新型机器人铝制气动双指式夹爪
本技术涉及机器人,尤其涉及一种新型机器人铝制气动双指式夹爪。
背景技术:
1、现有的机器人夹爪夹持力稳定性不强,在机器人多轴连续运动过程中易发生夹持偏移。且卡爪多为纯气缸直线驱动,在夹持位置不同时力矩不均衡,更易受到夹持位置变化影响而导致零部件掉落。
技术实现思路
1、本实用新型为了有效的解决上述背景技术中的问题,提出了一种新型机器人铝制气动双指式夹爪。
2、具体技术方案如下:
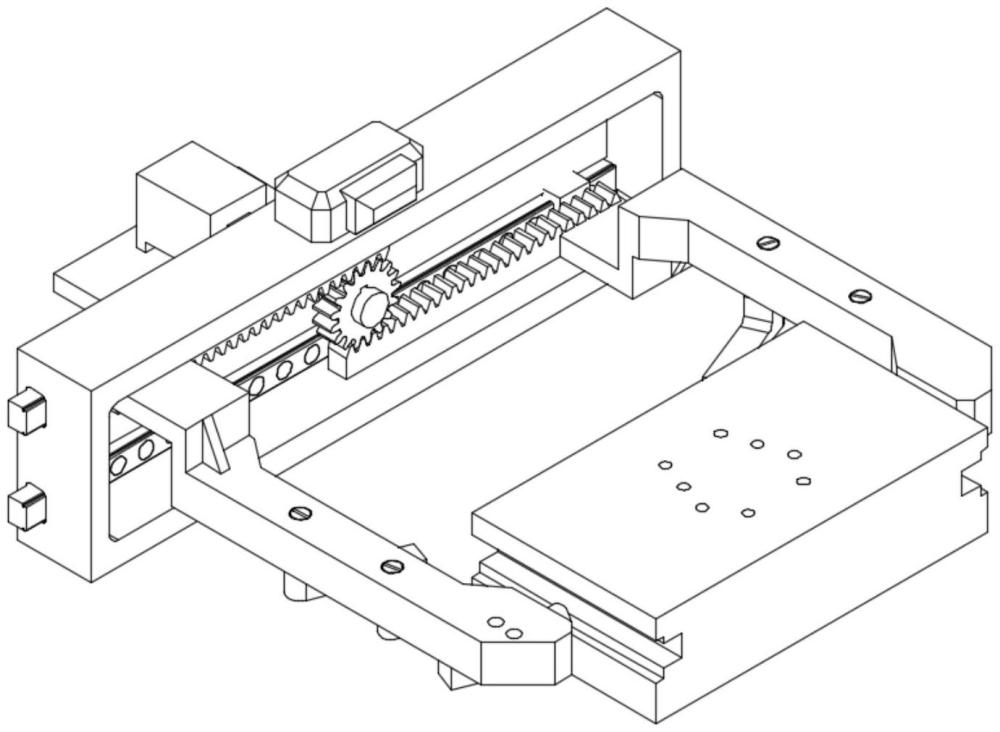
3、一种新型机器人铝制气动双指式夹爪,其特征在于:包括夹持爪、气动马达、齿轮、连杆、凸台、箱体、导轨、齿条和微型气缸;所述夹持爪的末端分别与齿条的一端固接,两根齿条分别与导轨滑动连接,两根齿条之间与所述齿轮啮合,所述齿条、导轨和齿轮都安装在箱体内,所述气动马达固定在所述箱体外侧,气动马达的输出端通过联轴器与所述齿轮连接,所述连杆与所述夹持爪的内侧铰接,连杆的另一端与所述凸台铰接,所述微型气缸置于所述夹持爪手指内部。
4、优选地,还包括装卡平台,装卡平台的两侧带有凹槽,所述微型气缸与所述凹槽配合。
5、优选地,所述凸台下部固定有推钩,推钩与所述装卡平台底部的限位槽配合。
6、优选地,所述连杆为两根。
7、与现有技术相比,本实用新型的有益效果是:铝制气动双指式夹持装置具有结构简单、操作便捷、可自由拆卸组装等优点。作为机械臂或工业机器人的末端执行机构,可实现前探及夹持功能。由于装置整体采用铝合金制成,相比市场普遍采用的其他金属合金材料抗磁性能更强,适用于在强磁环境中工作,精度更高,夹持更平稳。在工作时夹紧工件后,手指的实际夹紧位置大于手指收缩后的最小位置,此时微型气缸有一定的预留夹紧行程,避免在换装过程中不必要的碰触装卡平台时仍能可靠的夹紧工件。微型气缸的存在还能达到快速换装的目的。此装置采用高强度铝合金材料制成,具有重量轻、强度高、加工方便、成本较低等优点。易于生产制造、安全可靠、便于操作。机器人夹爪是机器人系统中的关键组成部件,分析研究机器人夹爪的设计,进行合理的结构设计,应用于合适的工作环境,对于推广机器人的应用,推动制造业的发展,提高智能制造产业水平有着重要意义。
技术特征:
1.一种新型机器人铝制气动双指式夹爪,其特征在于:包括夹持爪、气动马达、齿轮、连杆、凸台、箱体、导轨、齿条和微型气缸;所述夹持爪的末端分别与齿条的一端固接,两根齿条分别与导轨滑动连接,两根齿条之间与所述齿轮啮合,所述齿条、导轨和齿轮都安装在箱体内,所述气动马达固定在所述箱体外侧,气动马达的输出端通过联轴器与所述齿轮连接,所述连杆与所述夹持爪的内侧铰接,连杆的另一端与所述凸台铰接,所述微型气缸置于所述夹持爪手指内部。
2.根据权利要求1所述的一种新型机器人铝制气动双指式夹爪,其特征在于,还包括装卡平台,装卡平台的两侧带有凹槽,所述微型气缸与所述凹槽配合。
3.根据权利要求2所述的一种新型机器人铝制气动双指式夹爪,其特征在于,所述凸台下部固定有推钩,推钩与所述装卡平台底部的限位槽配合。
4.根据权利要求1所述的一种新型机器人铝制气动双指式夹爪,其特征在于,所述连杆为两根。
技术总结
本技术涉及机器人技术领域,尤其涉及一种新型机器人铝制气动双指式夹爪,包括夹持爪、气动马达、齿轮、连杆、凸台、箱体、导轨、齿条和微型气缸;所述夹持爪的末端分别与齿条的一端固接,两根齿条分别与导轨滑动连接,两根齿条之间与所述齿轮啮合,所述齿条、导轨和齿轮都安装在箱体内,所述气动马达固定在所述箱体外侧,气动马达的输出端通过联轴器与所述齿轮连接,所述连杆与所述夹持爪的内侧铰接,连杆的另一端与所述凸台铰接,所述微型气缸置于所述夹持爪手指内部。铝制气动双指式夹持装置具有结构简单、操作便捷、可自由拆卸组装等优点。
技术研发人员:杜培铎,李巍,肖万鹏,苗奎奎,柳宜,左维
受保护的技术使用者:天津中德应用技术大学
技术研发日:20231129
技术公布日:2024/11/4
- 还没有人留言评论。精彩留言会获得点赞!