一种用于污染物采样仿生蛇形机器人
本技术涉及机器人,具体为一种用于污染物采样仿生蛇形机器人。
背景技术:
1、目前用于化工污染的机器人有多种类型和应用这些机器人可以在化工设备或管道发生泄漏时进行快速检测,及时报警并采取措施以阻止污染物进一步扩散,它们可能具备吸附、清扫、脱除沉积物等功能,以便安全有效地清除化学品残留物。这些机器人可以配备传感器和监测设备,用于监测化工厂周围环境中的污染物浓度和空气质量等指标,它们可以提供实时数据,并有助于保护工作人员和附近居民的健康。
2、目前,现今用于化工污染的机器人普遍存在以下缺点:机器人需要消耗大量的能量来移动和操作,研发和制造成本较高,难以普及和推广,需要进一步降低成本,本实用新型采用电机驱动,结构简单,更易于研发,且生产成本低廉,更易推广,且当前的蛇形机器人通常采用轮式或履带式结构,其移动能力受到地形障碍的限制。在污染物松软地面地形下,该形式机器人容易陷入土中可能无法正常行驶或达到所需的采样位置。
3、针对以上问题,为此提出了一种用于污染物采样仿生蛇形机器人。
技术实现思路
1、本实用新型的目的在于提供一种用于污染物采样仿生蛇形机器人,采用本装置进行工作,从而解决了上述背景中机器人需要消耗大量的能量来移动和操作,研发和制造成本较高,难以普及和推广,需要进一步降低成本,本实用新型采用电机驱动,结构简单,更易于研发,且生产成本低廉,更易推广,且当前的蛇形机器人通常采用轮式或履带式结构,其移动能力受到地形障碍的限制。在污染物松软地面地形下,该形式机器人容易陷入土中可能无法正常行驶或达到所需的采样位置的问题。
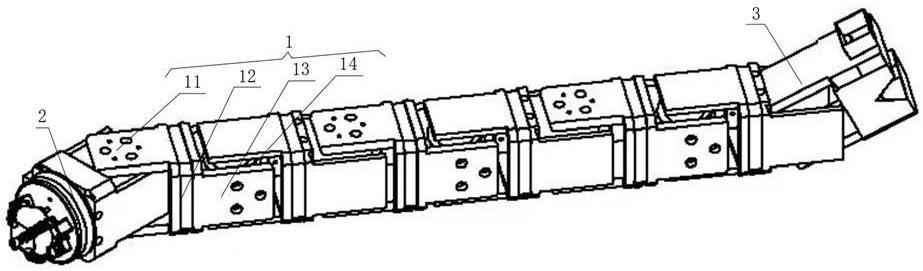
2、为实现上述目的,本实用新型提供如下技术方案:一种用于污染物采样仿生蛇形机器人,包括蛇身组件,所述蛇身组件的一端设置有蛇首组件,蛇身组件的另一端设置有蛇尾组件,通过蛇首组件、蛇身组件和蛇尾组件的组合设置形成一个完整的仿生蛇形机器人,蛇首组件的设置用于完成污染物样本采集任务,通过蛇尾组件的设置用于环境感知和避障,通过蛇身组件的设置用于带动整体进行移动。
3、进一步地,所述蛇身组件包括对接机构和螺纹固定安装在对接机构一端的稳定机构,稳定机构的一端螺纹固定安装有连接机构,连接机构的内腔中设置有驱动机构。
4、进一步地,所述对接机构包括开口夹块和设置在开口夹块内壁上下两端中部的卡嵌圆盘。
5、进一步地,所述稳定机构包括环形框架和呈线性等间距固定安装在环形框架外壁一端的若干仿冰刀结构。
6、进一步地,所述蛇首组件包括金属轴承和绕在金属轴承上的一组腱绳,腱绳末端绕在第二电机上。
7、进一步地,所述第二电机驱动腱绳带动机械手爪进行运动,机械手爪四指包含一层由橡胶制成的仿生脚蹼。
8、与现有技术相比,本实用新型的有益效果如下:蛇首组件的一组特殊仿脚蹼机械手爪实现了高效的样本采集和密封保存,蛇身组件的仿冰刀结构模仿了自然界中蛇的皮肤摩擦各向异性的特点,使机器人具备平顺且高效的移动能力,且蛇身组件模块化设计的躯干部分提供了灵活性和易维护性,蛇尾组件的尾部摄像头实现了精准定位和环境感知,促进任务的成功完成,本实用新型设计的装置,制造方便,成本低廉,有效降低制造成本。
技术特征:
1.一种用于污染物采样仿生蛇形机器人,包括蛇身组件(1),其特征在于:所述蛇身组件(1)的一端设置有蛇首组件(2),蛇身组件(1)的另一端设置有蛇尾组件(3),通过蛇首组件(2)、蛇身组件(1)和蛇尾组件(3)的组合设置形成一个完整的仿生蛇形机器人,蛇首组件(2)的设置用于完成污染物样本采集任务,通过蛇尾组件(3)的设置用于环境感知和避障,通过蛇身组件(1)的设置用于带动整体进行移动。
2.根据权利要求1所述的一种用于污染物采样仿生蛇形机器人,其特征在于:所述蛇身组件(1)包括对接机构(11)和螺纹固定安装在对接机构(11)一端的稳定机构(12),稳定机构(12)的一端螺纹固定安装有连接机构(13),连接机构(13)的内腔中设置有驱动机构(14)。
3.根据权利要求2所述的一种用于污染物采样仿生蛇形机器人,其特征在于:所述对接机构(11)包括开口夹块(111)和设置在开口夹块(111)内壁上下两端中部的卡嵌圆盘(112)。
4.根据权利要求3所述的一种用于污染物采样仿生蛇形机器人,其特征在于:所述稳定机构(12)包括环形框架(121)和呈线性等间距固定安装在环形框架(121)外壁一端的若干仿冰刀结构(122)。
5.根据权利要求4所述的一种用于污染物采样仿生蛇形机器人,其特征在于:所述蛇首组件(2)包括金属轴承(21)和绕在金属轴承(21)上的一组腱绳,腱绳末端绕在第二电机(22)上。
6.根据权利要求5所述的一种用于污染物采样仿生蛇形机器人,其特征在于:所述第二电机(22)驱动腱绳带动机械手爪(23)进行运动,机械手爪(23)四指包含一层由橡胶制成的仿生脚蹼(24)。
技术总结
本技术公开了一种用于污染物采样仿生蛇形机器人,涉及机器人技术领域,包括蛇身组件,蛇身组件的一端设置有蛇首组件,蛇身组件的另一端设置有蛇尾组件,蛇首组件的一组特殊仿脚蹼机械手爪实现了高效的样本采集和密封保存,蛇身组件的仿冰刀结构模仿了自然界中蛇的皮肤摩擦各向异性的特点,使机器人具备平顺且高效的移动能力,且蛇身组件模块化设计的躯干部分提供了灵活性和易维护性,蛇尾组件的尾部摄像头实现了精准定位和环境感知,促进任务的成功完成,本技术设计的装置,制造方便,成本低廉,有效降低制造成本。
技术研发人员:周云虎,车泽瑞,杨婧雯,万家豪,袁诚,刘越
受保护的技术使用者:安徽大学
技术研发日:20231124
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!