一种低压机器人的升降装置的制作方法
本技术涉及机器人,具体为一种低压机器人的升降装置。
背景技术:
1、低压开关柜适用于发电厂、石油、化工、冶金、纺织、高层建筑等行业,作为输电、配电及电能转换之用;现有的低压开关柜一般由柜体、抽屉框架、抽屉单元等部件构成,起到输电、配电及电能转换的作用;每个抽屉单元上都设置有一个转换开关,转换开关经过按压后才能进行转换;转换开关的手柄通过水平位置和竖直位置的变换来控制分合闸操作,从而使对应的设备停送电。
2、随着科学技术的不断进步,为了增加工作人员的安全保障,目前一般通过低压机器人对低压开关柜等配电设备进行停断电的自动作业,通过低压机器人上可以升降的机械爪对低压开关柜进行停送电操控,但是目前现有的低压机器人一般都是通过多节机械臂旋转来调节升降高度,旋转机械臂所需要的活动空间范围较大,不便于在较为窄小的空间内调节升降,同时因为机械爪的存在该机器人的整体占地空间较大,且整体不够美观。
技术实现思路
1、本实用新型的目的在于提供一种低压机器人的升降装置,以解决上述背景技术中提出的问题。
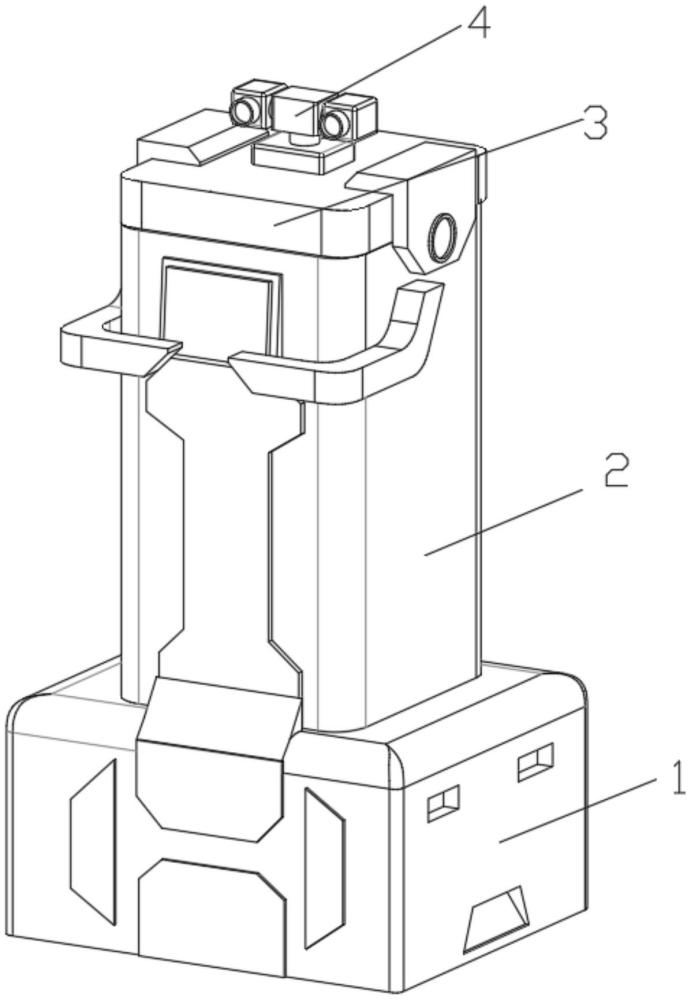
2、为实现上述目的,本实用新型提供如下技术方案:一种低压机器人的升降装置,包括底座,所述底座的顶部固定有机体,所述机体的顶端设置有顶板,所述顶板的表面通过旋转电机可旋转连接有摄像头,所述机体的内底壁固定有第一驱动电机,所述第一驱动电机的驱动端固定连接有螺纹杆,所述螺纹杆的外表面螺纹套接有升降立柱,所述升降立柱的顶端与顶板固定,所述升降立柱的表面固定有两个侧板,两个所述侧板之间设置有旋转机构,所述旋转机构上安装有机械爪,所述底座的下表面四角均设置有移动组件。
3、优选的,所述旋转机构包括固定在任一侧板上的第三驱动电机,所述第三驱动电机的驱动端固定有转杆,所述转杆的一端与另一侧板的表面转动连接,所述转杆的外表面固定连接有两个固定板,所述机械爪位于两个固定板之间。
4、优选的,所述机械爪包括两个伸缩缸和两个夹板,两个所述伸缩缸分别固定在两个夹板的两侧,两个所述夹板分别固定在两个伸缩缸的伸缩端。
5、优选的,所述移动组件包括固定在底座下表面的支架,所述支架的一端固定有第二驱动电机,所述第二驱动电机的伸缩端延伸至支架的一侧并固定有移动轮,所述底座的内部固定有转向电机,所述转向电机与移动组件连接。
6、优选的,所述底座的内部设置有蓄电池和控制芯片,所述底座的侧壁上设置有充电口。
7、优选的,所述机体的两对称内侧壁均开设有滑槽,所述滑槽与升降立柱的两侧壁滑动连接。
8、与现有技术相比,本实用新型的有益效果是:
9、本实用新型通过驱动电机、螺纹杆和升降立柱的设置,能够使机器人带动机械爪进行垂直升降,减小了升降时所需要的活动范围,同时通过旋转机构的设置,使得控制设备停送电的机械爪能够在不使用时,旋转并自动缩回至机体内部进行保护,使得该机器人整体占地空间较小,同时更为美观。
技术特征:
1.一种低压机器人的升降装置,包括底座(1),其特征在于:所述底座(1)的顶部固定有机体(2),所述机体(2)的顶端设置有顶板(3),所述顶板(3)的表面通过旋转电机可旋转连接有摄像头(4),所述机体(2)的内底壁固定有第一驱动电机(5),所述第一驱动电机(5)的驱动端固定连接有螺纹杆(6),所述螺纹杆(6)的外表面螺纹套接有升降立柱(7),所述升降立柱(7)的顶端与顶板(3)固定,所述升降立柱(7)的表面固定有两个侧板(8),两个所述侧板(8)之间设置有旋转机构,所述旋转机构上安装有机械爪,所述底座(1)的下表面四角均设置有移动组件。
2.根据权利要求1所述的一种低压机器人的升降装置,其特征在于:所述旋转机构包括固定在任一侧板(8)上的第三驱动电机(16),所述第三驱动电机(16)的驱动端固定有转杆(15),所述转杆(15)的一端与另一侧板(8)的表面转动连接,所述转杆(15)的外表面固定连接有两个固定板(12),所述机械爪位于两个固定板(12)之间。
3.根据权利要求2所述的一种低压机器人的升降装置,其特征在于:所述机械爪包括两个伸缩缸(13)和两个夹板(14),两个所述伸缩缸(13)分别固定在两个夹板(14)的两侧,两个所述夹板(14)分别固定在两个伸缩缸(13)的伸缩端。
4.根据权利要求1所述的一种低压机器人的升降装置,其特征在于:所述移动组件包括固定在底座(1)下表面的支架(10),所述支架(10)的一端固定有第二驱动电机(11),所述第二驱动电机(11)的伸缩端延伸至支架(10)的一侧并固定有移动轮(9),所述底座(1)的内部固定有转向电机,所述转向电机与移动组件连接。
5.根据权利要求1所述的一种低压机器人的升降装置,其特征在于:所述底座(1)的内部设置有蓄电池和控制芯片,所述底座(1)的侧壁上设置有充电口。
6.根据权利要求1所述的一种低压机器人的升降装置,其特征在于:所述机体(2)的两对称内侧壁均开设有滑槽(17),所述滑槽(17)与升降立柱(7)的两侧壁滑动连接。
技术总结
本技术涉及机器人技术领域,具体为一种低压机器人的升降装置,包括底座,所述底座的顶部固定有机体,所述机体的顶端设置有顶板,所述顶板的表面通过旋转电机可旋转连接有摄像头,所述机体的内底壁固定有第一驱动电机,所述第一驱动电机的驱动端固定连接有螺纹杆,所述螺纹杆的外表面螺纹套接有升降立柱。本技术通过驱动电机、螺纹杆和升降立柱的设置,能够使机器人带动机械爪进行垂直升降,减小了升降时所需要的活动范围,同时通过旋转机构的设置,使得控制设备停送电的机械爪能够在不使用时,旋转并自动缩回至机体内部进行保护,使得该机器人整体占地空间较小,同时更为美观。
技术研发人员:冀盛全,张志文,宋文清,李银广
受保护的技术使用者:国能北电胜利能源有限公司
技术研发日:20231124
技术公布日:2024/6/23
- 还没有人留言评论。精彩留言会获得点赞!