一种医用机器人精度快速检测工具的制作方法
本技术属于医疗设备检测辅助工具,具体涉及一种医用机器人精度快速检测工具。
背景技术:
1、机器人技术起源于上世纪60年代,最初的应用行业是制造业。随着科技的快速发展,机器人已经在美国、日本等发达国家广泛应用于很多领域。同时,随着我国经济的飞速发展,我国在机器人技术领域也取得了很大的进展。
2、医用机器人技术是近年来发展迅速的一个领域。随着我国医学技术的不断提高,医用机器人技术在我国的发展也日趋成熟。目前,医用机器人已经广泛应用于手术、诊断、康复训练等方面。其中,手术机器人是应用最为广泛的医用机器人之一。手术机器人采用微创手术技术,比传统手术更为精准和安全,能够完成人手难以完成的操作,例如在头脑手术中引导微型器械实施操作。
3、在医用机器人技术的发展过程中,如何保证机器人的精度是一个关键问题。精度是医用机器人的一个重要指标,直接影响到手术的成功率和病人的康复情况。因此,开发一种能够快速检测医用机器人精度的工具具有重要的意义。
4、目前,医用机器人精度的检测主要采用传统的测量方法,如激光干涉仪、三坐标仪等。这些方法虽然可以获得较高的测量精度,但设备昂贵、操作复杂、且测量速度较慢。因此,开发一种能够快速检测医用机器人精度的工具是当前亟待解决的问题。
5、针对现有技术的不足,本发明提供了一种医用机器人精度快速检测工具。该工具采用接触探测的定性测量法,能够快速判断医用机器人的精度是否符合要求,且成本低,更易于推广。
技术实现思路
1、本实用新型提供了一种医用机器人精度快速检测工具,旨在解决现有技术中医用机器人系统精度无法快速检测的问题。
2、为了解决上述技术问题,本实用新型所采用的技术方案为:
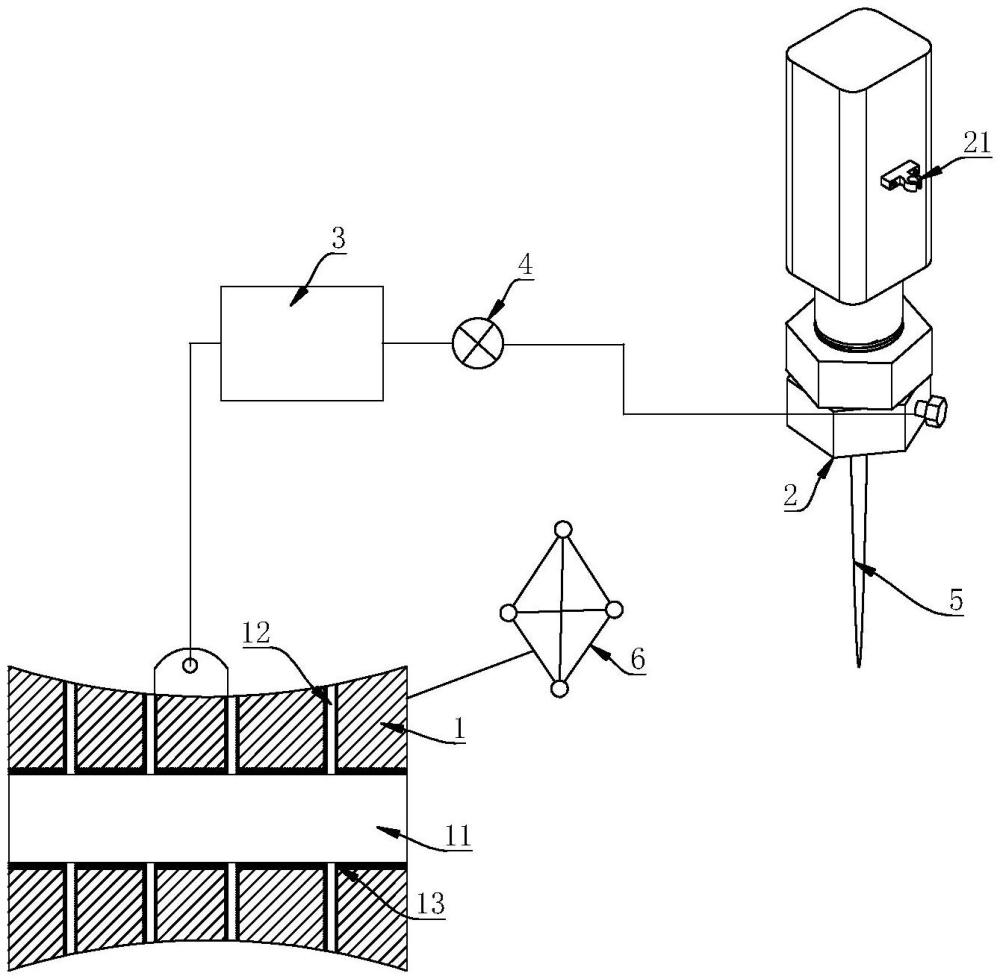
3、一种医用机器人精度快速检测工具,包括脊柱模型、光学标记支架、探针、电源和指示灯,所述光学标记支架与所述脊柱模型固接;
4、所述脊柱模型内具有空腔,所述脊柱模型上设置有检测孔,所述检测孔与所述空腔相通,所述空腔的侧壁和所述检测孔的侧壁上均设置有导电层,位于所述空腔侧壁上的导电层与所位于所述检测孔侧壁上导电层电性连接;
5、机械臂本体上设置有用于经过所述检测孔伸入所述空腔内的探针,所述探针与所述电源的正极电性连接,所述指示灯串接于所述探针与所述电源的正极之间;
6、位于所述检测孔侧壁上的导电层与所述电源的负极电性连接,所述探针通过所述检测孔伸入所述空腔,所述探针与位于所述检测孔侧壁上的导电层或者所述探针与位于所述空腔侧壁上的导电层接触时,所述探针与所述导电层形成电性连接,使所述指示灯点亮。
7、进一步改进的方案:所述脊柱模型包括骨节,所述骨节有若干节,每节所述骨节上均设置有空腔,每节所述骨节上均设置有若干个所述检测孔,每节所述骨节上均设置有导电层,位于每节所述骨节上的导电层均通独立的导线与所述电源的负极电性连接。
8、基于上述技术方案:每节骨节均通过独立的导线与电源的负极电性连接,骨节之间不需要良好的电性连接即可满足检测需求,因此,骨节易于连接。
9、进一步改进的方案:所述探针通过螺纹固定于所述机械臂本体上,所述机械壁臂本体上设置有内螺纹,所述探针上设置有外螺纹。
10、基于上述技术方案:探针可以方便地与机械臂本体装配或拆除,从而可以更换不同规格的探针进行检测。
11、进一步改进的方案:所述探针包括针体,所述针体的上端设置有安装座,所述安装座上设置有安装柱,外螺纹设置于所述安装柱上。
12、基于上述技术方案:通过设置安装座和安装柱,使得探针与机械臂易于装配。探针的直径一般较小,因此,需要设置安装座以及安装柱,使探针与机构臂易于装配。
13、进一步改进的方案:所述安装柱与所述针体同轴设置,所述安装柱与所述安装座为一体式结构,所述安装座与所述针体为一体式结构。
14、基于上述技术方案:探针采用一体式结构,各部位之间精度高,进而使得探针相对于机械臂具有较高的位置精度。
15、进一步改进的方案:所述安装座上设置有固定导线的接线柱,所述接线柱通过螺纹固定于所述安装座上,所述安装座上设置有设置所述接线柱的平面。
16、基于上述技术方案:导线与安装座为面接触,使得导线与安装座之间具有良好的导电性能。
17、进一步改进的方案:所述机械臂本体上设置有绝缘连接筒,所述绝缘连接筒内设置有内螺纹,位于所述绝缘连接筒上的内螺纹与位于所述安装柱上的外螺纹配合,所述绝缘连接筒粘接于所述机械臂本体上。
18、基于上述技术方案:通过设置绝缘连接筒,电源的电能不会传导至机械臂本体,使得机械臂本体不带电,防止发生触电事故。
19、进一步改进的方案:所述绝缘连接筒上还设置有绝缘螺母,所述绝缘螺母抵触所述安装座。
20、基于上述技术方案:通过设置绝缘螺母,绝缘螺母与安装座接触在一起,起到对安装座防松的功能,探针不易从绝缘连接筒上脱离。
21、进一步改进的方案:所述绝缘连接筒的外壁上设置有与所述绝缘螺母配合的螺纹。
22、进一步改进的方案:所述机械臂本体上还设置有固定导线的卡线器,所述卡线器通过螺钉固定于所述机械臂本体上。
23、基于上述技术方案:通过设置卡线器,卡线器可以方便地固定导线。
24、本实用新型的有益效果为:
25、先将脊柱模型放置于目标位置,然后,将探针固定于机械臂上,再将电源的负极与脊柱模型内的导电层电连接连接,电源的正极与指示灯电性连接,指示灯再与探针电性连接。
26、设置医用机器人系统进入检测模式,医用机器人识别脊柱模型上的光学标记支架,使安装于机械臂本体上的探针通过检测孔伸入空腔内。探针伸入空腔的过程中,如果机械臂本体的精度下降,此时,安装于机械臂本体上的探针会碰触检测孔侧壁上的导电层或者空腔侧壁上的导电层,从而使得电源正极、指示灯与电源负极之间形成通路,此时,指示灯点亮,说明机械臂本体的精度不符合要求。
27、在检测机械臂本体精度时,仅需要操作机械臂本体使探针通常检测孔进入空腔内,观察指示灯是否点亮即可方便地确定机械臂本体精度是否符合要求,操作十分方便。
技术特征:
1.一种医用机器人精度快速检测工具,其特征在于:包括脊柱模型、光学标记支架、探针、电源和指示灯,所述光学标记支架与所述脊柱模型固接;
2.根据权利要求1所述的一种医用机器人精度快速检测工具,其特征在于:所述脊柱模型包括骨节,所述骨节有若干节,每节所述骨节上均设置有空腔,每节所述骨节上均设置有若干个所述检测孔,每节所述骨节上均设置有导电层,位于每节所述骨节上的导电层均通独立的导线与所述电源的负极电性连接。
3.根据权利要求1所述的一种医用机器人精度快速检测工具,其特征在于:所述探针通过螺纹固定于所述机械臂本体上,所述机械臂本体上设置有内螺纹,所述探针上设置有外螺纹。
4.根据权利要求3所述的一种医用机器人精度快速检测工具,其特征在于:所述探针包括针体,所述针体的上端设置有安装座,所述安装座上设置有安装柱,外螺纹设置于所述安装柱上。
5.根据权利要求4所述的一种医用机器人精度快速检测工具,其特征在于:所述安装柱与所述针体同轴设置,所述安装柱与所述安装座为一体式结构,所述安装座与所述针体为一体式结构。
6.根据权利要求5所述的一种医用机器人精度快速检测工具,其特征在于:所述安装座上设置有固定导线的接线柱,所述接线柱通过螺纹固定于所述安装座上,所述安装座上设置有设置所述接线柱的平面。
7.根据权利要求6所述的一种医用机器人精度快速检测工具,其特征在于:所述机械臂本体上设置有绝缘连接筒,所述绝缘连接筒内设置有内螺纹,位于所述绝缘连接筒上的内螺纹与位于所述安装柱上的外螺纹配合,所述绝缘连接筒粘接于所述机械臂本体上。
8.根据权利要求7所述的一种医用机器人精度快速检测工具,其特征在于:所述绝缘连接筒上还设置有绝缘螺母,所述绝缘螺母抵触所述安装座。
9.根据权利要求8所述的一种医用机器人精度快速检测工具,其特征在于:所述绝缘连接筒的外壁上设置有与所述绝缘螺母配合的螺纹。
10.根据权利要求1所述的一种医用机器人精度快速检测工具,其特征在于:所述机械臂本体上还设置有固定导线的卡线器,所述卡线器通过螺钉固定于所述机械臂本体上。
技术总结
本技术属于医疗设备检测辅助工具技术领域,具体涉及一种医用机器人精度快速检测工具。本技术提供了一种医用机器人精度快速检测工具,旨在解决现有技术中脊柱手术用的机械臂精度无法快速检测的问题。一种医用机器人精度快速检测工具,包括脊柱模型、光学标记支架、探针、电源和指示灯;设置医用机器人系统进入检测模式,医用机器人识别脊柱模型上的光学标记支架,使安装于机械臂本体上的探针通过检测孔伸入空腔内。探针伸入空腔的过程中,如果机械臂本体的精度下降,此时,安装于机械臂本体上的探针会碰触检测孔侧壁上的导电层或者空腔侧壁上的导电层,从而使得电源正极、指示灯与电源负极之间形成通路,此时,指示灯点亮,说明机械臂本体的精度不符合要求。
技术研发人员:陈落根,郑建,黄丹,吴夷,孙正捷,陈维
受保护的技术使用者:浙江省医疗器械检验研究院(国家食品药品监督管理局杭州医疗器械质量监督检验中心)
技术研发日:20231214
技术公布日:2024/10/28
- 还没有人留言评论。精彩留言会获得点赞!