一种灌胶辅助机械手的制作方法
本技术涉及玻璃加工,尤其涉及灌胶辅助机械手。
背景技术:
1、玻璃是一种非晶体固体,能保持一定的形状,是由玻璃膏融液逐渐冷却,度逐渐增大而获得的物质。当今社会,玻璃已经普及到了人民的生活当中,随处都可以见到玻璃产品,同时夹胶玻璃同样属于玻璃制品中的一种,夹胶玻璃在加工时需要通过机械手辅助进行加工。
2、本发明人发现,现有的灌胶辅助机械手在使用时,大部分机械手在对玻璃进行夹持时无法带动玻璃进行翻转,容易导致玻璃在灌胶完成后玻璃内部的添加物堆积在一起覆盖不够全面,从而导致玻璃整体强度较低。
技术实现思路
1、本实用新型的目的在于提供一种灌胶辅助机械手,以解决上述背景技术中提出的大部分机械手在对玻璃进行夹持时无法带动玻璃进行翻转的问题。
2、本实用灌胶辅助机械手,由以下具体技术手段所达成:
3、一种灌胶辅助机械手,包括承载结构;所述承载结构的顶部固定连接有控制结构,承载结构上滑动连接有两组限位结构,控制结构同时与限位结构活动连接,承载结构的两侧分别固定连接有往复机构与限位机构,往复机构同时与限位机构活动连接,往复机构与夹持机构固定连接,往复机构包括:齿轮、连接轴、固定轴,齿轮固定连接在连接轴上,连接轴的一端同时与固定轴固定连接,连接轴同时固定连接有夹板a的一端。
4、进一步的,所述承载结构包括:底板、连接架、固定块、伸缩杆a、玻璃,底板的顶部固定连接有两组连接架,连接架的一侧同时固定连接有固定块,伸缩杆a分别固定连接在底板的两侧,固定块同时与玻璃活动连接。
5、进一步的,所述控制结构包括:支撑架、电动机a、锥齿轮a、锥齿轮b,支撑架固定连接在底板上,支撑架的顶部固定连接有电动机a,电动机a的一端固定连接有锥齿轮a,锥齿轮a同时与锥齿轮b相啮合。
6、进一步的,所述控制结构还包括:支撑块、控制轴a、限位板,支撑块呈两组设置,且两组支撑块分别固定连接在底板上,支撑块与控制轴a转动连接,控制轴a的两端分别固定连接有限位板。
7、进一步的,所述限位结构包括:连接板、固定架a、固定杆、螺纹槽、镂空槽、承载板,连接板的内部设有螺纹槽,连接板通过螺纹槽与控制轴a转动连接,固定架a分别固定连接在底板上,固定杆的两端分别与固定架a固定连接,固定杆同时与连接板滑动连接,连接板的一侧固定连接有承载板,连接板与承载板内设有镂空槽。
8、进一步的,所述往复机构还包括:连接框、齿条,连接框固定连接在底板上,连接框的一侧设有齿条,齿条同时与齿轮相啮合。
9、进一步的,所述夹持机构包括:夹板a、连接块、伸缩杆b、滑块,夹板a的顶部固定连接有连接块,夹板a、连接块分别与伸缩杆b固定连接,伸缩杆b的一端固定连接有滑块。
10、进一步的,所述夹持机构还包括:固定架b、电动机b、控制轴b、夹板b,固定架b固定连接在滑块的顶部,固定架b的底部固定连接有电动机b,电动机b的底部固定连接有控制轴b,控制轴b分别与滑块、夹板b转动连接,夹板b同时与滑块滑动连接,夹板a、夹板b分别贴合在玻璃的两侧。
11、进一步的,所述限位机构包括:固定板、滑动杆、搭接块、弹性件,固定板固定连接在伸缩杆a的顶部,固定板上滑动连接有滑动杆,滑动杆上固定连接有搭接块,滑动杆上同时活动连接有弹性件,弹性件的两端分别与固定板、搭接块相贴合。
12、进一步的,所述限位机构还包括:连接柱、预留槽、搭接板,连接柱同时与固定板固定连接,连接柱的内部设有预留槽,连接柱通过预留槽分别与连接轴、固定轴转动连接,搭接板固定连接在滑动杆的底部,搭接板通过预留槽与连接柱活动连接,搭接板同时贴合在固定轴的一侧。
13、与现有结构相较之下,本实用新型具有如下优点:
14、1.本实用新型夹持机构的设置,通过电动机b与伸缩杆b可以控制夹板b进行伸缩与升降,同时通过夹板a与夹板b可以有效的从两端对玻璃进行夹持与固定,固定方式较为简易且固定效果牢靠,可以有效的避免通过夹板a与夹板b携带玻璃升降与翻转时,导致玻璃脱离出夹板a与夹板b的内部。
15、2.本实用新型往复机构的设置,通过伸缩杆a控制夹板a进行升降时,可以通过齿轮与齿条控制夹板a进行翻转,同时玻璃在翻转后便于在不同角度对玻璃进行加工时,还可以避免玻璃内注入的材料堆积在一起,可以有效的控制玻璃内的材料均匀的覆盖在玻璃上,提高玻璃加工的质量。
16、3.本实用新型限位机构的设置,通过弹性件可以控制搭接板良好的贴合到固定轴上,同时通过搭接板还可以有效的对固定轴进行限位,防止固定轴与连接轴在经过齿轮后受到重量的影响自动发生转动的情况发生,同时控制方式还较为简易。
17、4.本实用新型限位机构的设置,通过固定块可以对玻璃承载,且当开启电动机a后还可以通过控制轴a带动连接板同时向内或向外进行滑动,并通过连接板控制玻璃居中,同时还可以对玻璃进行固定,进一步的保证玻璃在多角度进行加工。
技术特征:
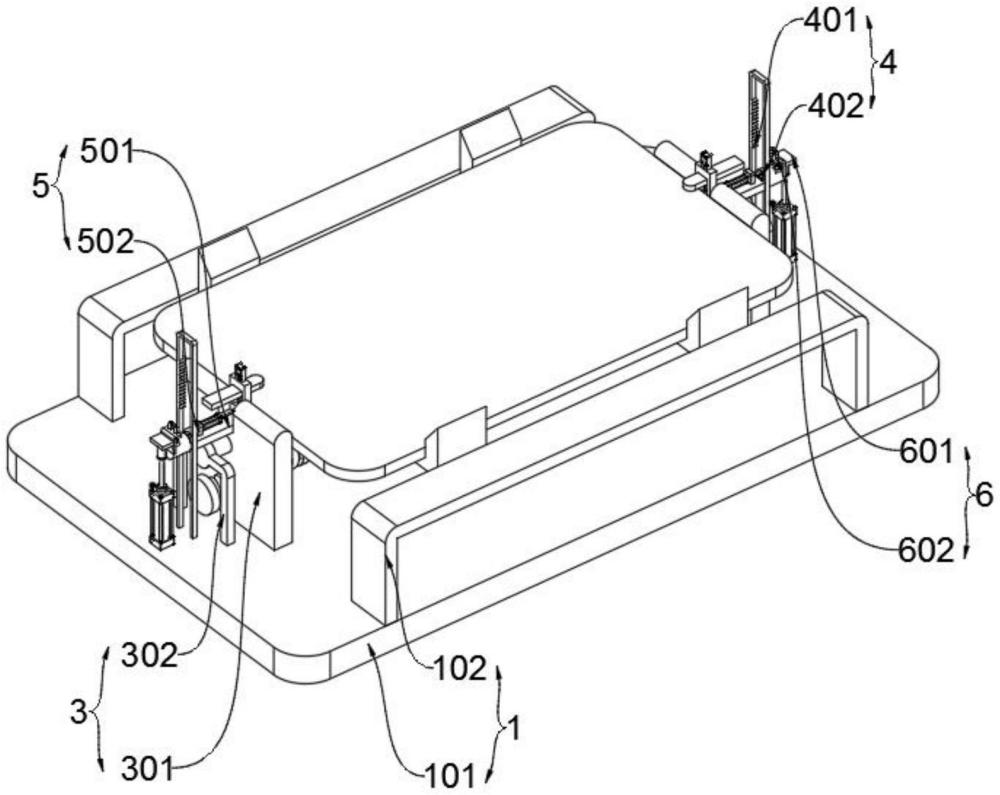
1.一种灌胶辅助机械手,其特征在于:包括承载结构(1);所述承载结构(1)的顶部固定连接有控制结构(2),承载结构(1)上滑动连接有两组限位结构(3),控制结构(2)同时与限位结构(3)活动连接,承载结构(1)的两侧分别固定连接有往复机构(4)与限位机构(6),往复机构(4)同时与限位机构(6)活动连接,往复机构(4)与夹持机构(5)固定连接,往复机构(4)包括:齿轮(402)、连接轴(403)、固定轴(404),齿轮(402)固定连接在连接轴(403)上,连接轴(403)的一端同时与固定轴(404)固定连接,连接轴(403)同时固定连接有夹板a(501)的一端。
2.根据权利要求1所述的一种灌胶辅助机械手,其特征在于:所述承载结构(1)包括:底板(101)、连接架(102)、固定块(103)、伸缩杆a(104)、玻璃(105),底板(101)的顶部固定连接有两组连接架(102),连接架(102)的一侧同时固定连接有固定块(103),伸缩杆a(104)分别固定连接在底板(101)的两侧,固定块(103)同时与玻璃(105)活动连接。
3.根据权利要求2所述的一种灌胶辅助机械手,其特征在于:所述控制结构(2)包括:支撑架(201)、电动机a(202)、锥齿轮a(203)、锥齿轮b(204),支撑架(201)固定连接在底板(101)上,支撑架(201)的顶部固定连接有电动机a(202),电动机a(202)的一端固定连接有锥齿轮a(203),锥齿轮a(203)同时与锥齿轮b(204)相啮合。
4.根据权利要求2所述的一种灌胶辅助机械手,其特征在于:所述控制结构(2)还包括:支撑块(205)、控制轴a(206)、限位板(207),支撑块(205)呈两组设置,且两组支撑块(205)分别固定连接在底板(101)上,支撑块(205)与控制轴a(206)转动连接,控制轴a(206)的两端分别固定连接有限位板(207)。
5.根据权利要求2所述的一种灌胶辅助机械手,其特征在于:所述限位结构(3)包括:连接板(301)、固定架a(302)、固定杆(303)、螺纹槽(304)、镂空槽(305)、承载板(306),连接板(301)的内部设有螺纹槽(304),连接板(301)通过螺纹槽(304)与控制轴a(206)转动连接,固定架a(302)分别固定连接在底板(101)上,固定杆(303)的两端分别与固定架a(302)固定连接,固定杆(303)同时与连接板(301)滑动连接,连接板(301)的一侧固定连接有承载板(306),连接板(301)与承载板(306)内设有镂空槽(305)。
6.根据权利要求2所述的一种灌胶辅助机械手,其特征在于:所述往复机构(4)还包括:连接框(401)、齿条(405),连接框(401)固定连接在底板(101)上,连接框(401)的一侧设有齿条(405),齿条(405)同时与齿轮(402)相啮合。
7.根据权利要求1所述的一种灌胶辅助机械手,其特征在于:所述夹持机构(5)包括:夹板a(501)、连接块(502)、伸缩杆b(503)、滑块(504),夹板a(501)的顶部固定连接有连接块(502),夹板a(501)、连接块(502)分别与伸缩杆b(503)固定连接,伸缩杆b(503)的一端固定连接有滑块(504)。
8.根据权利要求7所述的一种灌胶辅助机械手,其特征在于:所述夹持机构(5)还包括:固定架b(505)、电动机b(506)、控制轴b(507)、夹板b(508),固定架b(505)固定连接在滑块(504)的顶部,固定架b(505)的底部固定连接有电动机b(506),电动机b(506)的底部固定连接有控制轴b(507),控制轴b(507)分别与滑块(504)、夹板b(508)转动连接,夹板b(508)同时与滑块(504)滑动连接,夹板a(501)、夹板b(508)分别贴合在玻璃(105)的两侧。
9.根据权利要求2所述的一种灌胶辅助机械手,其特征在于:所述限位机构(6)包括:固定板(601)、滑动杆(602)、搭接块(603)、弹性件(604),固定板(601)固定连接在伸缩杆a(104)的顶部,固定板(601)上滑动连接有滑动杆(602),滑动杆(602)上固定连接有搭接块(603),滑动杆(602)上同时活动连接有弹性件(604),弹性件(604)的两端分别与固定板(601)、搭接块(603)相贴合。
10.根据权利要求9所述的一种灌胶辅助机械手,其特征在于:所述限位机构(6)还包括:连接柱(605)、预留槽(606)、搭接板(607),连接柱(605)同时与固定板(601)固定连接,连接柱(605)的内部设有预留槽(606),连接柱(605)通过预留槽(606)分别与连接轴(403)、固定轴(404)转动连接,搭接板(607)固定连接在滑动杆(602)的底部,搭接板(607)通过预留槽(606)与连接柱(605)活动连接,搭接板(607)同时贴合在固定轴(404)的一侧。
技术总结
本技术提供一种灌胶辅助机械手,涉及玻璃加工技术领域,以解决大部分机械手在对玻璃进行夹持时无法带动玻璃进行翻转的问题,包括承载结构;所述承载结构的顶部固定连接有控制结构,承载结构上滑动连接有两组限位结构,控制结构同时与限位结构活动连接,承载结构的两侧分别固定连接有往复机构与限位机构,往复机构同时与限位机构活动连接,往复机构与夹持机构固定连接,往复机构包括:齿轮、连接轴、固定轴,齿轮固定连接在连接轴上,连接轴的一端同时与固定轴固定连接,连接轴同时固定连接有夹板A的一端,通过齿轮与齿条控制夹板A进行翻转,同时玻璃在翻转后便于在不同角度对玻璃进行加工,还可以避免玻璃内注入的材料堆积在一起。
技术研发人员:陈高明
受保护的技术使用者:苏州益融达能源科技有限公司
技术研发日:20231128
技术公布日:2024/7/29
- 还没有人留言评论。精彩留言会获得点赞!