一种自锁型机器人夹具的制作方法
本技术属于机器人,具体为一种自锁型机器人夹具。
背景技术:
1、随着工业机器人技术的不断发展,工业机器人越来越多的被应用到不同领域,现有的机器人抓手大多依靠液压或者气压来提供抓取所需的动力,但是这样的方式在抓取时需要持续的对抓手提供压力,才能使其保持恒定的抓取力度,因此不满足市场的需求。
技术实现思路
1、本实用新型目的是提供一种自锁型机器人夹具。
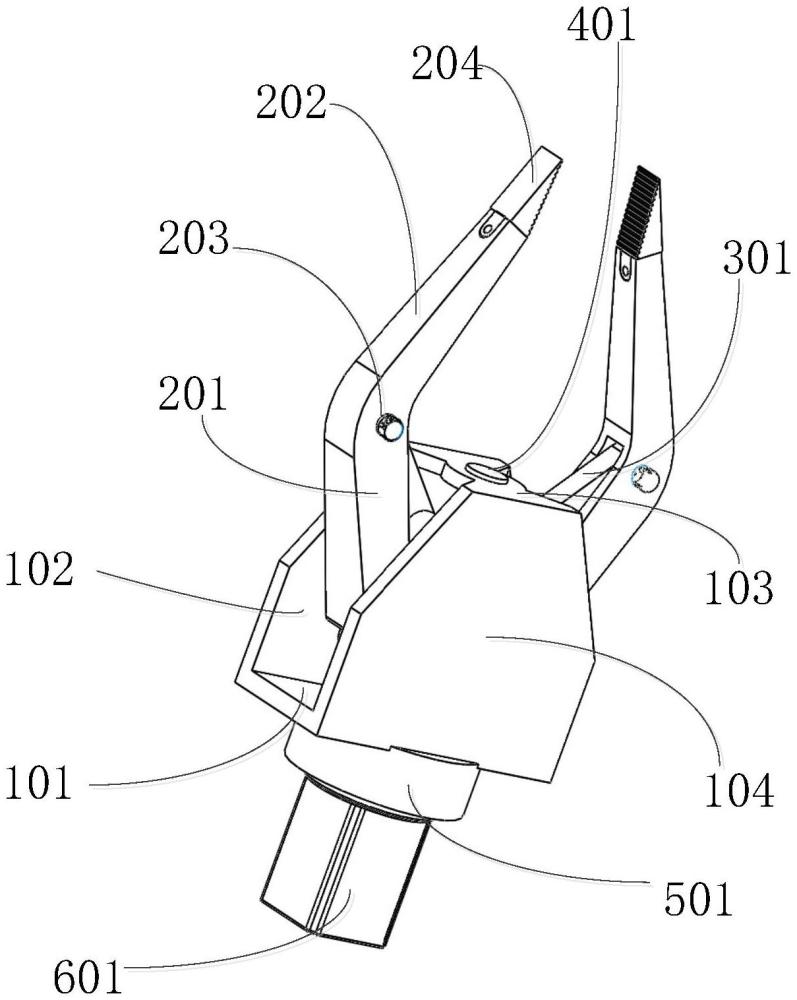
2、本实用新型提供的自锁型机器人夹具,包括基座、穿设在所述基座上的设有外螺纹(4011)的第一轴杆(401)和两结构相同的抓手;所述两抓手对称设置;两所述抓手均与所述第一轴杆(401)、基座均连接。
3、优选的,所述基座包括第一顶板(103)、第一底板(101)、第一侧板(102)和第二侧板(104);所述第一顶板(103)、第一侧板(102)、第一底板(101)和第二侧板(104)首尾相接成矩形结构;所述第一底板(101)开设有第一轴孔(1011);所述第一顶板(103)上开设有第二轴孔(1031);所述第一轴孔(1011)和第二轴孔(1031)同轴设置;所述第一轴杆(401)穿设所述第一轴孔(1011)和第二轴孔(1031)后和所述第一顶板(103)相转动连接。
4、优选的,所述第一底板(101)的顶部还固定有结构相同的第一弧形板(701)和第二弧形板(702);所述第一弧形板(701)和第二弧形板(702)相对设置围合成一第一空腔;所述第一轴杆(401)穿设所述第一空腔。
5、优选的,所述抓手包括第一连接件;所述第一连接件包括第一连接板(804);所述第一连接板(804)的底部设有与所述外螺纹(4011)相配合的内螺纹(8041);所述第一连接板(804)的两侧分别开设有第一凹槽(805)和第二凹槽(806);所述第一弧形板(701)的一端卡接在所述第一凹槽(805)内;所述第二弧形板(702)的一端卡接在所述第二凹槽(806)内。
6、优选的,所述第一连接件还包括第一铰接板(801)、第二铰接板(802)和第二底板(803);所述第一铰接板(801)和第二铰接板(802)固定在所述第一顶板(103)一侧面的两端;所述第一连接板(804)远离所述第一轴杆(401)的一端固定在所述第二底板(803)另一侧面的中间部位;所述第一铰接板(801)、第二铰接板(802)、第二底板(803)和第一连接板(804)为一体成形结构;所述第一铰接板(801)和第二铰接板(802)上均开设有第三轴孔(807);所述抓手还包括第一夹臂;所述第一夹臂的底部还固定有第二连接板(808);所述第二连接板(808)上开设有第四轴孔;两所述第三轴孔(807)和所述第四轴孔同轴设置;通过第二轴杆插入两所述第三轴孔(807)和第四轴孔后将所述第二连接板(808)和所述第一铰接板(801)、第二铰接板(802)转动连接。
7、优选的,所述抓手还包括第三连接板(301);所述第三连接板(301)的一端设有第五轴孔(图中未示出);所述第一夹臂包括第一臂体(201)和第二臂体(202);所述第一臂体(201)和第二臂体(202)首尾相接成一体成形的弧形结构;所述第二连接板(808)固定在所述第一臂体(201)的底部;所述第一臂体(201)远离所述第二连接板(808)的一端开设有第六轴孔(2012);通过第三轴杆(203)插入所述第五轴孔和第六轴孔(2012)后将所述第三连接板(301)和所述第一臂体(201)活动连接。
8、优选的,所述第三连接板(301)远离所述第五轴孔一端的两侧均固定第一轴体(图中未示出);所述第一侧板(102)和第二侧板(104)上均固定一同轴设置的第一环体(1041);两所述第一轴体分别卡接在两所述第一环体(1041)内。
9、优选的,所述第一臂体(201)的一侧还设有第三凹槽(2011);所述第三凹槽(2011)和所述第五轴孔相连通。
10、优选的,两所述抓手的第一臂体(201)的顶部还固定一防滑橡胶块(205)。
11、优选的,本实用新型所提供的自锁型机器人夹具,还包括一驱动电机(601)和电机座(501);所述电机座(501)固定在所述第一底板(101)的底部;所述驱动电机(601)固定在所述电机座(501)远离所述第一底板(101)的一侧;所述驱动电机(601)的执行端和所述第一轴杆(401)传动连接。
12、本实用新型所提供的自锁型机器人夹具,通过第一轴杆(401)的的转动,带动两抓手进行开合运动,通过第一轴杆(401)的转动角度即可控制两抓手的夹紧力度,且当第一轴杆(401)停止转动时,通过外螺纹的锁定,使两抓手也自锁在当前状态,无需外力即可保持抓手的抓取力度,结构简单且实用。
技术特征:
1.一种自锁型机器人夹具,其特征在于,包括基座、穿设在所述基座上的设有外螺纹(4011)的第一轴杆(401)和两结构相同的抓手;所述两抓手对称设置;两所述抓手均与所述第一轴杆(401)、基座均连接。
2.如权利要求1所述的自锁型机器人夹具,其特征在于,所述基座包括第一顶板(103)、第一底板(101)、第一侧板(102)和第二侧板(104);所述第一顶板(103)、第一侧板(102)、第一底板(101)和第二侧板(104)首尾相接成矩形结构;所述第一底板(101)开设有第一轴孔(1011);所述第一顶板(103)上开设有第二轴孔(1031);所述第一轴孔(1011)和第二轴孔(1031)同轴设置;所述第一轴杆(401)穿设所述第一轴孔(1011)和第二轴孔(1031)后和所述第一顶板(103)相转动连接。
3.如权利要求2所述的自锁型机器人夹具,其特征在于,所述第一底板(101)的顶部还固定有结构相同的第一弧形板(701)和第二弧形板(702);所述第一弧形板(701)和第二弧形板(702)相对设置围合成一第一空腔;所述第一轴杆(401)穿设所述第一空腔。
4.如权利要求3所述的自锁型机器人夹具,其特征在于,所述抓手包括第一连接件;所述第一连接件包括第一连接板(804);所述第一连接板(804)的底部设有与所述外螺纹(4011)相配合的内螺纹(8041);所述第一连接板(804)的两侧分别开设有第一凹槽(805)和第二凹槽(806);所述第一弧形板(701)的一端卡接在所述第一凹槽(805)内;所述第二弧形板(702)的一端卡接在所述第二凹槽(806)内。
5.如权利要求4所述的自锁型机器人夹具,其特征在于,所述第一连接件还包括第一铰接板(801)、第二铰接板(802)和第二底板(803);所述第一铰接板(801)和第二铰接板(802)固定在所述第一顶板(103)一侧面的两端;所述第一连接板(804)远离所述第一轴杆(401)的一端固定在所述第二底板(803)另一侧面的中间部位;所述第一铰接板(801)、第二铰接板(802)、第二底板(803)和第一连接板(804)为一体成形结构;所述第一铰接板(801)和第二铰接板(802)上均开设有第三轴孔(807);所述抓手还包括第一夹臂;所述第一夹臂的底部还固定有第二连接板(808);所述第二连接板(808)上开设有第四轴孔;两所述第三轴孔(807)和所述第四轴孔同轴设置;通过第二轴杆插入两所述第三轴孔(807)和第四轴孔后将所述第二连接板(808)和所述第一铰接板(801)、第二铰接板(802)转动连接。
6.如权利要求5所述的自锁型机器人夹具,其特征在于,所述抓手还包括第三连接板(301);所述第三连接板(301)的一端设有第五轴孔;所述第一夹臂包括第一臂体(201)和第二臂体(202);所述第一臂体(201)和第二臂体(202)首尾相接成一体成形的弧形结构;所述第二连接板(808)固定在所述第一臂体(201)的底部;所述第一臂体(201)远离所述第二连接板(808)的一端开设有第六轴孔(2012);通过第三轴杆(203)插入所述第五轴孔和第六轴孔(2012)后将所述第三连接板(301)和所述第一臂体(201)活动连接。
7.如权利要求6所述的自锁型机器人夹具,其特征在于,所述第三连接板(301)远离所述第五轴孔一端的两侧均固定第一轴体;所述第一侧板(102)和第二侧板(104)上均固定一同轴设置的第一环体(1041);两所述第一轴体分别卡接在两所述第一环体(1041)内。
8.如权利要求7所述的自锁型机器人夹具,其特征在于,所述第一臂体(201)的一侧还设有第三凹槽(2011);所述第三凹槽(2011)和所述第五轴孔相连通。
9.如权利要求8所述的自锁型机器人夹具,其特征在于,两所述抓手的第一臂体(201)的顶部还固定一防滑橡胶块(205)。
10.如权利要求9所述的自锁型机器人夹具,其特征在于,还包括一驱动电机(601)和电机座(501);所述电机座(501)固定在所述第一底板(101)的底部;所述驱动电机(601)固定在所述电机座(501)远离所述第一底板(101)的一侧;所述驱动电机(601)的执行端和所述第一轴杆(401)传动连接。
技术总结
本技术公开了一种自锁型机器人夹具,其特征在于,包括基座、穿设在所述基座上的设有外螺纹(4011)的第一轴杆(401)和两结构相同的抓手;所述两抓手对称设置;两所述抓手均与所述第一轴杆(401)、基座均连接。本技术所公开的自锁型机器人夹具,通过第一轴杆(401)的的转动,带动两抓手进行开合运动,通过第一轴杆(401)的转动角度即可控制两抓手的夹紧力度,且当第一轴杆(401)停止转动时,通过外螺纹的锁定,使两抓手也自锁在当前状态,无需外力即可保持抓手的抓取力度,结构简单且实用。
技术研发人员:陆军
受保护的技术使用者:上海杯特机械工程有限公司
技术研发日:20231127
技术公布日:2024/10/31
- 还没有人留言评论。精彩留言会获得点赞!