一种行走式机械手取货装置的制作方法
本技术涉及机械手,尤其涉及一种行走式机械手取货装置。
背景技术:
1、在现今的生活上,科技日新月异的进展之下,机器人手臂与人类的手臂最大区别就在于灵活度与耐力度。也就是机械手的最大优势可以重复的做同一动作在机械正常情况下永远也不会觉得累。可为机械手臂的应用也将会越来越广泛,机械手是近几十年发展起来的一种高科技自动生产设备,作业的准确性和环境中完成作业的能力。工业机械手机器人的一个重要分支。
2、公开号为cn201320229121.4的专利文件公开了一种机械手装置,包括:平移梁结构、纵向平移小车构件、横向平移小车构件和机械手装置;所述平移梁结构包括:主梁、支撑柱、导轨一、齿条和支撑梁;所述主梁两端下方分别固定连接有支撑柱和支撑梁,所述导轨一和齿条通过螺栓固定镶嵌在主梁的同侧。
3、上述技术方案中其装置缺少移动结构,在进行大范围的取拿工作时就需要耗费大量时间转移装置,不仅降低了工作效率也增加了工人的劳动强度;因此我们提出一种行走式机械手取货装置来解决这个问题。
技术实现思路
1、本实用新型的目的在于提供一种行走式机械手取货装置,以解决上述背景技术中所提出的问题。
2、为了实现上述目的,本实用新型采用了如下技术方案:
3、一种行走式机械手取货装置,包括:底盘,所述底盘的内部滑动连接有滑动板,所述滑动板的底部四角均固定连接有万向轮所述滑动板的顶部固定连接有斜槽板,所述底盘的内部转动连接有螺纹杆,所述螺纹杆的外部螺纹连接有矩形板,所述矩形板的底部固定连接有竖板,所述竖板的前侧固定连接有圆柱体,所述圆柱体滑动连接在所述斜槽板的内部。
4、优选的,所述底盘的顶部转动连接有转盘,所述转盘的前侧转动连接有第一连杆,所述第一连杆的后侧转动连接有第二连杆,所述第二连杆的前侧转动连接有第三连杆,所述第三连杆的左侧固定连接有侧箱。
5、优选的,所述侧箱的内部滑动连接有两个梯形板,两个所述梯形板的左侧均固定连接有夹持板,所述侧箱的内部转动连接有双向丝杆,两个所述梯形板均螺纹套接在同一个所述双向丝杆的外部。
6、优选的,所述侧箱的内部固定连接有导向柱,两个所述梯形板的右侧均固定连接有延伸板,两个所述延伸板均滑动连接在同一个所述导向柱的外部,所述侧箱的底部固定连接有第二电机,所述第二电机的输出端固定连接在所述双向丝杆的底部。
7、优选的,所述底盘的右侧固定连接有安装柱,所述安装柱的右端固定连接有弧形板,所述弧形板的左侧固定连接有第一电机,所述第一电机的输出端固定连接在所述螺纹杆的右端。
8、优选的,所述侧箱的左侧设置有竖槽,两个所述梯形板均滑动连接在同一个竖槽内。
9、优选的,所述底盘的外部四角均固定连接有安装扣。
10、本实用新型中,所述的一种行走式机械手取货装置,通过启动第一电机带动螺纹杆转动,进一步使得矩形板开始向右侧移动,进一步通过矩形板带动竖板和圆柱体跟随向右侧移动,进一步通过圆柱体向右侧移动带动斜槽板开始向下侧移动,进一步使得滑动板和四个万向轮向下移动;
11、本实用新型中,所述的一种行走式机械手取货装置,通过启动第二电机,通过第二电机带动双向丝杆转动,进一步使得两侧梯形板开始相互靠近移动,进一步通过两侧梯形板带动两侧夹持板相互靠近移动;
12、本实用新型结构设计合理,通过夹持板、梯形板和双向丝杆实现了对物件的夹持功能,通过螺纹杆、矩形板、斜槽板和圆柱体的配合实现了装置的移动功能,使得其使用场景更广,提高了工作效率。
技术特征:
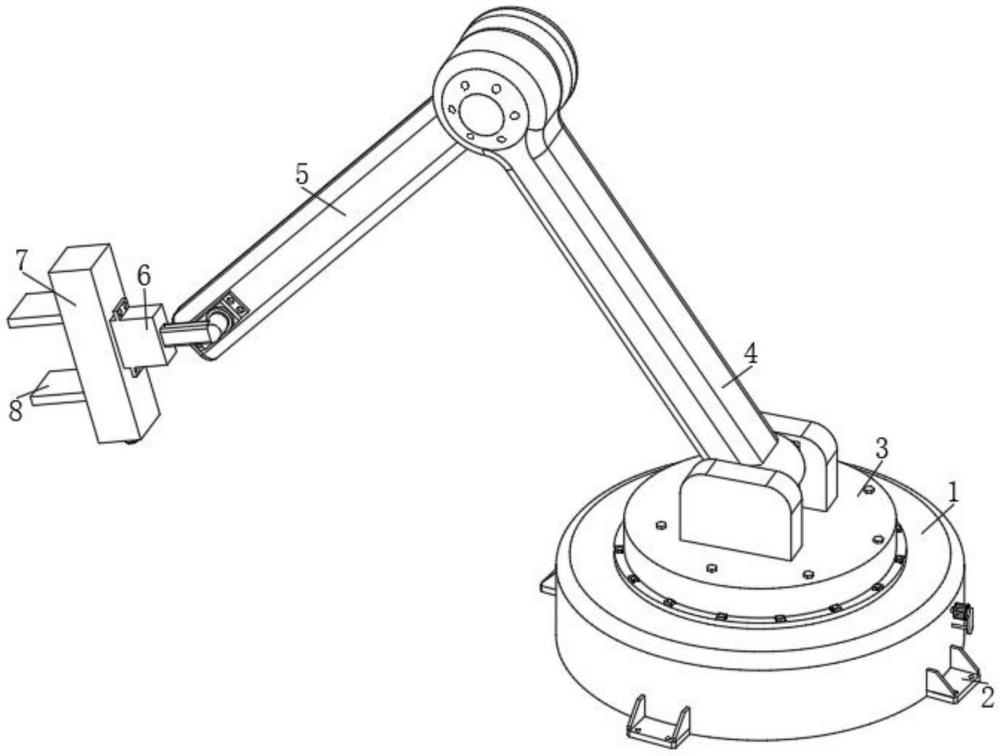
1.一种行走式机械手取货装置,其特征在于,包括:底盘(1),所述底盘(1)的内部滑动连接有滑动板(9),所述滑动板(9)的底部四角均固定连接有万向轮(18),所述滑动板(9)的顶部固定连接有斜槽板(17),所述底盘(1)的内部转动连接有螺纹杆(10),所述螺纹杆(10)的外部螺纹连接有矩形板(11),所述矩形板(11)的底部固定连接有竖板(15),所述竖板(15)的前侧固定连接有圆柱体(16),所述圆柱体(16)滑动连接在所述斜槽板(17)的内部。
2.根据权利要求1所述的一种行走式机械手取货装置,其特征在于,所述底盘(1)的顶部转动连接有转盘(3),所述转盘(3)的前侧转动连接有第一连杆(4),所述第一连杆(4)的后侧转动连接有第二连杆(5),所述第二连杆(5)的前侧转动连接有第三连杆(6),所述第三连杆(6)的左侧固定连接有侧箱(7)。
3.根据权利要求2所述的一种行走式机械手取货装置,其特征在于,所述侧箱(7)的内部滑动连接有两个梯形板(20),两个所述梯形板(20)的左侧均固定连接有夹持板(8),所述侧箱(7)的内部转动连接有双向丝杆(19),两个所述梯形板(20)均螺纹套接在同一个所述双向丝杆(19)的外部。
4.根据权利要求3所述的一种行走式机械手取货装置,其特征在于,所述侧箱(7)的内部固定连接有导向柱(22),两个所述梯形板(20)的右侧均固定连接有延伸板(21),两个所述延伸板(21)均滑动连接在同一个所述导向柱(22)的外部,所述侧箱(7)的底部固定连接有第二电机(23),所述第二电机(23)的输出端固定连接在所述双向丝杆(19)的底部。
5.根据权利要求1所述的一种行走式机械手取货装置,其特征在于,所述底盘(1)的右侧固定连接有安装柱(14),所述安装柱(14)的右端固定连接有弧形板(13),所述弧形板(13)的左侧固定连接有第一电机(12),所述第一电机(12)的输出端固定连接在所述螺纹杆(10)的右端。
6.根据权利要求3所述的一种行走式机械手取货装置,其特征在于,所述侧箱(7)的左侧设置有竖槽,两个所述梯形板(20)均滑动连接在同一个竖槽内。
7.根据权利要求1所述的一种行走式机械手取货装置,其特征在于,所述底盘(1)的外部四角均固定连接有安装扣(2)。
技术总结
本技术公开了一种行走式机械手取货装置,属于机械手技术领域,其包括:底盘,所述底盘的内部滑动连接有滑动板,所述滑动板的底部四角均固定连接有万向轮所述滑动板的顶部固定连接有斜槽板,所述底盘的内部转动连接有螺纹杆,所述螺纹杆的外部螺纹连接有矩形板,所述矩形板的底部固定连接有竖板,所述竖板的前侧固定连接有圆柱体,所述圆柱体滑动连接在所述斜槽板的内部,所述底盘的顶部转动连接有转盘,本技术结构设计合理,通过夹持板、梯形板和双向丝杆实现了对物件的夹持功能,通过螺纹杆、矩形板、斜槽板和圆柱体的配合实现了装置的移动功能,使得其使用场景更广,提高了工作效率。
技术研发人员:何志刚,艾宏伟
受保护的技术使用者:南京栗神鸟科技有限公司
技术研发日:20231129
技术公布日:2024/7/29
- 还没有人留言评论。精彩留言会获得点赞!