于机器人末端用柔性手爪,包括手爪和设备箱,所述设备箱的内部固定连接有润滑箱和夹持箱,所述设备箱的内部滑动连接有收集箱,所述润滑箱的内部设置有润滑机构,所述润滑机构中包含有恢复弹簧,所述润滑箱的表面滑动连接有按动块,所述按动块的表面固定连接有按动杆,所述润滑箱的内部转动连接有按动棘轮、中转齿轮、变速齿轮、端齿轮和换向齿轮,所述按动棘轮的内部固定连接有中转杆,所述变速齿轮的内部固定连接有中转轴,所述润滑箱的内部开设有储藏槽、灌装槽和圆槽,所述储藏槽的内部转动连接有转动块,所述转动块的内部固定连接有转动杆,所述转动块的表面固定连接有圆块,所述圆槽的表面固定连接有出油管,所述夹持箱的内部滑动连接有滑动喷头,所述夹持箱的内部转动连接有旋转块,所述旋转块的表面固定连接有旋转杆,所述旋转杆的表面滑动连接有同步带,所述夹持箱的内部设置有夹持机构。
3、优选的,所述夹持机构中包含有推动块,所述夹持箱的内部固定连接有气缸。
4、优选的,所述气缸的内部滑动连接有活塞杆,所述活塞杆的一端与推动块的一端固定连接,所述夹持箱的内部固定连接有滑动柱和固定柱。
5、优选的,所述滑动柱的表面套设有滑动弹簧,所述滑动柱的表面滑动连接有滑动块。
6、优选的,所述滑动块的表面固定连接有斜块,所述斜块的表面固定连接有夹持块。
7、优选的,所述夹持块的表面通过螺栓固定连接有柔性块,所述夹持箱的内部滑动连接有限位柱和限位块,所述限位块的表面固定连接有限位弹簧。
8、有益效果
9、本实用新型提供了一种基于机器人末端用柔性手爪。与现有技术相比具备以下有益效果:
10、(1)、该基于机器人末端用柔性手爪,通过在手爪的运作结构的表面设置了润滑机构,润滑机构由按动块带动运转,按动块的每次按动将会促使转动块和圆块旋转一周,促使储藏槽内部的润滑油在夹持机构的表面喷洒,且设置同步滑动的滑动喷头,促使润滑油均匀喷洒,将所有的结构都覆盖上润滑油,多余的润滑油将从栅格流到收集箱,避免润滑油堆积影响手爪工作,润滑机构的添加使机器的润滑无需复杂的拆卸组装,只需倒入润滑油,按动按动块即可实现,操作简单,润滑时同样不影响结构之间的传动与手爪的工作,有效提高工作效率。
11、(2)、该基于机器人末端用柔性手爪,通过在手爪的表面设置夹持机构,由气缸控制调整手爪可握物体的距离,通过简单地控制气缸中活塞杆的位置,即可实现抓握物体,结构简单,便于拆卸检修,同时在夹持块的表面通过螺栓固定连接柔性块,使柔性块与夹持块之间可以拆卸,便于柔性块磨损后的简单更换,延长手爪的使用寿命,在夹持箱内设置滑动的限位块,可以抓握各个角度的物体,不限于抓握手爪中心位置的物体,适用范围更广。
技术特征:
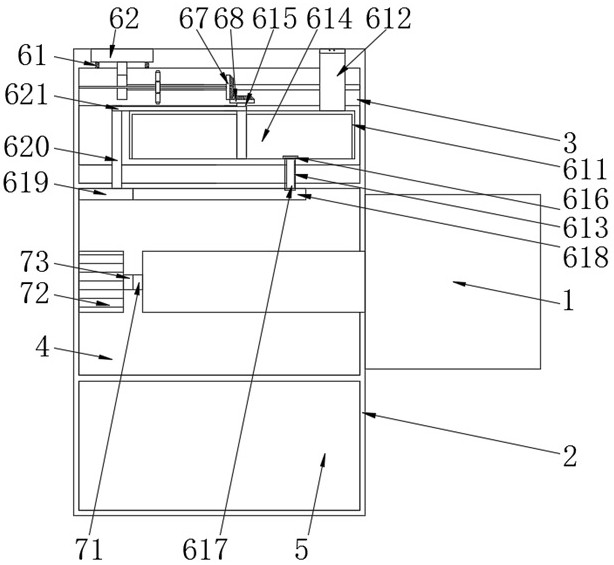
1.一种基于机器人末端用柔性手爪,包括手爪(1)和设备箱(2),所述设备箱(2)的内部固定连接有润滑箱(3)和夹持箱(4),所述设备箱(2)的内部滑动连接有收集箱(5),其特征在于:所述润滑箱(3)的内部设置有润滑机构(6),所述润滑机构(6)中包含有恢复弹簧(61),所述润滑箱(3)的表面滑动连接有按动块(62),所述按动块(62)的表面固定连接有按动杆(63),所述润滑箱(3)的内部转动连接有按动棘轮(64)、中转齿轮(65)、变速齿轮(66)、端齿轮(67)和换向齿轮(68),所述按动棘轮(64)的内部固定连接有中转杆(69),所述变速齿轮(66)的内部固定连接有中转轴(610),所述润滑箱(3)的内部开设有储藏槽(611)、灌装槽(612)和圆槽(613),所述储藏槽(611)的内部转动连接有转动块(614),所述转动块(614)的内部固定连接有转动杆(615),所述转动块(614)的表面固定连接有圆块(616),所述圆槽(613)的表面固定连接有出油管(617),所述夹持箱(4)的内部滑动连接有滑动喷头(618),所述夹持箱(4)的内部转动连接有旋转块(619),所述旋转块(619)的表面固定连接有旋转杆(620),所述旋转杆(620)的表面滑动连接有同步带(621),所述夹持箱(4)的内部设置有夹持机构(7)。
2.根据权利要求1所述的一种基于机器人末端用柔性手爪,其特征在于:所述夹持机构(7)中包含有推动块(71),所述夹持箱(4)的内部固定连接有气缸(72)。
3.根据权利要求2所述的一种基于机器人末端用柔性手爪,其特征在于:所述气缸(72)的内部滑动连接有活塞杆(73),所述活塞杆(73)的一端与推动块(71)的一端固定连接,所述夹持箱(4)的内部固定连接有滑动柱(74)和固定柱(75)。
4.根据权利要求3所述的一种基于机器人末端用柔性手爪,其特征在于:所述滑动柱(74)的表面套设有滑动弹簧(76),所述滑动柱(74)的表面滑动连接有滑动块(77)。
5.根据权利要求4所述的一种基于机器人末端用柔性手爪,其特征在于:所述滑动块(77)的表面固定连接有斜块(78),所述斜块(78)的表面固定连接有夹持块(79)。
6.根据权利要求5所述的一种基于机器人末端用柔性手爪,其特征在于:所述夹持块(79)的表面通过螺栓固定连接有柔性块(710),所述夹持箱(4)的内部滑动连接有限位柱(711)和限位块(712),所述限位块(712)的表面固定连接有限位弹簧(713)。
技术总结
本技术公开了一种基于机器人末端用柔性手爪,包括手爪和设备箱,本发明涉及机器人设计技术领域。该基于机器人末端用柔性手爪,在手爪的运作结构的表面设置了润滑机构,润滑机构由按动块带动运转,按动块的每次按动将会促使转动块和圆块旋转一周,促使储藏槽内部的润滑油在夹持机构的表面喷洒,且设置同步滑动的滑动喷头,促使润滑油均匀喷洒,将所有的结构都覆盖上润滑油,多余的润滑油将从栅格流到收集箱,避免润滑油堆积影响手爪工作,润滑机构的添加使机器的润滑无需复杂的拆卸组装,只需倒入润滑油,按动按动块即可实现,操作简单,润滑时同样不影响结构之间的传动与手爪的工作,有效提高工作效率。
技术研发人员:管仁明,朱靖,董远,刘嘉宏,朱嘉诚
受保护的技术使用者:高维智控机器人科技(苏州)有限公司
技术研发日:20231121
技术公布日:2024/8/15
- 还没有人留言评论。精彩留言会获得点赞!