一种具有管道运输功能的管道安装机器人的制作方法
本技术涉及矿用车,尤其是涉及一种具有管道运输功能的管道安装机器人。
背景技术:
1、为满足煤矿井下煤炭开采的需要,井下巷道中布置有多种功能的管道,如:给排水管、通风管、瓦斯抽采管等,担负着撒水分防尘、工业排水、煤层注浆、通风、瓦斯抽采等功能。传统的管道安装方式主要为人工搬运,手拉葫芦起吊,临时搭建操作平台的方式。
2、现有技术中,如cn116728375a所述的一种煤矿管道安装机器人,包括机械臂、履带行走机构、安装平台和操作平台;安装平台设置在履带行走机构上方,机械臂底部设有回转台,回转台下方设有第一滑移机构,第一滑移机构设置在安装平台上;操作平台连接在安装平台上;在机械臂末端连接有夹持爪,夹持爪由两个对称的夹持件连接而成,夹持件形成用于夹持待安装管道的弧槽;夹持爪的连接端通过柔性头和螺旋式摆动油缸与机械臂末端连接;操作平台包括吊篮,及与吊篮连接的升降机构和第二滑移机构。
3、上述管道安装机器人,仅能用于管道的安装,无法将管道从管道存储平台运输到指定安装位置,若通过夹持爪夹持着管道运输,遇到颠簸路段易发生管道掉落现象,造成安全事故。
4、因此,有必要对现有技术中的管道安装机器人进行改进。
技术实现思路
1、本实用新型的目的在于克服现有技术中存在的缺陷,提供一种具有管道运输功能的管道安装机器人,通过设置放置台以及限位组件,管道安装机器人在运输管道时可以将管道夹持固定。
2、为实现上述技术效果,本实用新型的技术方案为:一种具有管道运输功能的管道安装机器人,包括:
3、机器人本体;
4、行驶组件,设置于所述机器人本体下方,用于驱动所述机器人本体移动;
5、抓取组件,与所述机器人本体相连,用于抓取、安装管道;
6、放置台,设置于所述机器人本体的上表面,用于运输时放置所述管道;
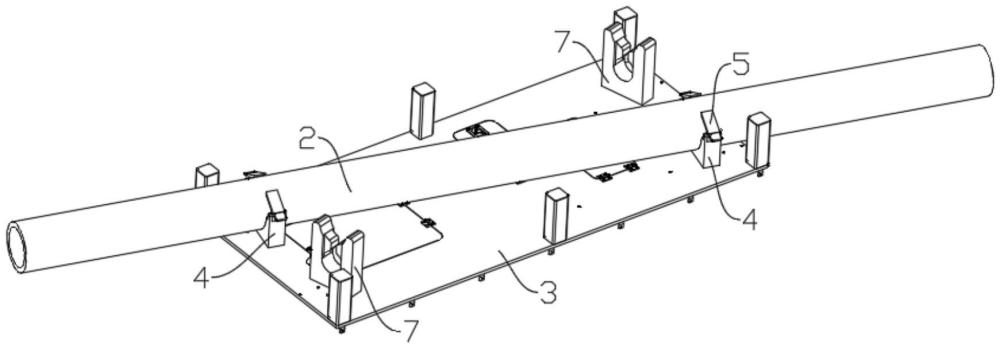
7、限位组件,与所述放置台相连设置,用于运输时固定所述放置台上的管道;包括第一限位基座,所述第一限位基座设置有与所述管道相限位配合的第一限位槽,所述第一限位基座设置有用于将所述管道固定于所述第一限位槽中的第一限位件。
8、优选的技术方案为,所述第一限位件包括设置于所述第一限位槽上方的第一限位板,所述第一限位板与所述第一限位基座转动连接,所述第一限位板的转动轴轴心线方向平行于所述第一限位槽的轴心线方向,所述第一限位板设置有与所述管道相抵接的限位部。
9、优选的技术方案为,所述第一限位板与所述第一限位基座之间设置有用于将所述限位部抵紧于所述管道外壁的第一弹性件。
10、优选的技术方案为,所述限位部设置有弧形抵接面。
11、优选的技术方案为,所述第一限位板固定设置有便于将其转动的按压板。
12、优选的技术方案为,所述第一限位基座设置有两个,两个所述第一限位基座分设于所述机器人本体的两端,两个所述第一限位基座上的第一限位槽的轴心线相重合设置。
13、优选的技术方案为,所述限位组件还包括第二限位基座,所述第二限位基座设置有与管道相限位配合的第二限位槽,所述第二限位槽的上方滑动设置有两个第二限位板,两个所述第二限位板同时相向或相背运动,所述第二限位板的滑动方向垂直于所述第二限位槽的轴心线方向,所述第二限位板与所述第二限位槽相配合将所述管道固定于所述第二限位槽中。
14、优选的技术方案为,所述第二限位基座设置有滑槽,所述第二限位板与所述滑槽滑动连接,所述第二限位板与所述滑槽的槽底之间夹设有第二弹性件。
15、优选的技术方案为,所述第二限位基座以及第二限位板的上表面设置有引导弧面。
16、优选的技术方案为,所述第二限位基座与所述第二限位板之间设置有避免所述第二限位板与所述滑槽相脱离的限位凸块。
17、本实用新型的优点和有益效果在于:本实用新型具有管道运输功能的管道安装机器人结构合理,通过设置放置台以及在放置台上设置限位组件,即可将管道固定于管道安装机器人上,实现了管道安装机器人将管道从管道存储平台运输到指定安装位置时管道夹持固定的目的,避免了管道掉落现象的发生。
技术特征:
1.一种具有管道运输功能的管道安装机器人,其特征在于,包括:
2.根据权利要求1所述的具有管道运输功能的管道安装机器人,其特征在于,所述第一限位件包括设置于所述第一限位槽(41)上方的第一限位板(5),所述第一限位板(5)与所述第一限位基座(4)转动连接,所述第一限位板(5)的转动轴轴心线方向平行于所述第一限位槽(41)的轴心线方向,所述第一限位板(5)设置有与所述管道(2)相抵接的限位部(51)。
3.根据权利要求2所述的具有管道运输功能的管道安装机器人,其特征在于,所述第一限位板(5)与所述第一限位基座(4)之间设置有用于将所述限位部(51)抵紧于所述管道(2)外壁的第一弹性件(6)。
4.根据权利要求2所述的具有管道运输功能的管道安装机器人,其特征在于,所述限位部(51)设置有弧形抵接面。
5.根据权利要求2所述的具有管道运输功能的管道安装机器人,其特征在于,所述第一限位板(5)固定设置有便于将其转动的按压板(52)。
6.根据权利要求1所述的具有管道运输功能的管道安装机器人,其特征在于,所述第一限位基座(4)设置有两个,两个所述第一限位基座(4)分设于所述机器人本体(1)的两端,两个所述第一限位基座(4)上的第一限位槽(41)的轴心线相重合设置。
7.根据权利要求1所述的具有管道运输功能的管道安装机器人,其特征在于,所述限位组件还包括第二限位基座(7),所述第二限位基座(7)设置有与管道(2)相限位配合的第二限位槽(71),所述第二限位槽(71)的上方滑动设置有两个第二限位板(8),两个所述第二限位板(8)同时相向或相背运动,所述第二限位板(8)的滑动方向垂直于所述第二限位槽(71)的轴心线方向,所述第二限位板(8)与所述第二限位槽(71)相配合将所述管道(2)固定于所述第二限位槽(71)中。
8.根据权利要求7所述的具有管道运输功能的管道安装机器人,其特征在于,所述第二限位基座(7)设置有滑槽(72),所述第二限位板(8)与所述滑槽(72)滑动连接,所述第二限位板(8)与所述滑槽(72)的槽底之间夹设有第二弹性件(9)。
9.根据权利要求7所述的具有管道运输功能的管道安装机器人,其特征在于,所述第二限位基座(7)以及第二限位板(8)的上表面设置有引导弧面(81)。
10.根据权利要求8所述的具有管道运输功能的管道安装机器人,其特征在于,所述第二限位基座(7)与所述第二限位板(8)之间设置有避免所述第二限位板(8)与所述滑槽(72)相脱离的限位凸块(82)。
技术总结
本技术公开了一种具有管道运输功能的管道安装机器人,包括:机器人本体;行驶组件,设置于机器人本体下方,用于驱动机器人本体移动;抓取组件,与机器人本体相连,用于抓取、安装管道;放置台,设置于机器人本体的上表面,用于运输时放置管道;限位组件,与放置台相连设置,用于运输时固定放置台上的管道;包括第一限位基座,第一限位基座设置有与管道相限位配合的第一限位槽,第一限位基座设置有用于将管道固定于第一限位槽中的第一限位件。上述具有管道运输功能的管道安装机器人结构合理,通过设置放置台以及限位组件,管道安装机器人在运输管道时可以将管道夹持固定。
技术研发人员:于进,杨德忠,王建鹏,刘献宇,刘晓军
受保护的技术使用者:鄂尔多斯市国源矿业开发有限责任公司
技术研发日:20231128
技术公布日:2024/7/25
- 还没有人留言评论。精彩留言会获得点赞!