一种自带防跌落装置的机器人的制作方法
本技术涉及机器人,尤其涉及一种自带防跌落装置的机器人。
背景技术:
1、送餐机器人是一种自动化设备,被设计用于将食品从餐厅或厨房送到顾客的位置,通常通过提前设置的目标地点或者通过遥控等方式实现。
2、公开号cn216399648u公开了送餐机器人,包括:移动底盘,移动底盘的顶部具有第一边缘和第二边缘,第一边缘与第二边缘相对设置;支撑部,从第一边缘沿竖向向上延伸;以及至少一个托盘,沿竖向间隔设于支撑部上,并分别朝第二边缘的所在侧延伸;其中,移动底盘、支撑部和托盘于同一水平面上的投影重叠并形成投影区域,投影区域的最长处的长度为40~50厘米,投影区域的最宽处的宽度为35~45厘米。虽然该种送餐机器人体积可以小型化,从而解决了现有的送餐机器人体积较大难以通过宽度在米以下的通道的技术问题。但是该种送餐机器人并未设置餐碗的限位结构,如果送餐机器人在凹凸不平的路面上行驶或者突然进行急刹车或急转弯,都可能导致餐碗失去平衡,从而导致餐碗跌落,造成经济损失和食物的浪费,甚至影响客户满意度。
技术实现思路
1、本实用新型的目的是为了解决上述背景技术中提出的技术问题。
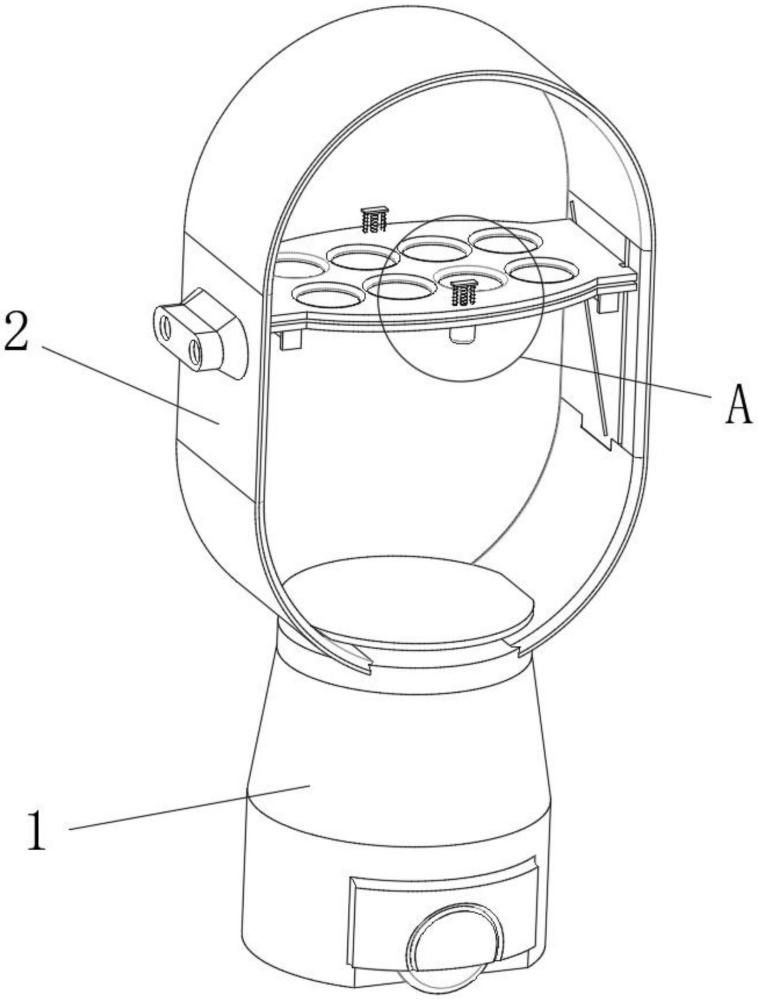
2、本实用新型采用了如下技术方案:一种自带防跌落装置的机器人,包括移动底座和放置板,所述移动底座的顶端固定安装有架板,所述放置板的底端固定安装有电机,所述电机的输出端固定安装有螺纹杆,所述放置板的顶端固定安装有定位杆,所述定位杆的顶端固定安装有顶板,所述定位杆的表面套设有弹簧,所述螺纹杆的表面转动连接有限位板,所述限位板的内侧开设有放置槽,所述放置槽的表面设置有软垫。
3、较佳的,所述螺纹杆与顶板转动连接,所述定位杆与限位板滑动连接。此处,通过设置螺纹杆、限位板,可以在电机带动螺纹杆转动时,螺纹杆与限位板之间通过螺纹作用带动限位板升起,从而将放置在放置槽中的餐碗进行限位,通过设置定位杆、顶板,可以在电机带动限位板上升的过程中配合弹簧继续起到缓冲作用,从而有效的提高限位板的使用寿命。
4、较佳的,所述弹簧的一端在顶板的底端固定安装,所述弹簧的另一端在限位板的顶端固定安装。此处,通过设置弹簧,可以在电机带动限位板升起时,限位板在定位杆的表面向上滑动,接着弹簧会被限位板挤压发生形变,从而可以起到缓冲作用,提高整体的稳定性。
5、较佳的,所述软垫的材质为天然橡胶。此处,天然橡胶制成的软垫具有柔软,使用寿命长等优点,并且具有优异的防滑性能。
6、较佳的,所述放置板的内侧转动连接有滚轮a,所述放置板的底端固定安装有固定板,所述固定板的背面固定安装有长杆,所述长杆的表面滑动连接有滑板,所述滑板的内侧转动连接有滚轮b,所述滑板的内侧固定安装有短杆,所述短杆的表面套设有卡板,所述卡板的内侧设置有扭簧,所述卡板的表面固定安装有把手,所述放置板的底端固定安装有卡块。此处,通过设置滚轮a、固定板、长杆、滑板、滚轮b、短杆、卡板、扭簧、把手、卡块、竖槽、斜槽,可以将放置板在架板的内侧进行快速的上下调节,从而可以根据菜品的高度进行相应的调整,确保它们在运输过程中不会碰撞或倾斜。
7、较佳的,所述架板的内侧开设有竖槽,所述架板的内侧开设有斜槽,所述滚轮a与竖槽滚动连接,所述滚轮b与斜槽滚动连接。此处,通过设置竖槽、斜槽、滚轮a、滚轮b,可以起到定位作用,从而可以确保放置板进行正确的高度调节,并且滚轮a、滚轮b的设置可以有效的减少放置板位置调整工作时的摩擦力。
8、较佳的,所述扭簧的一端在短杆的表面固定安装,所述扭簧的另一端在卡板的内侧固定安装。此处,通过设置扭簧,可以带动卡板与卡块进行卡合,从而可以对放置板进行快速的位置调节固定工作。
9、与现有技术相比,本实用新型的优点和积极效果在于:
10、1、本实用新型中,通过设置电机、螺纹杆、定位杆、顶板、弹簧、限位板、放置槽、软垫,可以在将餐碗通过放置槽放在放置板的顶端后,接着启动电机并通过螺纹杆带动限位板上升,从而配合放置槽对餐碗进行限位,避免机器人在送餐的过程中经过凹凸不平的路面或者突然进行急刹车或急转弯时导致餐碗失去平衡,从而可以有效的避免餐碗跌落的情况发生。
11、2、本实用新型中,随着不同餐厅和餐品的差异,餐品的高度尺寸可能会有所不同,通过设置滚轮a、固定板、长杆、滑板、滚轮b、短杆、卡板、扭簧、把手、卡块、竖槽、斜槽,可以根据餐品的实际情况进行对放置板的高度调节,从而可以容纳不同尺寸和形状的餐品,确保它们在运输过程中不会碰撞或倾斜,不仅调整过程迅捷方便,并且可以有效的增加送餐机器人的灵活性。
技术特征:
1.一种自带防跌落装置的机器人,包括移动底座(1)和放置板(3),其特征在于:所述移动底座(1)的顶端固定安装有架板(2),所述放置板(3)的底端固定安装有电机(4),所述电机(4)的输出端固定安装有螺纹杆(5),所述放置板(3)的顶端固定安装有定位杆(6),所述定位杆(6)的顶端固定安装有顶板(7),所述定位杆(6)的表面套设有弹簧(8),所述螺纹杆(5)的表面转动连接有限位板(9),所述限位板(9)的内侧开设有放置槽(10),所述放置槽(10)的表面设置有软垫(11)。
2.根据权利要求1所述的自带防跌落装置的机器人,其特征在于:所述螺纹杆(5)与顶板(7)转动连接,所述定位杆(6)与限位板(9)滑动连接。
3.根据权利要求1所述的自带防跌落装置的机器人,其特征在于:所述弹簧(8)的一端在顶板(7)的底端固定安装,所述弹簧(8)的另一端在限位板(9)的顶端固定安装。
4.根据权利要求1所述的自带防跌落装置的机器人,其特征在于:所述软垫(11)的材质为天然橡胶。
5.根据权利要求1所述的自带防跌落装置的机器人,其特征在于:所述放置板(3)的内侧转动连接有滚轮a(12),所述放置板(3)的底端固定安装有固定板(13),所述固定板(13)的背面固定安装有长杆(14),所述长杆(14)的表面滑动连接有滑板(15),所述滑板(15)的内侧转动连接有滚轮b(16),所述滑板(15)的内侧固定安装有短杆(17),所述短杆(17)的表面套设有卡板(18),所述卡板(18)的内侧设置有扭簧(19),所述卡板(18)的表面固定安装有把手(20),所述放置板(3)的底端固定安装有卡块(21)。
6.根据权利要求5所述的自带防跌落装置的机器人,其特征在于:所述架板(2)的内侧开设有竖槽(22),所述架板(2)的内侧开设有斜槽(23),所述滚轮a(12)与竖槽(22)滚动连接,所述滚轮b(16)与斜槽(23)滚动连接。
7.根据权利要求5所述的自带防跌落装置的机器人,其特征在于:所述扭簧(19)的一端在短杆(17)的表面固定安装,所述扭簧(19)的另一端在卡板(18)的内侧固定安装。
技术总结
本技术提供一种自带防跌落装置的机器人,涉及机器人技术领域,包括移动底座和放置板,所述移动底座的顶端固定安装有架板,所述放置板的底端固定安装有电机,所述电机的输出端固定安装有螺纹杆,所述放置板的顶端固定安装有定位杆,所述定位杆的顶端固定安装有顶板。本技术中,通过设置电机、螺纹杆、定位杆、顶板、弹簧、限位板、放置槽、软垫,可以在将餐碗通过放置槽放在放置板的顶端后,接着启动电机并通过螺纹杆带动限位板上升,从而配合放置槽对餐碗进行限位,避免机器人在送餐的过程中经过凹凸不平的路面或者突然进行急刹车或急转弯时导致餐碗失去平衡,从而可以有效的避免餐碗跌落的情况发生。
技术研发人员:张意,汪洋,黄胜男
受保护的技术使用者:常州市卓晓数字技术有限公司
技术研发日:20231207
技术公布日:2024/7/23
- 还没有人留言评论。精彩留言会获得点赞!