一种夹持装置及机器人的制作方法
本申请涉及机械夹具,尤其涉及一种夹持装置及机器人。
背景技术:
1、为简化运输和尽可能降低被污染的风险,通常利用晶圆盒来储存和搬运晶圆。目前,通常使用夹持装置带动晶圆盒移动,以实现晶圆盒的转运。现有的夹持装置带动晶圆盒移动时,晶圆盒可能会因意外导致脱落,从而造成经济损失。
技术实现思路
1、为克服现有技术中的不足,本申请提供一种夹持装置及机器人。
2、本申请提供如下技术方案:
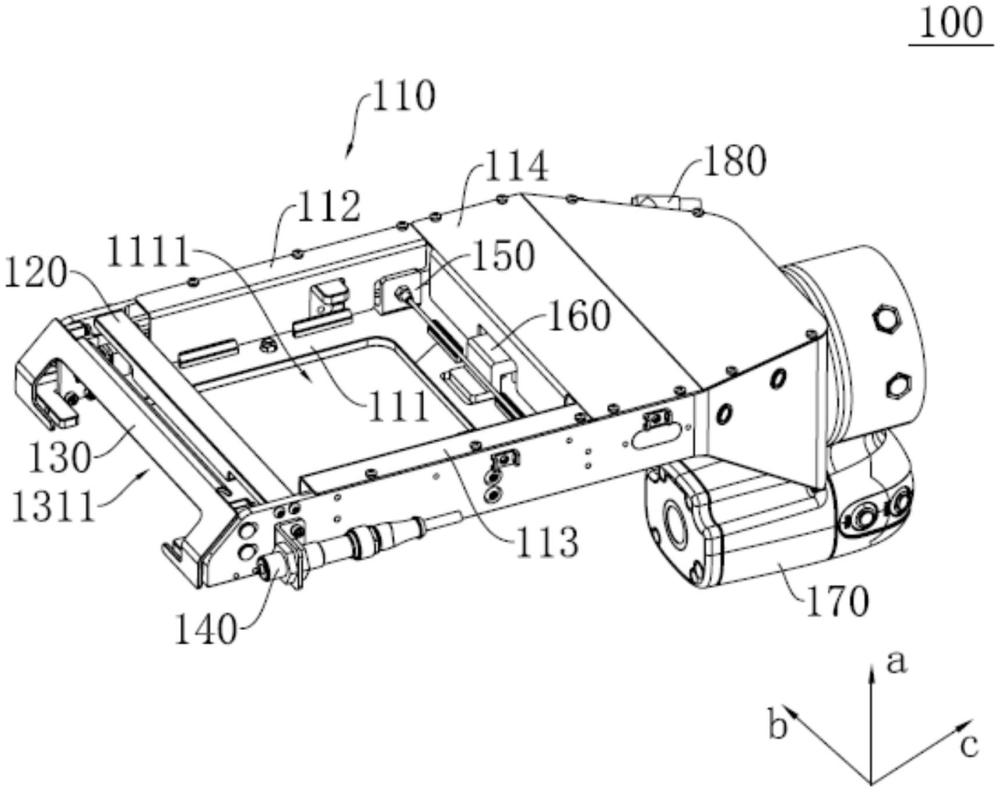
3、第一方面,本申请提供一种夹持装置,用于夹持晶圆盒,所述夹持装置包括:
4、夹具,内部具有容置空间;所述夹具上具有一侧开口的让位槽,所述让位槽与所述容置空间连通;所述让位槽用于让位所述晶圆盒上的连接块,以使所述晶圆盒上的装配板设置于所述容置空间内;
5、限位件,设置于所述容置空间内;所述限位件用于限制所述装配板在所述容置空间内沿第一方向的移动;
6、防脱件,包括本体和凸块;所述本体固定于所述夹具上,所述凸块凸出于所述本体的外表面;所述凸块位于所述容置空间内,且朝向所述让位槽的开口。
7、在一种可能的实施方式中,所述夹持装置还包括碰撞检测组件;所述碰撞检测组件包括防撞件、移动件及第一检测开关;所述防撞件设于所述夹具靠近所述让位槽开口的一端,并与所述夹具滑动配合;所述移动件的一端与所述防撞件连接;所述第一检测开关设于所述容置空间内,所述第一检测开关的检测头朝向所述移动件远离所述防撞件的一端。
8、在一种可能的实施方式中,所述碰撞检测组件还包括固定板和连接柱;所述固定板位于所述容置空间内,并固定于所述夹具侧板的内壁上;所述固定板上开设有第一移动槽,所述夹具的侧板上开设有与所述第一移动槽对称的第二移动槽;所述连接柱穿设于所述防撞件上,且所述连接柱的一端可移动地设于所述第一移动槽内,另一端可移动地设于所述第二移动槽内。
9、在一种可能的实施方式中,所述防撞件上开设有让位口,所述让位口与所述容置空间连通。
10、在一种可能的实施方式中,所述夹持装置还包括压力检测组件;所述压力检测组件包括压板和第二检测开关;所述压板可移动地设于所述容置空间内;所述压板在移动行程内,具有抵持所述第二检测开关的抵持状态,以及脱离所述第二检测开关的分离状态;所述压板上设有晶圆盒承载面。
11、在一种可能的实施方式中,所述压力检测组件还包括导向柱和弹簧;所述导向柱穿设于所述压板上,且所述导向柱与所述压板滑动配合;所述导向柱的一端固定于所述夹具的内壁上;所述弹簧套设于所述导向柱上,且所述弹簧的一端抵持于所述压板上,另一端抵持于所述夹具的内壁上。
12、在一种可能的实施方式中,所述夹持装置还包括第一传感器;所述第一传感器设于所述夹具的外侧;所述第一传感器的探测头朝向所述晶圆盒。
13、在一种可能的实施方式中,所述夹持装置还包括位置检测组件;所述位置检测组件包括第二传感器和第三传感器;所述第二传感器和所述第三传感器分别设于所述让位槽的两侧。
14、在一种可能的实施方式中,所述夹持装置还包括航插接头,所述航插接头设置于所述夹具上。
15、第二方面,本申请还提供了一种机器人,包括机械臂和上述夹持装置;所述机械臂的驱动端与所述夹具连接。
16、相比现有技术,本申请的有益效果:
17、本申请的夹持装置,通过在夹具上开设让位槽,让位槽能够在插取晶圆盒时让位晶圆盒上的连接块,以使晶圆盒上的装配板设置于容置空间内。通过在容置空间内设置限位件,限位件能够限制装配板在容置空间内沿第一方向的移动;以防止晶圆盒沿第一方向从容置空间内脱落。通过在夹具上设置防脱件,防脱件上的凸块能够防止晶圆盒从让位槽的开口处向外脱落。
18、为使本申请的上述目的、特征和优点能更明显和易懂,下文特举较佳实施例,并配合所附附图,做详细说明如下。
技术特征:
1.一种夹持装置,用于夹持晶圆盒,其特征在于,包括:
2.根据权利要求1所述的夹持装置,其特征在于,所述夹持装置还包括碰撞检测组件;所述碰撞检测组件包括防撞件、移动件及第一检测开关;所述防撞件设于所述夹具靠近所述让位槽开口的一端,并与所述夹具滑动配合;所述移动件的一端与所述防撞件连接;所述第一检测开关设于所述容置空间内,所述第一检测开关的检测头朝向所述移动件远离所述防撞件的一端。
3.根据权利要求2所述的夹持装置,其特征在于,所述碰撞检测组件还包括固定板和连接柱;所述固定板位于所述容置空间内,并固定于所述夹具侧板的内壁上;所述固定板上开设有第一移动槽,所述夹具的侧板上开设有与所述第一移动槽对称的第二移动槽;所述连接柱穿设于所述防撞件上,且所述连接柱的一端可移动地设于所述第一移动槽内,另一端可移动地设于所述第二移动槽内。
4.根据权利要求2所述的夹持装置,其特征在于,所述防撞件上开设有让位口,所述让位口与所述容置空间连通。
5.根据权利要求1-4中任意一项所述的夹持装置,其特征在于,所述夹持装置还包括压力检测组件;所述压力检测组件包括压板和第二检测开关;所述压板可移动地设于所述容置空间内;所述压板在移动行程内,具有抵持所述第二检测开关的抵持状态,以及脱离所述第二检测开关的分离状态;所述压板上设有晶圆盒承载面。
6.根据权利要求5所述的夹持装置,其特征在于,所述压力检测组件还包括导向柱和弹簧;所述导向柱穿设于所述压板上,且所述导向柱与所述压板滑动配合;所述导向柱的一端固定于所述夹具的内壁上;所述弹簧套设于所述导向柱上,且所述弹簧的一端抵持于所述压板上,另一端抵持于所述夹具的内壁上。
7.根据权利要求1-4中任意一项所述的夹持装置,其特征在于,所述夹持装置还包括第一传感器;所述第一传感器设于所述夹具的外侧;所述第一传感器的探测头朝向所述晶圆盒。
8.根据权利要求1-4中任意一项所述的夹持装置,其特征在于,所述夹持装置还包括位置检测组件;所述位置检测组件包括第二传感器和第三传感器;所述第二传感器和所述第三传感器分别设于所述让位槽的两侧。
9.根据权利要求1-4中任意一项所述的夹持装置,其特征在于,所述夹持装置还包括航插接头,所述航插接头设置于所述夹具上。
10.一种机器人,其特征在于,包括机械臂和权利要求1-9中任意一项所述的夹持装置;所述机械臂的驱动端与所述夹具连接。
技术总结
本申请提供了一种夹持装置及机器人,涉及机械夹具技术领域。夹持装置用于夹持晶圆盒,夹持装置包括夹具、限位件及防脱件;夹具的内部具有容置空间;夹具上具有一侧开口的让位槽,让位槽与容置空间连通;让位槽用于让位晶圆盒上的连接块,以使晶圆盒上的装配板设置于容置空间内;限位件设置于容置空间内;限位件用于限制装配板在容置空间内沿第一方向的移动;防脱件包括本体和凸块;本体固定于夹具上,凸块凸出于本体的外表面;凸块位于容置空间内,且朝向让位槽的开口。该机器人包括夹持装置。本申请的夹持装置能够防止晶圆盒脱落。
技术研发人员:李祥瑞
受保护的技术使用者:浙江欣奕华智能科技有限公司
技术研发日:20231121
技术公布日:2024/6/13
- 还没有人留言评论。精彩留言会获得点赞!